基于CATIA的手動平移艙門受力分析
2020-10-20 07:18:51王飛宇
汽車實用技術 2020年15期
王飛宇
摘 要:文章以北方客車BFC6123系列車型某一四連桿機構的手動平移艙門為例,使用CATIA零件模塊和裝配模塊進行三維建模及CATIA的DMU模塊(數字運動機構仿真)進行運動幅的約束和仿真,從而模擬手動平移艙門的整個運動過程,并針對艙門運動過程中的四種狀態進行受力分析和運動校核,通過分析與校核提高了手動平移艙門設計的可靠性和便利性。
關鍵詞:客車;艙門;手動平移;受力分析;運動校核
中圖分類號:F570.71? 文獻標識碼:A? 文章編號:1671-7988(2020)15-142-04
Abstract: Taking a translational hatch door with four-link mechanism of North Bus BFC6123 series as an example, this paper carries out 3D modeling and simulates the motion process of manual translational door based on CATIA. The four states in the process of the door movement are analyzed and checked, and the reliability and convenience of manual translation door design are improved.
Keywords: Coach; Hatch door; Manual translational; Force Analysis; Movement check
CLC NO.: F570.71? Document Code: A? Article ID: 1671-7988(2020)15-142-04
前言
隨著人們對出行和旅游的熱情日益激增,客車數量隨之大幅增長,客運站及景區停車場的客車停泊密度亦愈來愈大。上翻式側艙門因車輛間距小而導致無法完全開啟,不便于乘客取放行李;而手動平移側艙門具備開啟時占用空間小、開啟度大、取放行李方便、艙門變形量小、工作可靠和開關速度快等優點,因而備受推崇[1-3]。但手動平移艙門若設計不合理,容易出現啟閉費力、舉升無力、關閉不嚴等問題,需精準設計以確保其具有平滑可靠的啟閉過程及良好的密封。
下面以北方客車BFC6123系列車型某一行李艙洞口的手動平移機構及側艙門為例,基于CATIA軟件、針對艙門運動過程中的四種狀態進行了受力分析,并對艙門的運動過程進行了校核,避免了在設計中出現上述不合理的問題。
1 手動平移艙門的結構及工作原理
1.1 手動平移艙門的結構
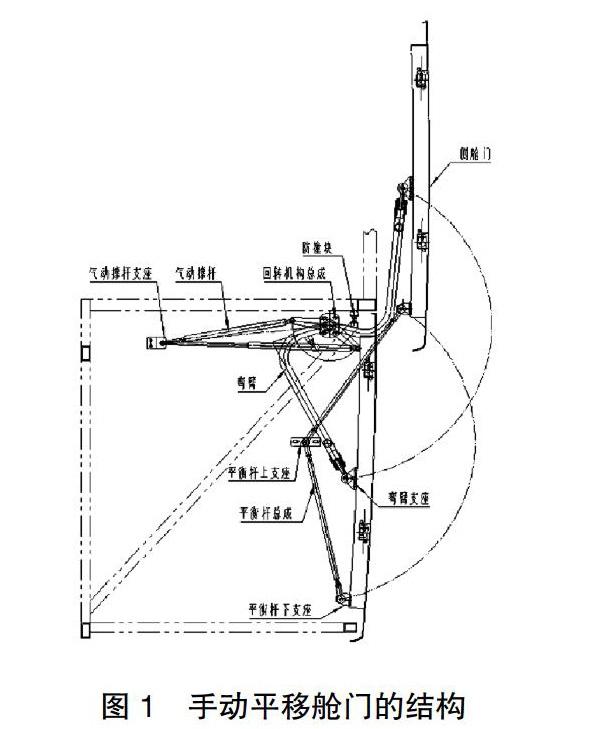
手動平移艙門的結構由回轉機構總成(含支撐座總成、轉軸、主動軸、彎臂及其支座、平衡桿總成及其上下支座、氣動撐桿支座)、側艙門(含門板、鎖止機構、門鎖和連接手動平移機構用的預埋板)、氣動撐桿及車身結構(含平衡桿支座預埋件、氣動撐桿支座和艙門密封結構等)組成。主要零件見圖1所示。其中,轉軸、彎臂、平衡桿和氣動撐桿等的支座等均設計為帶長孔的可調整結構,并且轉軸、彎臂、平衡桿帶有長度為30mm~40 mm正反絲的螺紋段,以便于該結構的安裝和調整[4-5]。
1.2 手動平移艙門的工作原理
手動平移艙門的整個運動過程,分為完全閉合、完全開啟和中間運動過程三個狀態。
手動平移艙門完全閉合狀態下,通過人的拉力將艙門抬升一定高度后松手,艙門在氣動撐桿的作用下,力矩通過彎臂作用于艙門,該力矩克服艙門自身重力產生的力矩后,將艙門舉起,直到彎臂上的防撞塊頂到車身的預埋件上,達到完全開啟狀態。
關閉艙門時,通過人的拉力,將艙門拉下一定高度后松手,艙門在自身重力和氣動撐桿雙重作用力下,自動關閉。為了保證艙門時刻保持與車身呈基本平行狀態,平移機構設有平衡桿,來保持艙門整體運行平穩、不至于翻轉。艙門關閉后,依靠氣動撐桿、艙門自身重力及門鎖的鎖緊力來共同壓緊安裝于車身的膠條,使得艙門與車身密封嚴實、可靠[6-7]。
2 運動過程及受力分析
2.1 理論模型的建立
為了更好的研究和分析艙門的運動過程,將整套結構簡化為理論模型如下:
(1)彎臂的上端與旋轉軸剛性連接,彎臂的下端通過彎臂支座與艙門上的預埋件鉸接。在下面的受力分析中,將艙門視作重物,重心直接作用于鉸接點,即重力方向由鉸接點豎直向下,同時彎臂的強度高,為剛性梁,受力分析時取直;
(2)平衡桿的上端通過平衡桿上支座與車身鉸接,其下端通過平衡桿下支座與艙門的預埋件鉸接。由于平衡桿僅為保持艙門狀態的平衡,對艙門的作用力很小,在受力分析中予以忽略不計;
(3)氣動撐桿的一端與彎臂上的短臂鉸接,該短臂與彎臂成一定的角度,氣動撐桿的另一端通過氣動撐桿支座鉸接于車身;
(4)為了簡化模型,假設上述所用鉸接、轉軸處均為理想狀態,即不考慮各種狀態下的摩擦力;
(5)從艙門完全關閉到艙門完全打開,運動機構內部受力大小、方向等整體狀態時刻改變,模型選取以下四個狀態節點做詳細分析:艙門完全關閉狀態、氣動撐桿死點狀態、受力平衡點狀態和完全打開狀態。在四個狀態節點之間的狀態,為中間過渡過程,各個狀態區間只有受力大小的變化,受力的方向沒有變化;
(6)行李艙門和手動平移機構選取北方客車BFC6123系列車型的某一行李艙洞口為例,使用CATIA零件模塊和裝配模塊進行三維建模,使用CATIA的DMU模塊(數字運動機構仿真)進行運動副的約束和仿真,模擬該結構的整個運動過程,參見圖2和圖3。
該建模所用艙門的重力為250N,所用的2根氣動撐桿的公稱壓力T均為700N,一般氣動撐桿初選時的公稱壓力為側艙門自身重力的3倍左右[5]。
2.2 在CATIA軟件中的受力分析
在建立的理論模型基礎上,分別對艙門完全關閉狀態、氣動撐桿死點狀態、受力平衡點狀態和完全打開狀態進行受力分析,計算過程和結果如下。其中:M1為氣動撐桿舉升力產生的力矩,M2為艙門自身重力產生的力矩,M為整個艙門所受到的合力矩。
2.2.1 艙門完全關閉狀態
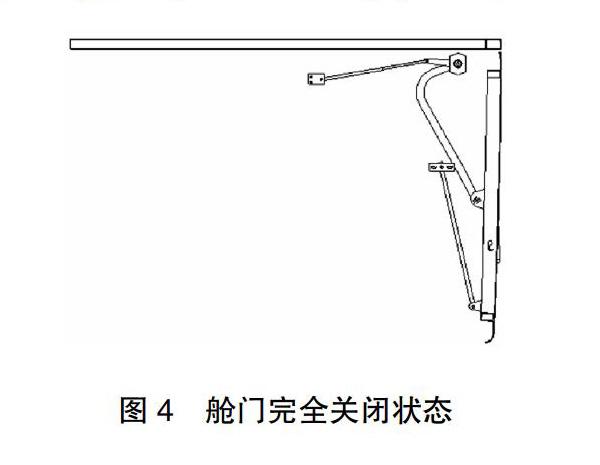
艙門完全關閉狀態時,主要零件位置見圖4。
該力矩是完全閉合狀態下的艙門自鎖力矩,其可以保證艙門關閉可靠、膠條密封嚴實。當打開艙門時,需克服此力矩,若以垂直于力臂的方向向外拉艙門,如圖所示力F,那么拉力F的大小為:F=M/S2=64/0.52=123N。
即在艙門完全關閉狀態下,手動拉力打開艙門的最小力值為123N。
2.2.2 氣動撐桿死點狀態
艙門未完全打開,氣動撐桿處于死點狀態時,主要零件位置見圖6。
該狀態時的受力情況如圖7所示:
2.2.3 艙門受力平衡狀態
艙門處于受力平衡狀態時,主要零件位置見圖8。
2.2.4 艙門完全開啟狀態
艙門處于完全開啟狀態時,主要零件位置見圖10。
艙門處于完全開啟狀態時,氣動撐桿接近最長,受力情況如圖11所示:
3 結束語
根據上述計算結果可知,該車型的手動平移艙門能夠實現啟閉省力、舉升有力可靠并且能達到密封嚴實有效。
但是由于理論模型分析均忽略了各種摩擦力和阻力,并且各種摩擦力和阻力的方向均為運動方向的相反方向,故打開和關閉手動平移艙門時所用的力要比理論計算值略大,受力平衡位置也比理論計算高度略高。同時,由于理論模型是基于整套結構裝配完好的狀態,即旋轉軸與支座、氣動撐桿連接軸與支座、彎臂與艙門支座完全同軸,并且氣動撐桿運動軌跡面與門板平面垂直,但實際裝配后存在一定的安裝誤差,從而造成力在非有用方向上的分解,也會對艙門開關造成一定的影響。
參考文獻
[1] 陳永軍.客車側艙門鉸鏈淺析[J].客車技術與研究,2004,26(4): 25-27.
[2] 文廣南.客車行李艙門四連桿結構的探討[J].客車技術與研究, 2003,25(3):21-24.
[3] 付強,孫雪玲,倪永智.上擺式客車行李艙門的設計[J].沈陽航空工業學院學報,2004,21(2):37-38.
[4] 李小龍.YCK6938H 型客車平移式行李艙門四連桿機構的設計[J].客車技術與研究,2004,26(3):24-25.
[5] 吳東.基于UG的四連桿機構平移式側艙門設計[J].客車技術與研究,2016,4:36-38.
[6] 沈中華.平移式后發動機艙門四連桿的設計及附件選擇[J].客車技術與研究,2007(3):32-33.
[7] 淡潤民,李銀坤.客車氣動平移式行李艙門的設計[J].汽車零部件, 2012,07:70-73.
