
一種基于大型貨車視野盲區的層疊式預警系統
2020-10-21 04:14:03李磊磊馮朝陽楊文科
汽車實用技術 2020年12期
李磊磊 馮朝陽 楊文科

摘 要:因內輪差現象導致駕駛員右轉存在視線盲區而引發交通事故的案例層出不窮,研究設計并開發了一套根據大型貨車速度和轉彎角度以及危險區域外障礙物的移動來實現以探測器定向探測及光線投射為特點,并向司機端進行聲音報警,且地面危險區域可調的層疊式預警系統。開展此研究可在大型商用車于彎道轉彎時,提醒行人或其他小型乘用車注意避讓,對降低事故發生率,減少人員傷亡有積極作用。
關鍵詞:內輪差;激光投影;交通安全
Abstract: Due to the inner difference phenomenon caused by the driver turn right eye blind area and frequent traffic accidents, research design and develop a set of according to the large truck speed and turning angle of danger outside obstacles and movement to achive to probe the directional detection and projection of light, and voice alarm to the drivers side, and adjustable cascading two ground dangerous area warning system. Carrying out this research can remind pedestrians or other small passenger vehicles to pay attention to avoid when large commercial vehicles turn on the curve, which has a positive effect on reducing the accident rate and reducing casualties.
Keywords: Inner wheel difference; Laser projection; Traffic safety
前言
根據中國國家統計局數據顯示,截至2018年底,載貨汽車保有量占汽車總保有量的22.11%,而貨車引起的責任事故更是占汽車責任事故總量的30.5%,其中因為內輪差所導致的交通事故約占17.1%,造成的傷亡人數占貨車責任事故總量的27.81%,因此貨車因內輪差所導致的傷亡人數占比明顯高于其責任事故起數占比。內輪差是指車輛轉彎時內前輪轉彎半徑與內后輪轉彎半徑之差,由于內輪差的存在,會導致車輛轉彎時前后車輪的運動軌跡產生不重合的現象。因此針對內輪差,本研究設計了基于大型貨車速度和轉彎角度以及危險區域外障礙物的移動來實現以探測器定向探測及光線投射為特點,并向司機端進行聲音報警,且地面危險區域可調的層疊式預警系統,可有效解決內輪差導致的貨車安全問題。
1 內輪差模型的建立
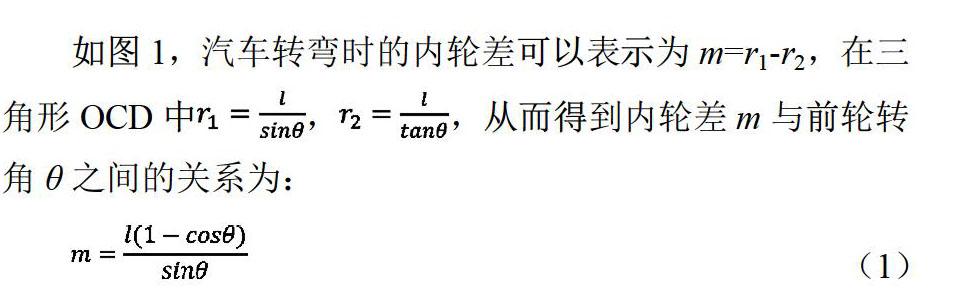
如圖1,汽車轉彎時的內輪差可以表示為m=r1-r2,在三角形OCD中,,從而得到內輪差m與前輪轉角θ之間的關系為:
圖中:l為后輪軸距,d為車輪橫向輪距;OD長r1;OC長r2;汽車前輪轉角θ的范圍為0°< θ <60°。
2 轉角模型的建立
3 裝置模塊的設計
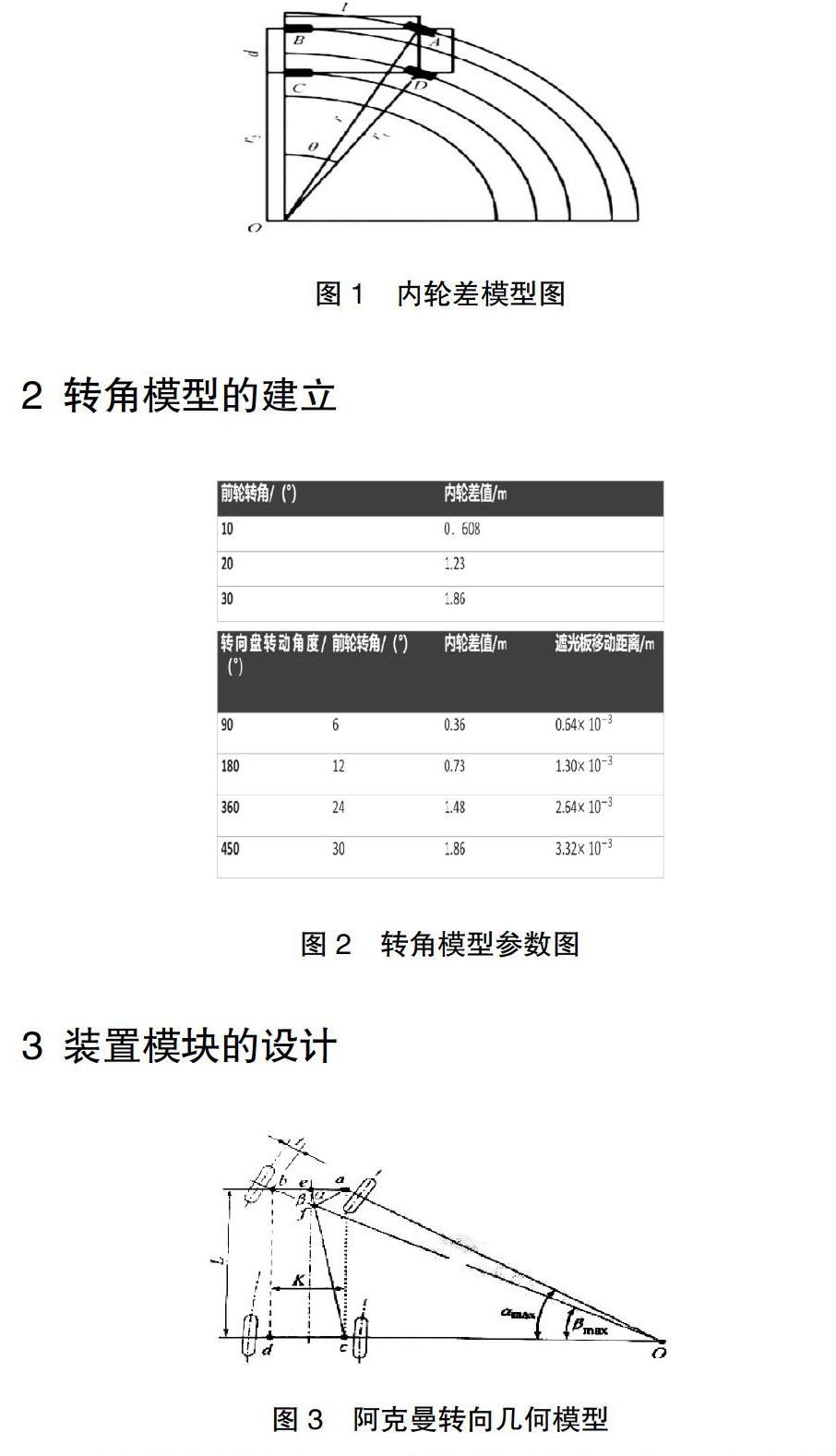
裝置模塊的設計? 根據轉角模型參數,首先要建立前輪轉角與步進機上的遮光板移動距離的關系。因為汽車轉彎后即回正,前輪轉角的變化范圍從0°變化到最大值再到0°,內輪差的范圍也由最小值到最大值,最終為零。而與步進電機相連接的遮光板的移動距離也隨之動態變化,因此需要建立這三者之間的數學模型。根據轉向系統基于阿克曼幾何理論曲線設計來保證轉向時的運動軌跡符合瞬時旋轉中心交叉于一點。由圖1可知:
其中:K是兩主銷中心距,L是軸距,i是轉向比,a+β是車前輪轉向角度之和,θ是轉向盤轉角。
因此當車輛的轉向比的范圍確定后,前輪轉角和方向盤轉角呈線性關系,不同車型的轉向傳動比的范圍是不同的,大貨車的轉向轉向傳動比在14:1和35:1之間。在此以大貨車作為研究對象,根據轉向角度傳感器采集的方向盤轉角θ的參數變化,基于阿克曼幾何理論曲線可以得到前輪轉角的變化范圍,由此,通過轉向盤轉角的變化控制車輪轉向范圍,再由轉向盤連動步進電機遮光板的位移,確定危險區域的范圍。[1]
4 技術模塊的設計
(1)主控模塊:Freescal K60單片機
K60單片機在整個預警系統中作為一個終端機,利用其實時數據處理能力和控制功能,對轉向角度傳感器輸出的信號進行實時的檢測和寫入。同時,在轉向傳感器信號寫入時,給步進電機驅動信號,使步進電機驅動遮光板進行移動,使整個預警系統開始工作。
(2)汽車轉向角度傳感模塊:轉向角度傳感器
汽車轉向角度傳感器,如圖5,用以測定轉向盤的轉動角度和轉向方向,在此以轉向盤轉向角度傳感器作為轉向信號監測和采集的主要部件。轉向角度傳感器時刻采集方向盤轉動的角度變化,將角度信號轉化為電信號發送給主控模塊,主控模塊從而驅動步進電機帶動遮光板的移動,使警示系統正常工作。方向盤轉角傳感器有霍爾效應式、磁阻式、光電式等多種類型,目前汽車多采用磁電阻式角度傳感器,因為其具有操作簡便,性能穩定,可實現實時監測和非接觸式測量等優點。本裝置采用測量量程較大的磁電阻式角度傳感器。
(3)激光投射模塊:高精度伺服舵機和半導體線激光器
利用K60單片機輸出的脈寬調制(PWM)控制信號,來控制舵機的轉動方向。半導體激光器具有緊湊、穩定、耐用等特點,最主要的是其可作為便捷光源。利用半導體激光器發射激光,形成警示區域。整個激光投射模塊由高精度伺服舵機(圖6)和半導體線激光器加工組裝而成,可根據需要調節投射激光線的長度和粗細。
(4)主動探測模塊:毫米波雷達和廣角攝像頭
如圖7, 主動探測模塊中由毫米波雷達和廣角攝像頭組成,障礙物(非機動車輛和行人等)距貨車的速度和距離由毫米波雷達實時檢測,廣角攝像頭用于捕捉貨車轉彎時的路況,采集的信號經 數模轉換后發送給K60單片機,K60單片機經過邏輯運算,輸出控制信號使預警裝置正常工作。
(5)聲光報警模塊
當車輛轉向時,主控模塊接收到角度傳感模塊發出的轉向指令后,通過內輪差模型在單片機中計算得到危險區域。通過激光投射模塊將所得的危險區域投影至地面,同時激活主動探測模塊,危險情況下同時觸發聲光報警模塊發出報警信號[2]。
5 未來研究方向
進一步對裝置的可行性進行研究: 由于行人缺乏安全知識,很少知曉大型車輛在右轉時內輪差會引發交通事故。故本研究先以在地面上通過激光投射的危險區域警示周邊行人及車輛,并在車輛右側加裝了主動探測模塊。當車輛右轉時,若行人或機動車輛進入危險區域,主動探測模塊便會被激活主動向行人及駕駛員報警。
未來裝置趨于智能化:未來預警裝置要從燈光顏色、聲音分貝、預警效果等多個方面改善駕駛員工作環境。即利用預警裝置給司機適宜的外界信息刺激,從而提高駕駛員的駕駛室內的工作標準,即提高人機交互的水平。
對警示燈光的進一步研究:根據交通心理學相關知識,通常人們把紅色、黃色、橙色稱為暖色調,而同一位置上的不同顏色會使人看到后所產生的距離感不同,一般而言,暖色系及明度大的顏色看上去比較生動突出,叫前進色,相反冷色系和低明亮度顏色看上去比較靜止,叫后退色,因此警示燈采用紅色等暖色調,使行人能夠快速意識到危險,但是有時候暖色燈光會對駕駛人視野起到干擾現象,因此未來需要對警示燈光進一步進行研究,選擇可以適應不同路面條件的燈光顏色。
6 結論
開展本系統的研究,可在貨車轉彎時警示行人和其他車輛來減少事故的發生,對降低或避免人員傷亡和經濟損失有重大現實意義。此外,也會減少對遭遇事故家庭帶來的創傷、對公司帶來的財產損失以及對社會帶來影響。因此,本項目市場前景廣闊,對社會和經濟有重要意義。同時適應性廣泛、成本低廉、安全性高,可供物流公司、礦產企業等需要大量貨車進行運輸的公司或集團使用,并且將減少公司或集團的運輸成本,從而提高利潤。簡而言之,這一層疊式預警系統具有極大的普適性和推廣性,極具實際運用價值。
參考文獻
[1] 褚正清,劉家保,宋星.貨車右轉彎內輪差的建模研究[J].河北北方學院學報(自然科學版),2015,31(05):49-52.
[2] 鐘策.大型車輛轉彎安全警示燈設計研究[D].西南交通大學,2016.
