上海軟X射線自由電子激光腔式束流位置測量系統
2020-10-24 01:41:22袁任賢俞路陽賴龍偉冷用斌
原子能科學技術 2020年10期
陳 健,袁任賢,俞路陽,賴龍偉,冷用斌,2,*
(1.中國科學院 上海高等研究院,上海 201204;2.中國科學院 上海應用物理研究所,上海 201800)
上海軟X射線自由電子激光裝置(SXFEL)是我國第1臺能輻射出X射線的相干光源,主要由光陰極注入器、直線加速器、兩級高增益諧波放大器和診斷線站構成。第1階段為實驗裝置,電子束能量可被加速至840 MeV,其目標是在軟X射線波段區實現9 nm出光并驗證級聯的高增益諧波放大模式的可行性。第2階段將升級為用戶裝置,通過增加兩個C波段加速結構將電子束能量增至1.5 GeV,其目標是實現2 nm出光并提供長期穩定、具有超高亮度的X射線脈沖,為材料、物理生物研究等提供高分辨成像、超快過程探索、先進結構解析等尖端研究手段[1]。
而根據自由電子激光(FEL)的運行機制,為減少FEL輻射輸出功率衰退,在波蕩器段需使電子束與產生的輻射光能有效進行相互作用并實現高效的能量轉換和傳輸,從而要求電子束與光子束的軌道近乎一致[2-3],因此要求束流橫向位置測量系統的分辨率好于μm甚至亞μm量級。各種束流位置探測器中僅采用諧振腔結構的腔式束流位置測量(cavity beam position monitor, CBPM)系統能耦合束流在腔內激發的多種電磁場特征模式,具有極高的位置靈敏度,能滿足此需求[4],因而被廣泛應用于各類FEL裝置和國際線性對撞機中[5-7]。本文設計研制1個由C波段腔式探頭、單路混頻至低中頻的射頻前端以及自主研發的專用數字信號束流位置處理器(digital beam position monitor processor, DBPM)構成的CBPM。
1 系統需求
根據FEL物理設計給出的技術要求[1],為滿足SXFEL調試、驗收、運行及機器研究的需要,在實驗裝置中,波蕩器段束流位置測量系統需提供17個CBPM探頭,分別安裝在每臺波蕩器的入口和出口處,用于束流位置的精確測量。此外,根據CBPM的相位腔(參考腔)特性,其耦合出的信號幅度與束團電荷量呈正比,可用于精確的束團電荷量的相對測量;而信號的初始相位還包含束團到達時間的信息,可用于束團到達時間的精確測量。因此,建成后的系統應達到如下主要技術指標。
1) 束流橫向位置測量。提供束流軌道的精確測量值,并用于軌道校正,從而找到電子束的理想軌道。要求測量系統的位置分辨率在束團電荷量為500 pC、系統動態范圍為±500 μm的條件下好于1 μm(表示為1 μm@500 pC±500 μm)。
2) 束團到達時間測量。結合束流橫向位置測量,實現電子束團和種子激光在三維空間上的同步。要求測量系統的時間分辨率好于100 fs。
3) 束團電荷量的相對測量。要求測量系統的相對電荷量測量分辨率好于0.1%。
4) 系統測量線性范圍在束團電荷量為500 pC時≥±2 mm。
2 CBPM探測原理
當束團通過諧振腔時,由于尾場效應會在腔內激發出電磁場的各種特征模式。對于標準的圓柱形腔體,當束團沿z軸通過時,由于TM(transverse magnetic)模式具有縱向電場,束團將在其自身激發的縱向電場里損失能量,導致該模式得到有效激發,因此,只有TM模式被激發且振幅由損失的束流能量決定。其中,偶極模TM110具有軸向反對稱性,其軸向電場分量在圓坐標系中可由式(1)表示[8-9]:
(1)
式中:E0為電場強度;J1為一階貝塞爾函數;μ11為一階貝塞爾函數的第1個根;r為腔體半徑;ω為腔體諧振角頻率;ρ為徑向坐標。當ρ接近0時,J1(ρ)正比于ρ,即當束流在腔體電中心附近時,所激勵的TM110信號強度與中心偏移量呈正比,且在軸心兩側的電場相位相差180°。因此,偶極模的激發電壓Vz可由束團位置偏移量x和束團電荷量q簡單表示:
Vz=A0qx
(2)
為消除束團電荷量抖動帶來的影響并為束團偏移方向的判斷提供1個參考相位,還需添加1個主工作模式為單極模的參考腔。對于標準圓柱型腔體,當束流在腔體電中心附近時,單極模TM010的軸向電場分量可由式(3)表示[8-9]:
(3)
式中:J0為零階貝塞爾函數;μ01為零階貝塞爾函數的第1個根。當束團偏離中心軸的距離較小時,即ρ較小時,零階貝塞爾函數J0(ρ)的值接近于1,信號強度與束流偏心位置無關,而只與束團電荷量q相關,因此常用于位置腔信號的歸一化以及束團電荷量的相對測量。并且由于該模式電場的軸向對稱性,當束團偏離中心軸兩側時,其相位一致,可作為位置腔TM110模信號相位的參考基準,從而可進行束流偏移方向的判斷。此外,束流到達時間也可從參考腔TM010模式相對主時鐘信號的RF相位測得。
3 系統設計及研制
3.1 硬件結構
依據FEL物理的需求,SXFEL的CBPM系統探頭分布及硬件結構如圖1所示。共有17個CBPM探頭分布在每臺波蕩器的入口和出口處,根據探頭較大范圍分布的特點,系統的數據采集采用了分布式的結構,在技術走廊也有與探頭分布對應的4個束測本地站,每個本地站機柜最多可配有5套射頻前端、5套DBPM、1套本振信號源和1套定時扇出模塊,用于完成對應CBPM探頭信號的處理和分析。
整個系統主要由3部分組成:位于隧道內的腔式探頭拾取電子束在腔內激發的電磁場特征模式信號,并由短接同軸電纜組件傳輸至前置放大前端中完成信號的濾波和預放大,以減小有效信號在長距離主射頻電纜中的損耗;預處理的信號經插入損耗較低的Times的LMR600射頻電纜傳輸至束測本地站,再和本振源產生的與束流完全同步、低相位噪聲的本振信號下變頻至約500 MHz中頻,由DBPM接收該饋入信號,并在定時網絡扇出的觸發信號同步下對信號進行量化、處理完成束流位置等信息的提取,最后以EPICS(experimental physics and industrial control system)運行數據庫記錄方式向控制系統提供束流位置等數據服務。
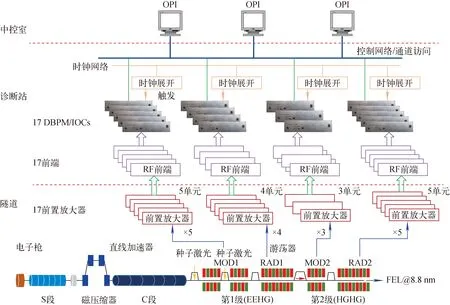
圖1 CBPM系統硬件結構Fig.1 Hardware configuration of CBPM system
1) 腔式BPM探頭
考慮到SXFEL的束團重復頻率僅10 Hz,為降低對后續信號處理電子學在數據采集上的壓力以及獲取更多的信號處理增益,選用高有載品質因子Q的方案。探頭的結構參考日本SACLA的設計優化而成[6],為避免來自主加速器系統的暗電流干擾,腔體的工作頻率需遠離主加速器工作頻率2 856 MHz的整數和半整數倍頻率,結合SXFEL波蕩器段16 mm的真空管道直徑,因此將諧振腔的工作頻率選擇在4.7 GHz附近,而為提高腔體的Q,腔體材料采用了電導率更高的無氧銅[10]。圖2為設計的高Q型CBPM探頭的三維結構示意圖。
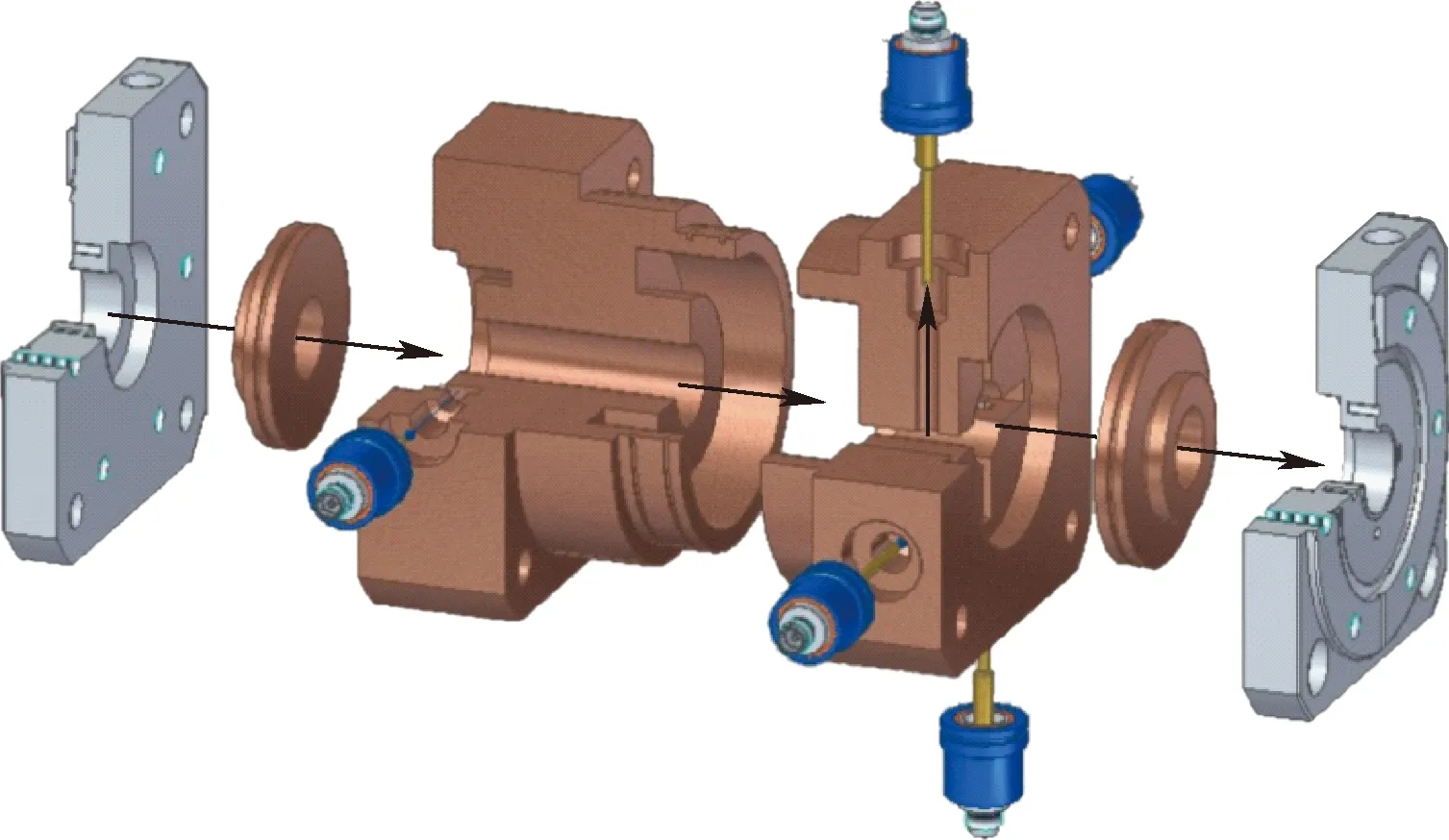
圖2 高Q型CBPM探頭三維結構示意圖Fig.2 Three-dimensional structure of high-Q CBPM
為減小腔體間的串擾對束流位置測量的影響,在探頭設計和加工中將水平、垂直位置腔和參考腔的諧振頻率設定得略有偏差,其頻率f分別設定:在水平方向為4.681 GHz、垂直方向為4.689 GHz、參考腔為4.694 GHz[11]。經多批零件加工測試來探索加工精度對腔體諧振頻率和Q的影響趨勢,采用參考腔和位置腔獨立加工,各自指標達到要求后整體焊接的方法,并在最終組裝焊接前、后均用網絡分析儀進行腔體諧振頻率和Q的測試,以保證腔體批量加工的一致性。圖3、4分別為批量加工17套CBPM的諧振頻率和Q一致性的測量結果。
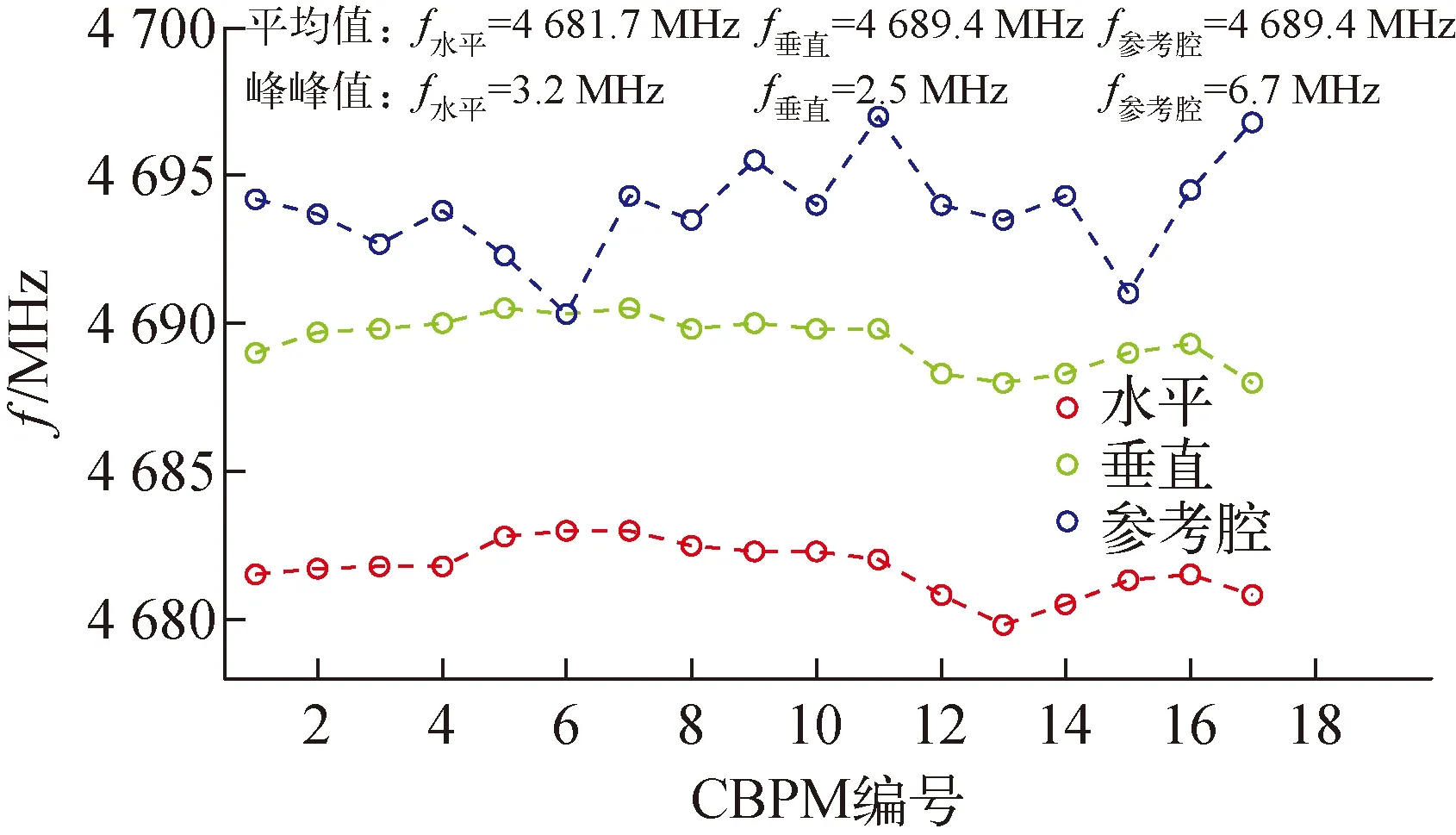
圖3 諧振頻率一致性測量結果Fig.3 Measurement result of resonant frequency
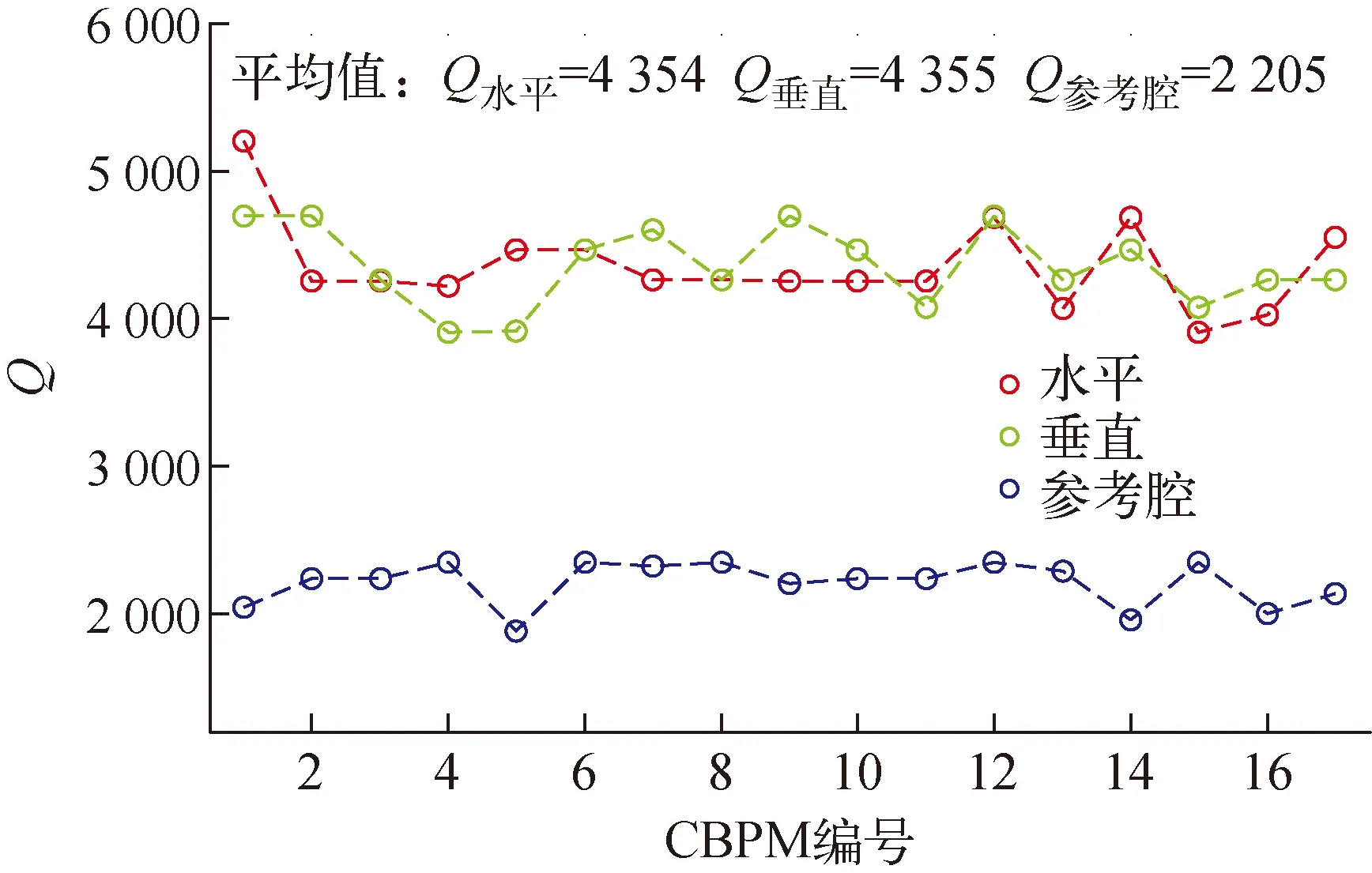
圖4 Q一致性測量結果Fig.4 Measurement result of Q
由上圖批量測試結果可知,腔體加工頻差可控制在±3 MHz以內,Q一致性可控制在10%以內。
2) RF前端
RF前端的主要功能是將從腔體中耦合出的高頻信號進行調理、整形,使輸出的IF信號能匹配ADC(analog-to-digital converter)最佳輸入量程,并降低信號的載波頻率,有效利用現有高分辨率ADC的性能。
對于RF前端,其設計要求包括有:
(1) 前端噪聲系數NF小于15 dB;
(2) 本振輸出信號與束流信號完全同步,相位抖動附加(RMS)小于30 fs;
(3) IF信號頻率約500 MHz,以匹配后續信號處理電子學的模擬輸入帶寬要求;
(4) 三通道IF信號輸出幅值大致相同,以匹配ADC輸入量程;
(5) 在束團電荷量1 nC條件下,最大束流偏心4 mm,前端不損壞。
據此設計了一款基于外差接收機架構的RF前端,其結構框圖如圖5所示。
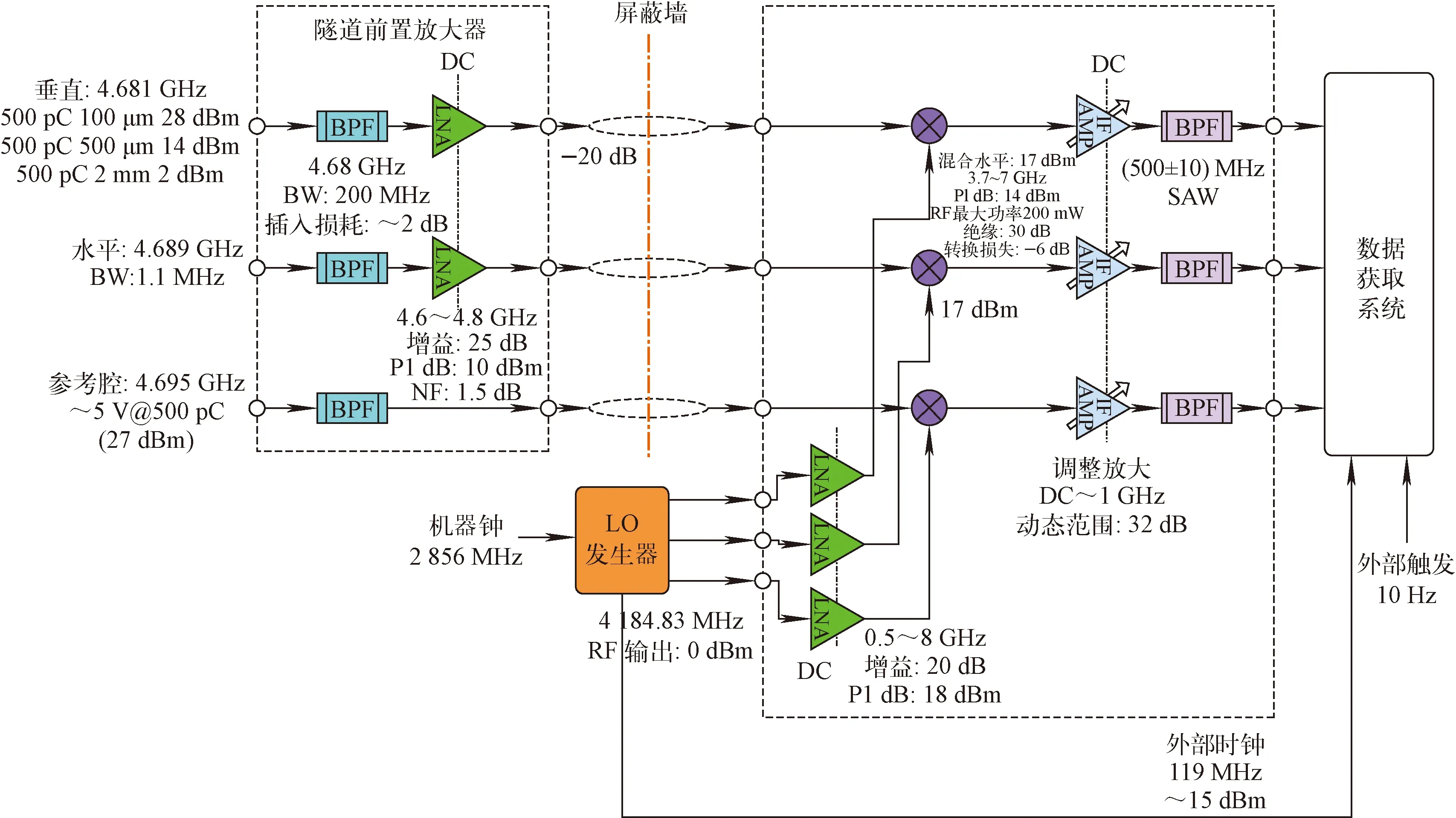
圖5 射頻前端結構框圖Fig.5 Block diagram of RF front-end
整個RF前端分為兩部分,一部分是位于隧道內的前置放大前端,對從腔體耦合出來的信號進行濾波和預放大,以減小連接隧道內外的長距離傳輸電纜對有效信號的損耗。另一部分位于隧道外,本振信號發生器接收定時系統傳輸過來的2 856 MHz的參考時鐘信號,輸出與束團信號同步的頻率為4 184.83 MHz的LO信號,將隧道內引出的腔體信號下變頻至500 MHz附近。集成在DBPM中的可調中頻放大器完成最后的增益調整,以滿足ADC的最佳幅度輸入要求,且中心頻率為500 MHz、帶寬為±10 MHz的聲表面濾波器作為抗混疊濾波器以抑制其他諧波的干擾。
為實現本振信號與束流同步,并保證較小的相位抖動附加,采用模擬混頻直接合成的LO信號產生方式,其基本原理是將參考信號進行多次分頻、混頻和倍頻組合,以最大程度降低分頻對本底噪聲的影響,其方案如圖6所示。
經Agilent E5052A信號分析儀測試,該合成方案的本振輸入輸出信號RMS小于10 fs,滿足設計要求。
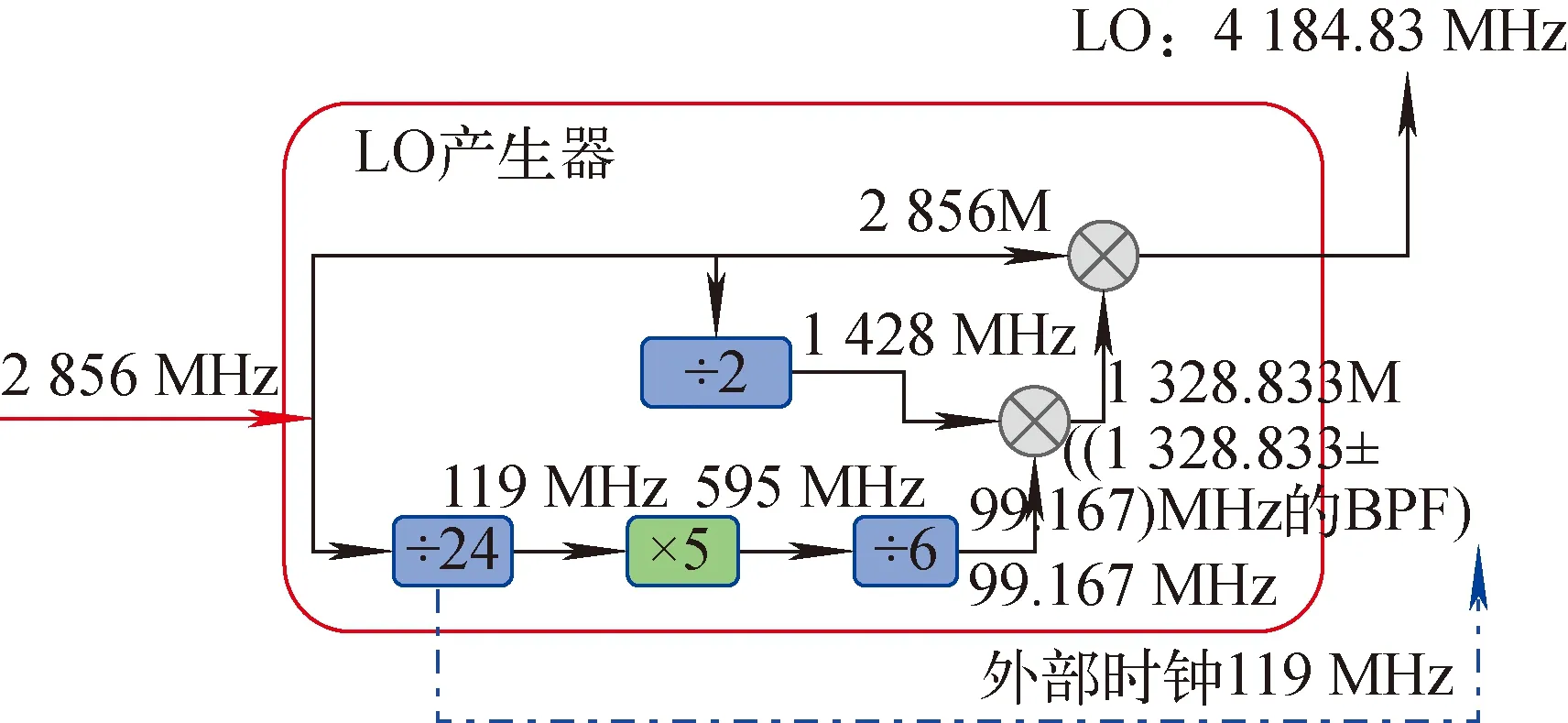
圖6 模擬直接頻率合成方案示意圖Fig.6 Diagram of analog direct frequency synthesis scheme
3) 數字BPM信號處理器
數據的采集和信號處理采用了上海光源束測組自主研發的數字束流位置處理器,該處理器基于軟件無線電架構,采用帶通采樣技術作為信號的量化方案。在硬件結構上采用嵌入式Standalone結構,主要由1個射頻信號調理子板和1個數字處理母板組成,射頻信號調理子板主要完成信號的調理整形和信號的量化,數字處理母板以FPGA(field programmable gate array)作為信號處理平臺進行在線數字信號的處理,并結合ARM處理器實現信號傳輸、儲存和數據的獲取等功能[12-16],整體硬件結構如圖7所示。
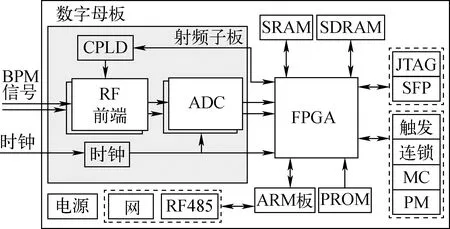
圖7 DBPM硬件結構框圖Fig.7 Hardware structure diagram of DBPM
3.2 軟件結構
數據的獲取采用分布式結構,在DBPM電子學的ARM中運行ARM-Linux操作系統并集成了EPICS IOC(input output controller),并以運行數據庫記錄的形式實現系統參數的配置、原始ADC數據以及計算得到的束流位置等結果數據的獲取和傳輸。運行人員可通過位于OPI(operator interface)層的EDM面板進行電子學設備的控制以及運行數據的監測,系統軟件架構如圖8所示。
CBPM的在線信號處理在底層的FPGA中實現,以滿足未來SXFEL用戶裝置50 Hz束團重復頻率的工作模式[17-18]。在信號處理算法上,在采用傳統的快速傅里葉變換方法進行信道幅度和相位提取的基礎上,針對DBPM電子學中FPGA內部資源不足只能截取有效波形處512點數據進行計算的特殊情況,提出了固定FFT諧振頻率點處的下標來解調相位的優化方案,解決了由于柵欄效應引起的相位解調存在較大誤差的問題。
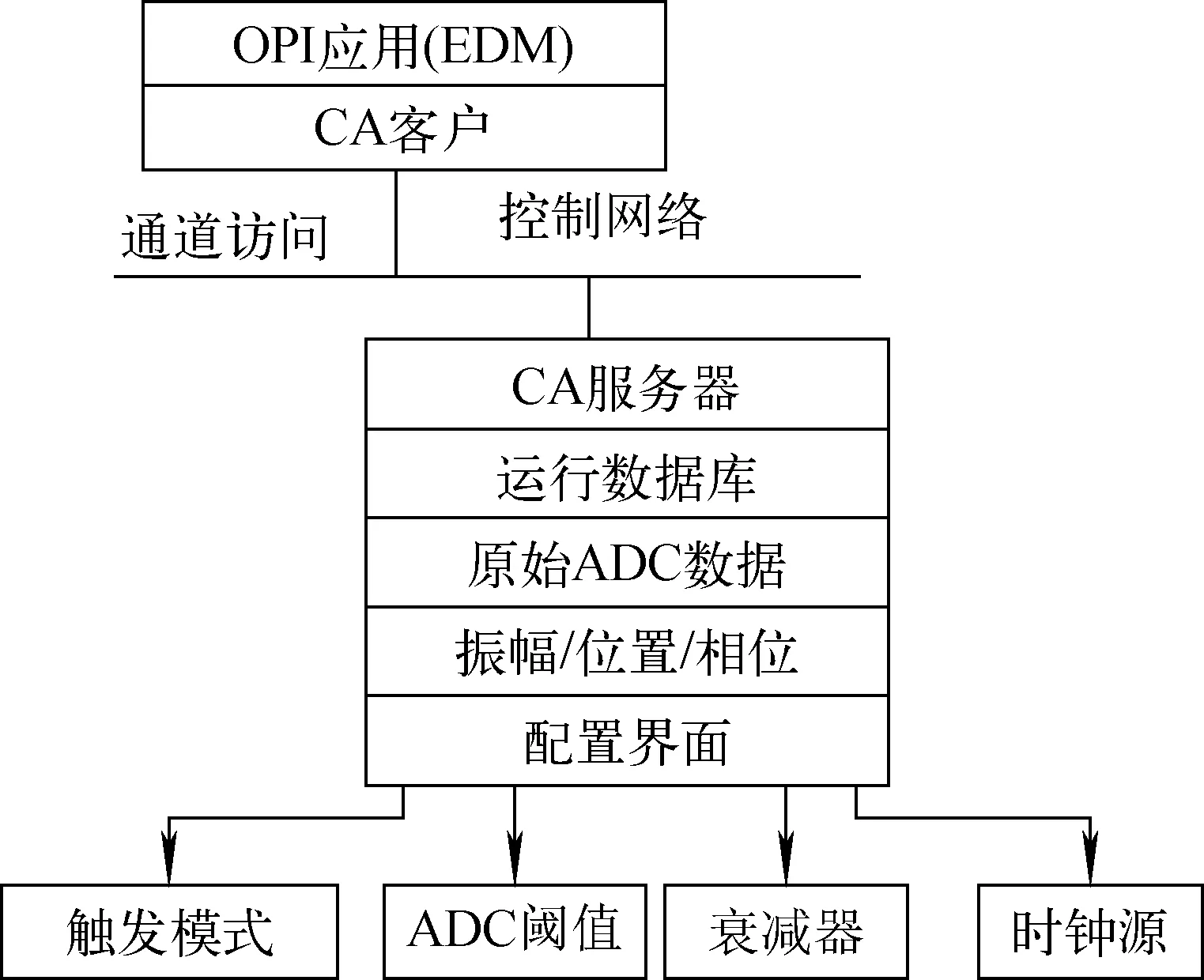
圖8 系統軟件架構Fig.8 Software architecture of system
4 系統調試及性能評估
基于系統的設計和研制,在SXFEL中完成了CBPM系統的搭建,并在此基礎上進行了系統的束流調試和相關性能的評估測試。
4.1 位置分辨率評估
選取主加速器末端的漂移段處的3個相鄰的腔式探頭進行數據的關聯分析從而去除束流抖動對位置分辨率評估的影響,系統組成如圖9所示。
位于CBPM探頭下方的移動平臺可實現水平和垂直方向的移動來模擬束流位置的相對偏移,可進行RF前端增益線性范圍的評估以及位置轉換因子K的標定。
圖10為測試的RF前端增益線性曲線,在束流偏移電中心±2 mm范圍內呈較好的線性,而在大于2 mm時線性度不足,這是受位于隧道內的射頻前置放大器的P1 dB飽和功率所限制,測試結果與設計期望值符合。
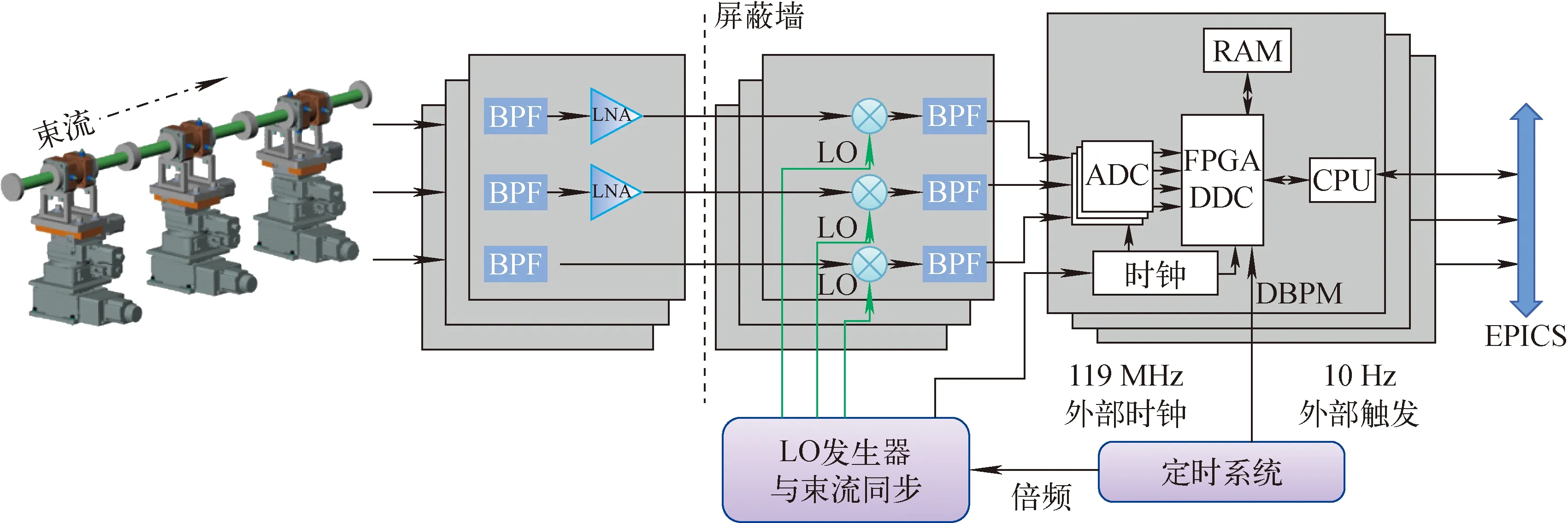
圖9 漂移段束流位置分辨率評估系統組成結構Fig.9 Diagram of beam position resolution evaluation system in drift section
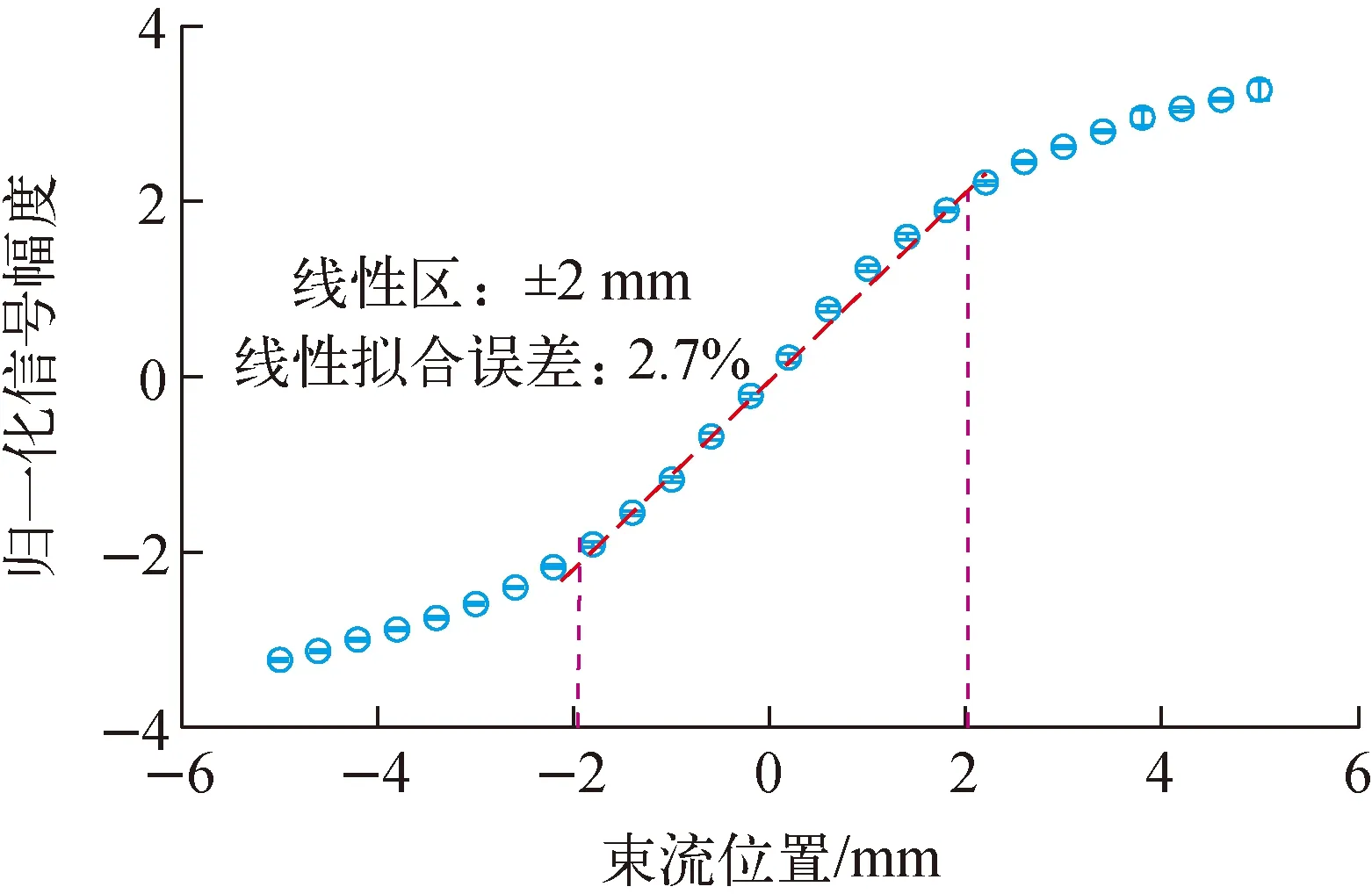
圖10 RF前端的增益線性曲線Fig.10 Gain linear curve of RF front-end
圖11為3個探頭的幾何位置分布及關聯分析的示意圖。由式(4)的幾何關系,CBPM2的位置(U′2)可由CBPM1和CBPM3的位置(U′1和U′3)來預測。假設束流呈直線通過所有BPM,因此可通過CBPM2的測量值(U2)和U′2之間的差異(ΔU)并結合幾何因子GF來計算位置分辨率,如式(5)所示,其中幾何因子可由式(6)計算。

圖11 探頭幾何分布及關聯分析示意圖Fig.11 Schematic of detector geometric distribution and correlation analysis
(4)
δCBPM=GF·STD(Δd)
(5)
(6)
式中:δCBPM為分辨率;Δd為位置垂直方向期望值與測量值之差;STD為相對標準偏差。
結合圖12的K標定結果,在束團電荷量為500 pC、系統的動態范圍在±800 μm的工作條件下,CBPM2垂直方向的測量值與期望值之間的線性關系如圖13所示,殘差分布如圖14所示。
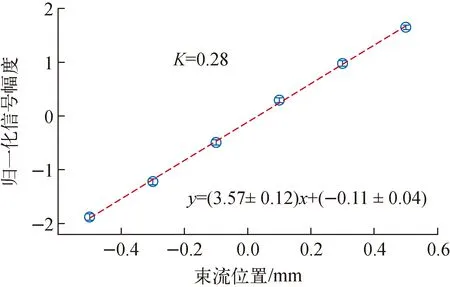
圖12 位置轉換因子標定結果Fig.12 Calibration result of position conversion factor
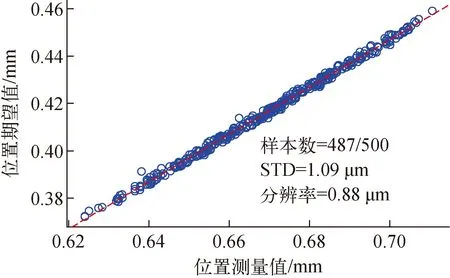
圖13 位置測量值和期望值之間的關系Fig.13 Relationship of measured position and expected values
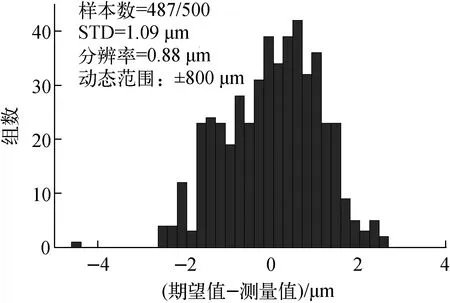
圖14 位置測量值與期望值的殘差分布Fig.14 Residual distribution of measured position and expected values
從束流實驗結果可知,當在束團電荷量為500 pC、系統動態范圍在±800 μm的條件下,測得CBPM系統在垂直方向的位置分辨率可達880 nm,實現了SXFEL對CBPM系統進行位置測量好于1 μm@500 pC±500 μm的指標要求。理論上,若可將系統動態范圍縮小至±500 μm,可實現約550 nm的位置分辨率結果。
4.2 相對電荷量分辨率評估
為評估CBPM的參考腔進行束團電荷量測量的性能,在漂移段選取兩個相鄰的CBPM的參考腔進行數據的關聯分析,從而去除束團電荷量抖動的影響,實驗評估結果如圖15所示。
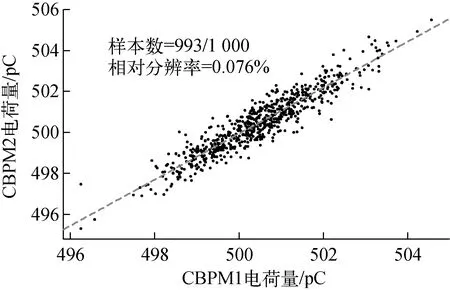
圖15 相對束團電荷量分辨率評估結果Fig.15 Evaluation result of relative bunch charge resolution
圖15為相鄰兩個參考腔進行束團電荷量測量的線性關聯分析結果,評估得到利用參考腔進行束團電荷量測量的分辨率為0.076%,好于0.1%的相對電荷量測量的指標要求。
4.3 束流到達時間分辨率評估
同樣,參考腔的主模TM010模式信號電場也包含著束流到達時間相位信息,因此仍采用相鄰兩個參考腔的數據關聯分析的方法進行束流到達時間分辨率和束流飛行時間分辨率的評估測試,評估結果分別如圖16、17所示。
由評估結果可知,采用CBPM的參考腔進行束流到達時間測量時,分辨率可達到57.2 fs,束流飛行時間分辨率可達約34 fs,好于束流到達時間系統分辨率優于百fs的指標要求。
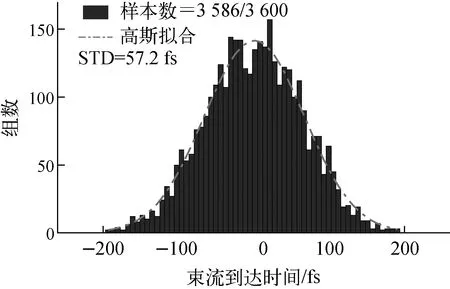
圖16 束團到達時間測量結果的分布直方圖Fig.16 Histogram of beam arriving time
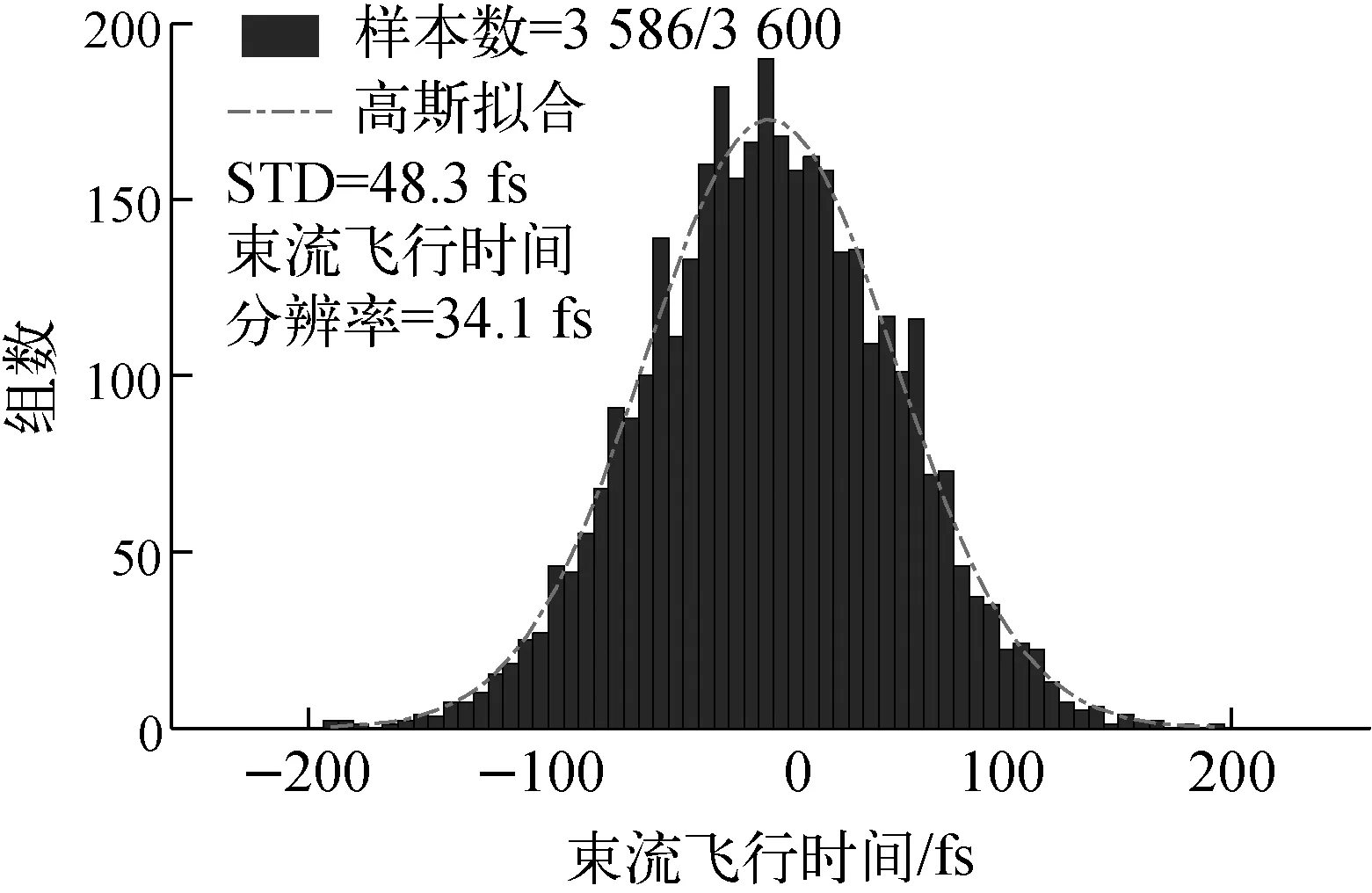
圖17 束團飛行時間測量結果的分布直方圖Fig.17 Histogram of beam flying time
5 結論
本文結合SXFEL波蕩器段對束流位置測量的要求,完成了腔式探頭的物理設計和加工、RF前端的設計和電路搭建、本振信號源的設計、束流信號處理器硬件和軟件的開發,并在國內首次成功搭建了可在線運行的CBPM系統。初步束流實驗測試結果表明該系統在束團電荷量為500 pC、系統動態范圍為±800 μm的條件下,得到了880 nm的位置分辨率評估結果,達到了SXFEL對CBPM系統進行位置測量好于1 μm@500 pC±500 μm的指標要求。利用CBPM的參考腔進行束團電荷量和束流到達時間的測量,在束團電荷量為500 pC的條件下,得到了0.076%的相對電荷量分辨率、57.2 fs的束流到達時間分辨率以及34.1 fs的束流飛行時間分辨率的結果,實現了SXFEL相對束團電荷量分辨率好于0.1%以及束流到達時間系統分辨率好于10-13s的目標。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45