四軸飛行器的建模與仿真分析
2020-10-26 06:51:50廖干洲
機電信息 2020年26期
摘要:四軸飛行器具有可以垂直升降、任意角度靈活移動等特點,并且可以在其機身上搭載不同的器件,如攝像頭、機械手臂等進行功能拓展。現在理想條件下建立了四軸飛行器的動力學模型,從飛行位置和飛行姿態方面反解四軸電機的實際轉速,并通過PD算法控制提高飛行器控制速率,使用Matlab軟件對其進行了仿真。仿真結果表明,該四軸飛行器在理想狀態下能達到精確控制的效果。
關鍵詞:四軸飛行器;動力學模型;位置控制;姿態控制
0 引言
四旋翼飛行器也被稱為四軸飛行器,是一種有4個螺旋槳的飛行器,其螺旋槳分布分為2種類型,分別為十字型和交叉型。此類飛行器可以靈活地實現各種飛行模式,如爬升、懸停、滾轉、俯仰等。相對于傳統的固定翼飛行器,四軸飛行器可以實現更多的飛行動作,并且在制作成本、體積以及控制簡易性上都有無可比擬的優勢。當下四軸飛行器成了一個研究熱點,除了實驗室研究以外,一般的工科大學生或者電子設計愛好者都可以以較低的價格設計完成一個四軸飛行器。
1 坐標系的建立
想要設計四軸飛行器,首先要對其進行動力學建模,為了得到飛行器的數學模型,首先必須根據地面和機體建立2個不同的坐標系,分別為以地面為基礎的地理坐標系和以飛行器本身為基礎的機體坐標系。
1.1 ? ?地理坐標系
地理坐標系O相對于地球表面不動,取東北天方向建立該坐標系,取固定點作為原點,e1、e2、e3分別為一般意義上的x、y、z軸,如圖1所示。
1.2 ? ?機體坐標系
機體坐標系B與飛行器聯系,對于交叉型飛行器來講,坐標原點為飛行器的質心,ox指向1、4號電機的角平分線,規定此方向為正方向;oy指向1、2號電機的角平分線;oz垂直于oxy平面,符合右手法則。
1.3 ? ?機體機械結構
四軸飛行器按照電機的分布類型不同,可分為十字型結構以及交叉型結構,如圖2所示。這2種結構對于控制系統仿真來講區別不大,由于考慮到“X”結構在市面上的應用比較廣泛,參考資料也比較多,本文統一針對“X”結構進行講解。
2 飛行角度
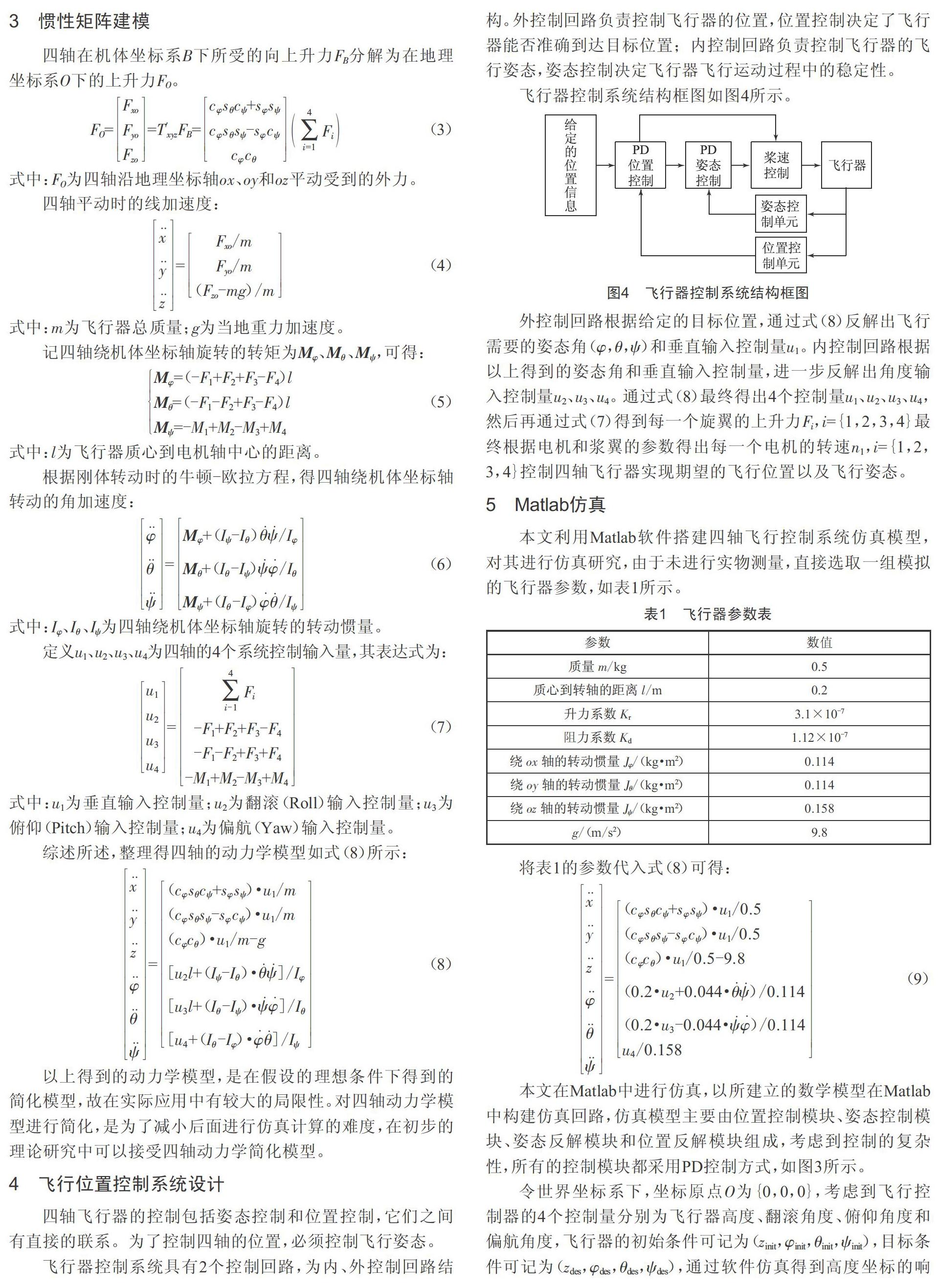
四旋翼飛行器的飛行姿態可以用3個角度表示,分別是翻滾角φ、俯仰角θ、偏航角ψ。
四旋翼飛行器飛行姿態的3種歐拉角示意圖如圖3所示。翻滾角φ(Roll Angle)是沿著翻滾軸(Roll Axis),也就是ox軸轉動的角度,從機體后方往前看,記右轉為正方向,反之為負方向。俯仰角θ(Pitch Angle)是沿著俯仰軸(Pitch Axis),也就是oy軸轉動的角度,從左方往右看,記右轉為正方向,反之為負方向。偏航角ψ(Yaw Angle)是沿著偏航軸(Yaw Axis),也就是oz軸轉動的角度,從機體上方往下看,記右轉為正方向,反之為負方向。
以上得到的動力學模型,是在假設的理想條件下得到的簡化模型,故在實際應用中有較大的局限性。對四軸動力學模型進行簡化,是為了減小后面進行仿真計算的難度,在初步的理論研究中可以接受四軸動力學簡化模型。
4 飛行位置控制系統設計
四軸飛行器的控制包括姿態控制和位置控制,它們之間有直接的聯系。為了控制四軸的位置,必須控制飛行姿態。
飛行器控制系統具有2個控制回路,為內、外控制回路結構。外控制回路負責控制飛行器的位置,位置控制決定了飛行器能否準確到達目標位置;內控制回路負責控制飛行器的飛行姿態,姿態控制決定飛行器飛行運動過程中的穩定性。
飛行器控制系統結構框圖如圖4所示。
外控制回路根據給定的目標位置,通過式(8)反解出飛行需要的姿態角(φ,θ,ψ)和垂直輸入控制量u1。內控制回路根據以上得到的姿態角和垂直輸入控制量,進一步反解出角度輸入控制量u2、u3、u4。通過式(8)最終得出4個控制量u1、u2、u3、u4,然后再通過式(7)得到每一個旋翼的上升力Fi,i={1,2,3,4}最終根據電機和漿翼的參數得出每一個電機的轉速n1,i={1,2,3,4}控制四軸飛行器實現期望的飛行位置以及飛行姿態。
5 Matlab仿真
本文利用Matlab軟件搭建四軸飛行控制系統仿真模型,對其進行仿真研究,由于未進行實物測量,直接選取一組模擬的飛行器參數,如表1所示。
本文在Matlab中進行仿真,以所建立的數學模型在Matlab中構建仿真回路,仿真模型主要由位置控制模塊、姿態控制模塊、姿態反解模塊和位置反解模塊組成,考慮到控制的復雜性,所有的控制模塊都采用PD控制方式,如圖3所示。
令世界坐標系下,坐標原點O為{0,0,0},考慮到飛行控制器的4個控制量分別為飛行器高度、翻滾角度、俯仰角度和偏航角度,飛行器的初始條件可記為(zinit,φinit,θinit,ψinit),目標條件可記為(zdes,φdes,θdes,ψdes),通過軟件仿真得到高度坐標的響應曲線以及3個角度的相應曲線。
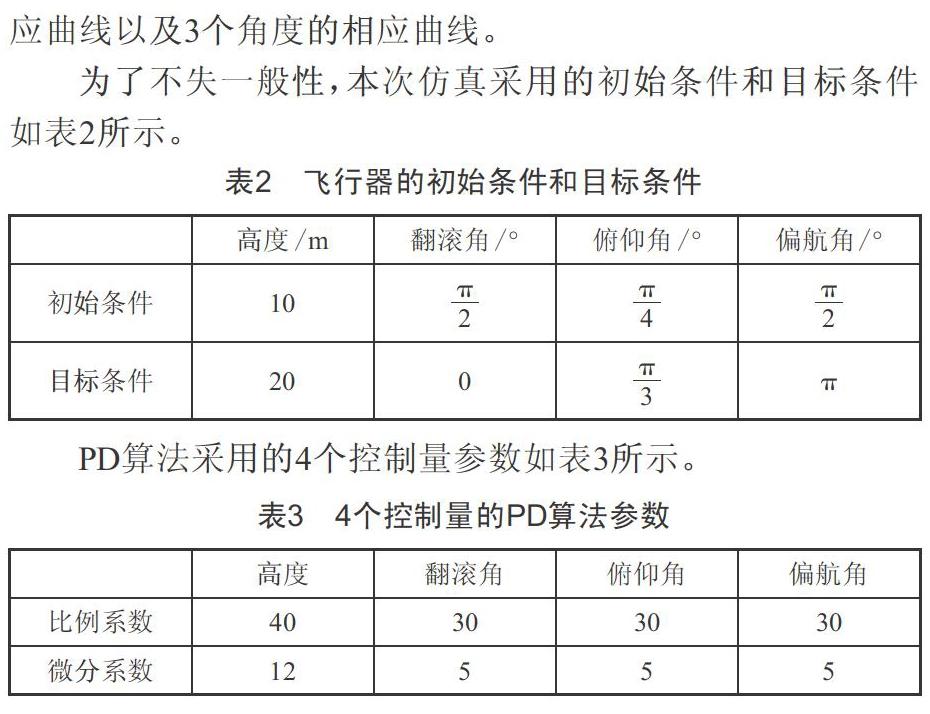
為了不失一般性,本次仿真采用的初始條件和目標條件如表2所示。
PD算法采用的4個控制量參數如表3所示。
圖5(a)為應用PD算法得到的3個歐拉角的響應曲線,為內反饋的姿態控制單元。圖5(b)為高度位置的響應曲線,為外反饋的位置控制單元。為了明顯區別4條曲線,翻轉角、俯仰角、偏航角、高度的初始響應時間分別為1 s、2 s、3 s、4 s。通過曲線可以看到,4個控制量的穩態誤差為0,說明應用PD算法的四軸能在大概1 s內平穩實現目標姿態,到達目標位置。
6 結語
本文根據四軸飛行器的原理,建立了理想狀態下的四軸飛行器動力學模型。四軸飛行器在控制方面,采用了位置控制以及姿態控制的雙回路控制方法以及PD算法,并在Matlab平臺下對其進行了仿真。根據仿真結果可知,該四軸飛行器在理想狀態下能達到精確控制的效果。設計人員后續通過添加對于實際大氣狀態的仿真條件,進一步整定PD算法的參數等,為四軸飛行器的實際制作奠定基礎。
[參考文獻]
[1] 聶博文,馬宏緒,王劍,等.微小型四旋翼飛行器的研究現狀與關鍵技術[J].電光與控制,2007,14(6):113-117.
[2] 龐慶霈.四旋翼飛行器設計與穩定控制研究[D].合肥:中國科學技術大學,2011.
[3] 楊慶華,宋召青,時磊.四旋翼飛行器建模、控制與仿真[J].海軍航空工程學院學報,2009,24(5):499-502.
[4] 王秀萍,張天光.捷聯慣性導航技術[M].北京:國防工業出版杜,2007.
[5] 程學功.四軸飛行器的設計與研究[D].杭州:杭州電子科技大學,2012.
[6] 胡三慶.基于MEMS加速度傳感器的空間運動軌跡追蹤系統設計與實現[D].武漢:華中科技大學,2009.
[7] 李素敏,王杰,宋北光.一種改進的PID控制算法[J].微計算機信息,2006,22(25):40-41.
收稿日期:2020-09-08
作者簡介:廖干洲(1983—),男,廣東人,工學碩士,講師,研究方向:機器學習、控制技術。
