起重機械安全監控系統設計
2020-10-30 06:35:30賈國棟
設備管理與維修 2020年18期
賈國棟
(太原重工股份有限公司起重機分公司,山西太原 030024)
0 引言
在現代工業生產中,起重機械是尤為重要的特種設備之一,主要應用于起重、裝卸、安裝物料的過程中。在實際應用中,由于起重機械具備起重大、起升高的特點,在很大程度上加大了起重機械在應用中出現安全事故的概率。一旦在實際生產、使用中出現不當行為或操作,就極有可能造成嚴重的起重機械安全事故,引起設備受損,甚至導致人員生命安全受到影響。
1 起重機械安全監控系統總體設計方案
1.1 安全監控系統設計要求
在設計起重機械安全監控系統的過程中,必須要依據國家標準《起重機械安全監控管理系統》進行安全設計。在安全監控系統中,主要的組成包括信息采集、處理、顯示單元以及控制輸出單元等,在實際應用中需要具備監控與遠程傳輸功能[1]。
1.2 設計方案
在安全監控系統的設計中,要嚴格遵循國內的安全標準,合理借鑒國外先進的安全監控系統設計方案展開。主要分為3 個模塊:
(1)前置采集模塊。主要由傳感器、微控制器和通信模塊組成,在起重機械的實際應用中起到采集信號的作用,并可以在很大程度上增強信號的抗干擾性,還能夠強化遠距離傳輸能力。通過這一功能可以有效避免信號在傳輸中出現失真情況,加強了安全系統測量的精準性。
(2)機載控制器模塊。由顯示、存儲以及無線通信模塊等組成,主要作用是接收采集模塊發出的信號,并對接收的信號進行處理與分析,實現有效的監控。利用無線模塊并借助顯示屏對結果的顯示,還可以實現遠程監控的功能。
(3)動態穩定性分析模塊。作用主要是進行數據分析,即結合機械的自身參數與監測數據進行科學評估,通過分析其動態穩定性,確定機械的動態穩定性系數,在最終的實際應用中實現對起重機械平衡性功能的準確分析。
2 起重機械穩定性分析
2.1 靜態穩定
起重機械的靜態穩定狀態,指在使用起重機械的過程中,機械所受到的重量與載荷都來自于自身的作用力,而將其他外力產生的作用暫時忽略的狀態。根據起重機械靜態穩定情況下的各種參數分析,可以得到一個度量靜態穩定狀態的穩定參數:

式中 G——機械自重
C——起重機械重心與旋轉中心的距離
L——兩支腿間距離
G吊——吊具的重量
Q——起升載荷的重量
R——工作幅度
2.2 動態穩定
靜態穩定只考慮到起重機械自身力的作用而沒有考慮其他相關的附加傾覆力矩,得到了靜態穩定下的穩定系數,而在實際應用中,起重機械必然會受到一系列的附加力矩影響,結合常見的影響因素如下:
2.2.1 風力附加力矩

式中 P風——風載荷
C——迎風物體體型系數
Kh——高度修正系數
Q0——標準風壓值
S0——迎風面積
實際工作中風向處于變化狀態,會使得重機械的工作在風不穩定的作用下,因而導致傾覆力矩出現。起重機械因風載荷而產生的傾覆力矩為:

式中 P1——風載荷下起重機械機身上的力
h1——風載荷下起重機械機身上的力臂
P2——風載荷下吊臂上的力
h2——風載荷下吊臂上的力臂
2.2.2 慣性附加力矩

式中 G吊——吊具的重量
Q——起升載荷的重量
v1——平穩起吊時的速度
v2——起吊初速度
t1——起吊時長
起重機械的起吊載荷加速時會有一個突變,從而在重物上產生慣性力,受到慣性力的影響也會增大傾覆力矩,影響穩定性。慣性附加力矩為:

式中 R——工作幅度
L——兩支腿之間的距離
2.2.3 變幅的影響

式中 v3——變幅初速度,一般為0
v4——平穩變幅時的速度
t2——變幅啟、制動時長
具有變幅機構的起重機械在向下變幅或向上變幅制動時,就會在起重機械吊臂端產生與之垂直的力,從而使傾覆力矩增大。變幅附加力矩為:

式中 h2——風載荷下吊臂上的力臂
2.2.4 向心力的影響

式中 n——起重機械回轉速度

式中 h0——吊臂端部到起吊重物的距離
當以旋轉機構中心為軸使機械的變幅機構以R 為半徑展開圓周運動,就會在吊臂的端產生向心力,從而間接增大傾覆力矩。向心力產生的傾覆力矩為:

式中 h2——風載荷下吊臂上的力臂
2.3 綜合分析
判斷起重機械運行過程中具有的動態穩定性,從而以動態穩定性系數對起重機械的穩定性進行判斷,得到以下公式:

其中,k 為附加載荷下起重機械的動態穩定系數,其他為不同附加力矩的相關參數。
從理論上分析,只需要使動態穩定性系數,即:穩定力矩/傾覆力矩≥1,就可以確保起重機械處于正常運行狀態,并將起重機械在實際運行中所處的環境和實際操作的復雜性考慮其中,結合會導致附加力矩產生波動的因素,嚴格按照國家安全標準的規定進行分析[2]。
3 起重機械安全監控系統設計與實現
3.1 硬件設計
在設計硬件的過程中,一般需考慮信號采集模塊與機載控制器模塊的設計:①因為起重機械結構復雜、監測點到控制室遠且跨度大,容易導致長距離的傳輸中出現信號失真或缺失的情況,需要在靠近監測點的位置裝設前置采集模塊[3];②安裝在起重機械的控制室內的機載控制器模塊,負責接收前置采集模塊傳遞的信號,分析采集到的數據,通過一系列的計算得到最終數據,通過無線通信模塊確保遠程監控的有效展開。
3.2 軟件設計
從起重機械的安全監控系統設計整體流程來看,系統的軟件設計主要包括主程序與穩定性分析兩部分。在實際應用中,主要由主程序接收系統運行中檢測到的實時數據,而后的數據發送則需要借助無線模塊進行,傳輸的數據需要準確地傳遞到穩定性分析程序中,從而展開科學計算(圖1)。通過采用這一分析方案,可以在確保精確度的同時有效計算起重機械的穩定性,將準確數據應用于安全監控系統中,確保起重機械應用的安全性。
4 總結
在實際應用起重機械的過程中,為進一步確保使用的安全性,科學嚴謹地設計安全監控系統是必不可少的。經過以上對設計方案的分析與整理,進一步明確在起重機械的實際應用中,既要考慮起重機自身的負載作用力,也需要結合動態附加傾覆力矩,綜合分析相關影響因素,并將其考慮到安全監控系統的設計當中,最終確保安全監控系統的有效性,滿足起重機械安全監控要求。
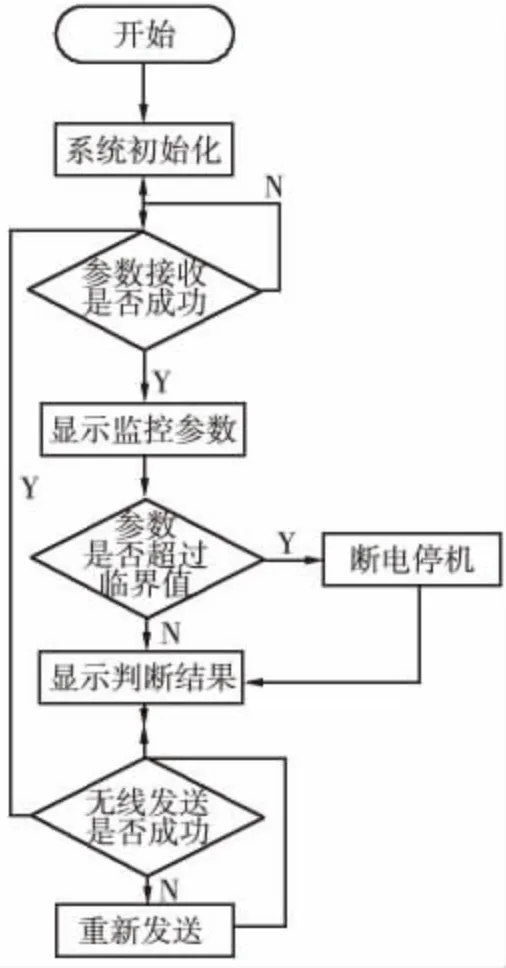
圖1 主程序流程
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22