行星隕石坑檢測(cè)算法研究綜述
2020-10-31 06:48:06張翰墨
載人航天 2020年5期
胡 濤,賀 亮,曹 濤,韓 宇,張翰墨
(1. 上海航天控制技術(shù)研究所,上海201109; 2. 上海市空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,上海201109)
1 引言
隨著航天技術(shù)的發(fā)展,行星探測(cè)已經(jīng)逐漸成為國(guó)際航天領(lǐng)域的熱點(diǎn),其中行星隕石坑檢測(cè)一直是其中重要的研究方向之一。 許多小天體被認(rèn)為保存有宇宙形成初期的古老物質(zhì),研究行星隕石坑是確定太陽(yáng)系中行星體地質(zhì)年代信息,了解宇宙起源的重要途徑。 行星隕石坑檢測(cè)可應(yīng)用于行星著陸、行星地質(zhì)研究、行星未知領(lǐng)域探索以及探測(cè)器視覺導(dǎo)航等諸多領(lǐng)域。
行星隕石坑檢測(cè)的重點(diǎn)在于隕石坑生命周期中的侵蝕、掩埋、覆蓋和轉(zhuǎn)化問題。 由于彈坑的復(fù)雜性,其形狀、大小、重疊和退化都有很大的變化,使得隕石坑檢測(cè)算法(Crater Detection Algorithms,CDAs)的設(shè)計(jì)非常困難。 然而隨著人工智能神經(jīng)網(wǎng)絡(luò)的興起,機(jī)器學(xué)習(xí)在數(shù)據(jù)分析、圖像分類與識(shí)別以及目標(biāo)檢測(cè)等方面大放異彩[1],特別是深度學(xué)習(xí)在隕石坑檢測(cè)中的應(yīng)用,大大提高了檢測(cè)效率。
目前隕石坑檢測(cè)方法可分為3 類:利用地形和光譜數(shù)據(jù)進(jìn)行地質(zhì)信息分析、傳統(tǒng)視覺處理算法和機(jī)器學(xué)習(xí)方法。 Ye 等[2]得到隕石坑位置和直徑信息,利用光譜圖像對(duì)隕石坑附件的巖石地質(zhì)元素進(jìn)行分析,剔除判斷錯(cuò)誤的隕石坑,并將正確的隕石坑分類為簡(jiǎn)單型和復(fù)雜型。 由于隕石坑的地質(zhì)元素變化較大,存在不確定性,不利于隕石坑的自動(dòng)檢測(cè),應(yīng)用較少。 目前應(yīng)用較多的方法是傳統(tǒng)視覺處理算法和機(jī)器學(xué)習(xí)算法,本文針對(duì)這2 種方法展開詳細(xì)論述,調(diào)研現(xiàn)有的針對(duì)月球、火星等行星隕石坑的檢測(cè)方法,將傳統(tǒng)視覺的隕石坑檢測(cè)算法分為基于邊緣、陰影和區(qū)域3 個(gè)方面進(jìn)行闡述;從數(shù)據(jù)集、網(wǎng)絡(luò)結(jié)構(gòu)和評(píng)價(jià)指標(biāo)的角度,重點(diǎn)分析了深度學(xué)習(xí)隕石坑檢測(cè)算法。 此外,根據(jù)目前隕石坑檢測(cè)算法存在的問題,提出深度學(xué)習(xí)在隕石坑檢測(cè)中未來(lái)的發(fā)展方向。
2 傳統(tǒng)視覺檢測(cè)算法
隕石坑的形狀、輪廓等特征對(duì)傳統(tǒng)視覺檢測(cè)算法的效果至關(guān)重要,大多數(shù)隕石坑是由流星撞擊形成的,隕石坑形成的第一步是行星之間幾乎瞬間的碰撞。 最簡(jiǎn)單的隕石坑是碗狀的,有一對(duì)新月狀的高亮和陰影區(qū)域,邊緣呈向外噴射狀,地形剖面大致呈二次型。 隕石坑越大,凹陷底部就越平坦(圖1(a));當(dāng)流星質(zhì)量很重或速度很快時(shí),壓縮階段后的反彈效應(yīng)在隕石坑中形成一個(gè)中心峰,構(gòu)成一個(gè)復(fù)雜的隕石坑(圖1(b));當(dāng)坑很大時(shí),地震效應(yīng)和土壤的水平松弛可以造成多個(gè)邊緣(圖1(c))。
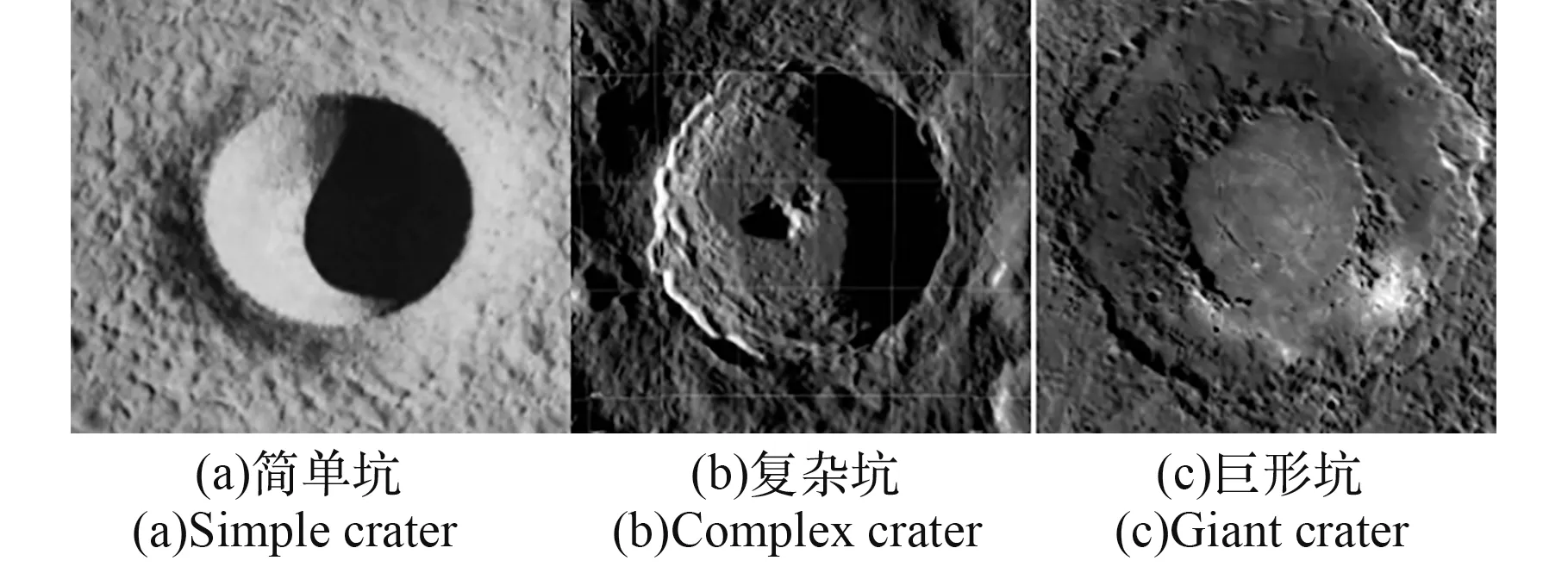
圖1 不同隕石坑種類Fig.1 Different types of craters
對(duì)于傳統(tǒng)圖像處理隕石坑檢測(cè)方法主要分為基于邊緣、基于陰影和基于區(qū)域3 種,分類具體如下:
1)基于邊緣的方法利用隕石坑形狀較簡(jiǎn)單,一般呈圓形或橢圓形的特點(diǎn),對(duì)其進(jìn)行輪廓擬合,重建典型的隕石坑形狀。 Johnson 等[3]在NEAR任務(wù)的隕石坑檢測(cè)中應(yīng)用Hough 變換的橢圓檢測(cè),能夠取得80%的準(zhǔn)確率。 Hough 變換是從圖像空間到參數(shù)空間的一種方法,稱為Hough 空間。 變換的目的是尋找最佳的參數(shù),以適合一個(gè)選定的幾何解析公式。 Hough 空間的維數(shù)與搜索參數(shù)的數(shù)目一樣多。 對(duì)于圓,有3 個(gè)維度( x、y 位置和r 半徑);而橢圓參數(shù)的數(shù)目是5 個(gè),將隕石坑邊緣擬合為典型形狀,復(fù)雜度隨著參數(shù)的增加而急劇增加。 Leroy 等[4]提出一種基于投票機(jī)制的多尺度橢圓擬合方法,將圖像中檢測(cè)到的隕石坑與從三維模型中投射出的隕石坑進(jìn)行匹配,得到兩者之間的最佳變換,該方法在隕石坑密集的區(qū)域能夠取得較好的效果。 Cheng 等[5]利用Canny 算子分段檢測(cè)隕石坑邊緣曲線,并將屬于同一隕石坑的邊緣劃分到一組,再進(jìn)行橢圓擬合,能夠獲得90%的準(zhǔn)確率。
2)基于陰影的隕石坑檢測(cè)方法是在太陽(yáng)高度角和光照強(qiáng)度的影響下,隕石坑邊緣會(huì)出現(xiàn)不同程度的陰影區(qū)域,雖然隕石坑的一部分邊緣信息會(huì)被遮擋,造成視覺模糊,但相同的陰影和隕石坑出現(xiàn)了一一對(duì)應(yīng)的關(guān)系,因此可以通過(guò)檢測(cè)圖像中的陰影區(qū)域達(dá)到隕石坑檢測(cè)的目的。 郭烈等[6]首先采用了閾值分割方法對(duì)地面環(huán)境的隕石坑陰影進(jìn)行閾值分割,然后結(jié)合形態(tài)學(xué)濾波算法和閾值面積消除法濾除一些噪聲,最后對(duì)所得到的二值圖像進(jìn)行輪廓提取。 Kaufmann 等[7]使用gamma 校正后閾值分割出陰影區(qū)域,并賦予陰影質(zhì)心二進(jìn)制描述符,再與三維高程數(shù)據(jù)進(jìn)行匹配,實(shí)現(xiàn)飛行器的圖像導(dǎo)航。
3)根據(jù)隕石坑的特征,在太陽(yáng)照射的陽(yáng)面將出現(xiàn)亮區(qū)域,在未照到的陰面將出現(xiàn)陰影區(qū)域,暗區(qū)域的外邊緣呈現(xiàn)圓弧[8],導(dǎo)致隕石坑通常亮區(qū)域和暗區(qū)域成對(duì)存在,故基于區(qū)域的檢測(cè)方法可以利用亮暗區(qū)域成對(duì)存在來(lái)檢測(cè)隕石坑。 Urbach等[9]同時(shí)處理圖像的高光和陰暗特征,目標(biāo)是消除所有與隕石坑無(wú)關(guān)的特征,剩下的高光和陰暗特征相互匹配,以標(biāo)記可能是隕石坑的區(qū)域,最終能達(dá)到70%的檢出率。 丁萌等[10]利用區(qū)域生長(zhǎng)分別提取隕石坑亮、暗兩區(qū)域,取得了較好的效果。
通過(guò)視覺領(lǐng)域的特征提取算法從行星表面的灰度圖像中提取與隕石坑相關(guān)的特征(比如邊緣、斑點(diǎn)、角點(diǎn)和紋理等)來(lái)表征,該方法雖然取得了很好的效果,但是由行星著陸或地質(zhì)工作而進(jìn)行的研究同時(shí)需要探測(cè)直徑1 km 以下級(jí)別的許多小型隕石坑,當(dāng)小尺寸的隕石坑和大尺寸的隕石坑在一起探測(cè)時(shí),傳統(tǒng)視覺方法缺乏適用性。
3 機(jī)器學(xué)習(xí)檢測(cè)算法
機(jī)器學(xué)習(xí)可以在隕石坑檢測(cè)計(jì)數(shù)流程的不同步驟(從獲取包含隕石坑的圖像到輸出隕石坑位置)上使用,包括支持向量機(jī)(Support Vector Machine,SVM)、決策樹、特征提取增強(qiáng)算法、主成分分析法和深度學(xué)習(xí)方法,如圖2 所示。

圖2 機(jī)器學(xué)習(xí)隕石坑檢測(cè)算法Fig.2 Machine learning crater detection algorithm
近年來(lái)出現(xiàn)了以YOLO[11](You Only Look Once)、SSD[12](Single Shot MultiBox Detector)為代表的one-stage 深度學(xué)習(xí)框架和以R-CNN[13]、Fast-RCNN[14]、Faster-RCNN[15]、Mask RCNN[16]為代表的two-stage 深度學(xué)習(xí)框架。 因此利用卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Networks,CNN)和循環(huán)神經(jīng)網(wǎng)絡(luò)(Rerrent Neural Network,RNN)等深層神經(jīng)網(wǎng)絡(luò)已成為從所有可用數(shù)據(jù)中確定復(fù)雜決策函數(shù)的首選方法。 CNN 設(shè)計(jì)自己的表示特征,減輕了人類開發(fā)復(fù)雜預(yù)處理算法和人工輸入特征的需要,這些網(wǎng)絡(luò)結(jié)構(gòu)能夠成功地將出現(xiàn)在多個(gè)尺度上的物體分類并識(shí)別[17]。 鄭磊等[18]采用CNN 網(wǎng)絡(luò)結(jié)合非極大值抑制算法對(duì)月面大型隕石坑進(jìn)行識(shí)別。 利用機(jī)器學(xué)習(xí)來(lái)進(jìn)行檢測(cè)包括隕石坑分類和隕石坑分割定位。 分類只是將每個(gè)候選隕石坑提交給網(wǎng)絡(luò)進(jìn)行評(píng)價(jià),而分割定位的輸入為包含多個(gè)隕石坑的圖像,每個(gè)像素被分類為是否屬于隕石坑邊緣。 隕石坑的邊緣像素會(huì)形成粗略的圓形或橢圓形,然后可以用于檢測(cè)定位,如圖3 所示。

圖3 機(jī)器學(xué)習(xí)中隕石坑分類和分割的對(duì)比圖[19]Fig.3 Comparison of classification and segmentation with machine learning[19]
3.1 深度學(xué)習(xí)隕石坑檢測(cè)方法
卷積神經(jīng)網(wǎng)絡(luò)是目前深度學(xué)習(xí)技術(shù)領(lǐng)域中非常具有代表性的神經(jīng)網(wǎng)絡(luò)之一,在圖像分析和處理領(lǐng)域取得了眾多突破性的進(jìn)展。 卷積神經(jīng)網(wǎng)絡(luò)是一種多層的監(jiān)督學(xué)習(xí)神經(jīng)網(wǎng)絡(luò),隱含層的卷積層和池化層是實(shí)現(xiàn)卷積神經(jīng)網(wǎng)絡(luò)特征提取功能的核心模塊。 通過(guò)采用梯度下降法最小化損失函數(shù)對(duì)網(wǎng)絡(luò)中的權(quán)重參數(shù)逐層反向調(diào)節(jié),通過(guò)頻繁的迭代訓(xùn)練提高網(wǎng)絡(luò)的精度。 緊接著全連接層的輸入是由卷積層和池化層進(jìn)行特征提取得到的特征圖像。 最后一層輸出層是一個(gè)分類器,可以采用邏輯回歸、Softmax 回歸甚至是支持向量機(jī)對(duì)輸入的隕石坑圖像進(jìn)行分類。
利用深度學(xué)習(xí)卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行模型訓(xùn)練首先是隕石坑數(shù)據(jù)集的輸入,這是非常重要的環(huán)節(jié)[20],目前的常用行星隕石坑數(shù)據(jù)集如表1 所示,數(shù)據(jù)集的類型有可見光數(shù)據(jù)、數(shù)字高程模型(Digital Elevation Model,DEM)、數(shù)字地形模型(Digital Terrain Model,DTM)和紅外數(shù)據(jù),如圖4所示。 使用可見光數(shù)據(jù)進(jìn)行隕石坑檢測(cè)的主要缺點(diǎn)是光照條件的多樣性,太陽(yáng)高度角和光照強(qiáng)度的不同可能使赤道附近的隕石坑與兩極附近的隕石坑看起來(lái)非常不同,這樣會(huì)造成數(shù)據(jù)集之間的光照出現(xiàn)顯著的變化;數(shù)字高程模型和數(shù)字地形模型數(shù)據(jù)不需要考慮光的角度;而紅外數(shù)據(jù),如火星THEMIS 日間紅外圖像集部分解決了光照條件問題。 Silburt 等[27]利用數(shù)字高程模型和數(shù)字地形模型數(shù)據(jù),此數(shù)據(jù)類型不存在陰影問題,因?yàn)閮H有每個(gè)像素的高程數(shù)據(jù)。 由于隕石坑圓形的規(guī)則性和對(duì)稱性,這種類型數(shù)據(jù)在探測(cè)隕石坑方面非常有效,Yamamoto 等[28]也在非CNN 方法中利用了這種對(duì)稱性,這類數(shù)據(jù)的最大缺點(diǎn)是分辨率的限制,并且不適用于所有行星體。
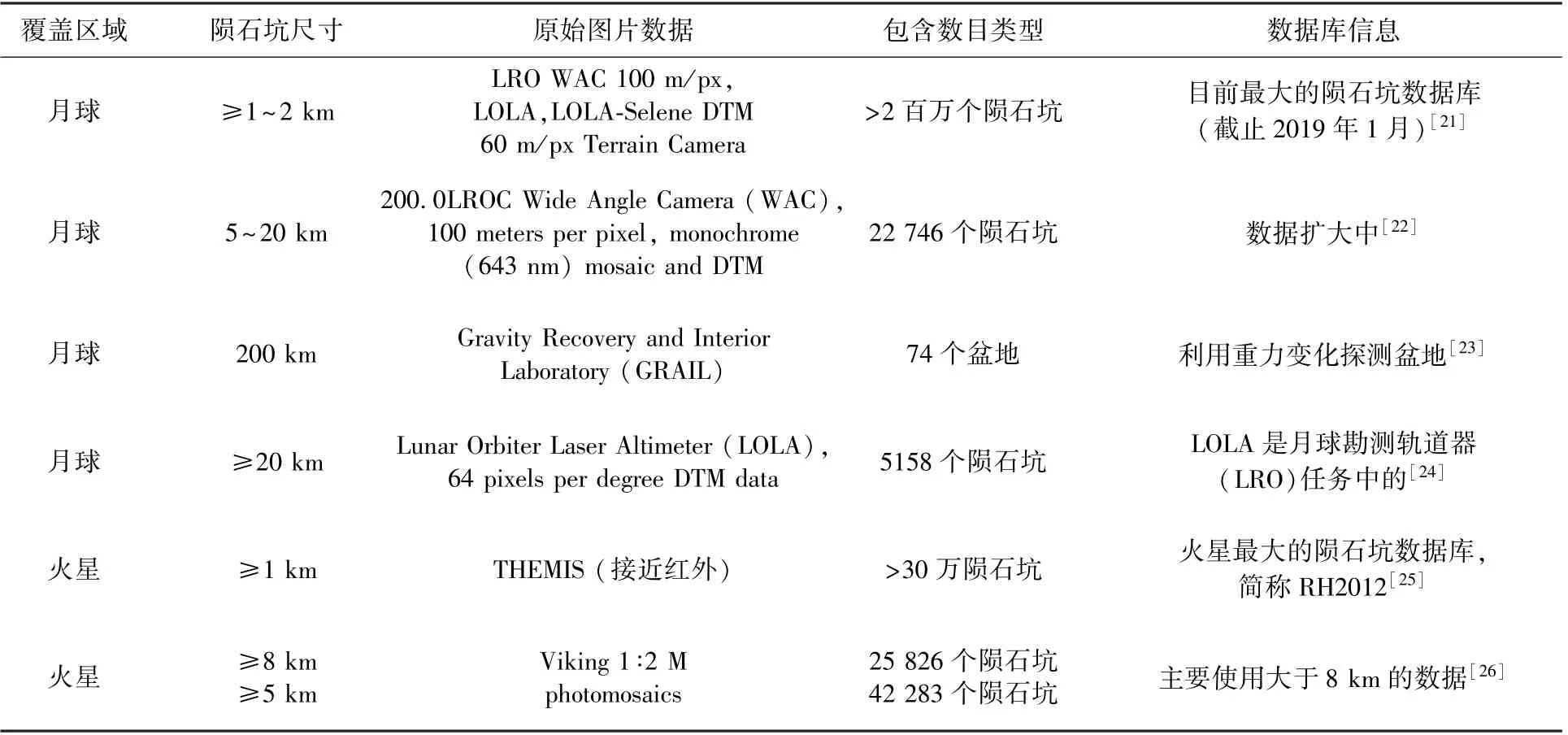
表1 行星體隕石坑位置數(shù)據(jù)庫(kù)Table 1 Planetary crater location databases

圖4 DEM、紅外和可見光隕石坑數(shù)據(jù)[20]Fig.4 Examples of DEM, infrared, and visible light images of craters[20]
在分類方法中,首先對(duì)候選隕石坑區(qū)域進(jìn)行預(yù)處理,然后將每個(gè)候選隕石坑提交給網(wǎng)絡(luò)進(jìn)行評(píng)價(jià)。 Palafox 等[29]將5 個(gè)卷積層架構(gòu)并行運(yùn)行組成MarsNet,并在HiRISE 數(shù)據(jù)集上和SVM 進(jìn)行比較,取得的效果比SVM 更加優(yōu)越。 在分割+定位方法中,輸入整個(gè)圖像,算法將圖像分割成塊,不考慮隕石坑的位置,然后識(shí)別候選隕石坑,對(duì)候選隕石坑進(jìn)行后處理并標(biāo)出位置,再利用傳統(tǒng)的計(jì)算機(jī)視覺方法,如模板匹配,可以識(shí)別圓形形狀并輸出位置和半徑。 DeLatte 等[30]和Silburt等[27]都使用了進(jìn)行U-Net 的分割網(wǎng)絡(luò)(圖5),后者還使用遷移學(xué)習(xí)將模型應(yīng)用到水星隕石坑的檢測(cè)當(dāng)中。 利用分割隕石坑檢測(cè),計(jì)數(shù)圖像在輸入網(wǎng)絡(luò)之前不需要經(jīng)過(guò)預(yù)處理成較小的候選隕石坑區(qū)域,可以實(shí)現(xiàn)自動(dòng)定位。
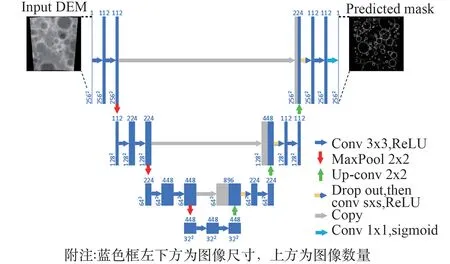
圖5 基于UNET 的網(wǎng)絡(luò)結(jié)構(gòu)[31]Fig. 5 Convolutional neural network architecture based on UNET[31]
Emami 等[31]采用Faster R-CNN 來(lái)進(jìn)行月球隕石坑的檢測(cè),F(xiàn)aster R-CNN 中的區(qū)域候選網(wǎng)絡(luò)(Region Proposal Network,RPN)以最后一個(gè)卷積層的特征映射為輸入,輸出一組對(duì)象可能位置的區(qū)域。 RPN 首先通過(guò)在輸入的不同位置上覆蓋一個(gè)小窗口,并將這些區(qū)域反饋到回歸層和分類層中,以獲得對(duì)象分?jǐn)?shù)和優(yōu)化的對(duì)象位置,從而生成候選區(qū)域;然后目標(biāo)區(qū)域?qū)訉⒛繕?biāo)得分較高的區(qū)域方案轉(zhuǎn)化為固定大小的特征圖,由目標(biāo)檢測(cè)網(wǎng)絡(luò)進(jìn)行分類;最終該網(wǎng)絡(luò)輸出分類標(biāo)簽和目標(biāo)邊界框位置,并在測(cè)試圖像上可以獲得90%以上的準(zhǔn)確率。
3.2 其他的機(jī)器學(xué)習(xí)檢測(cè)方法
其他的機(jī)器學(xué)習(xí)方法也被應(yīng)用于隕石坑的檢測(cè)中,包括支持向量機(jī)和決策樹[32]。 SVM 的基本思想是找到一個(gè)超平面,該超平面以最佳方式將正負(fù)樣本分開,其中最優(yōu)性由平面距離的大小來(lái)定義,即當(dāng)映射到超平面的法向量上時(shí),正負(fù)樣本之間的最小距離。 這些和其他早期的機(jī)器學(xué)習(xí)研究都屬于手動(dòng)設(shè)計(jì)的特征。
在大多數(shù)方法中,候選隕石坑必須在運(yùn)行機(jī)器學(xué)習(xí)算法之前進(jìn)行定位。 因此這些位置是先驗(yàn)的,但隕石坑或非隕石坑的標(biāo)簽不是先驗(yàn)的。 Urbach 等[9]使用C4.5 算法構(gòu)建決策樹分類器來(lái)識(shí)別候選區(qū)域中的隕石坑,如圖6 所示。 C4.5 算法用信息增益率選擇特征,在樹的構(gòu)造過(guò)程中會(huì)進(jìn)行剪枝操作優(yōu)化,能夠自動(dòng)完成對(duì)連續(xù)屬性的離散化處理,在選擇分割屬性的時(shí)候選擇信息增益率最大的屬性[32]。

圖6 利用決策樹算法進(jìn)行分類[9]Fig.6 Classification with decision tree algorithm[9]
Wang 等[33]使用Haar-like 特征描述樣本,采用自適應(yīng)增強(qiáng)方法對(duì)有用特征進(jìn)行選擇和組合,使用級(jí)聯(lián)結(jié)構(gòu)提高處理效率。 增強(qiáng)方法只需在隕石坑訓(xùn)練集的不同隨機(jī)子集上訓(xùn)練多個(gè)分類器,對(duì)其決策進(jìn)行平均或多數(shù)投票,然后進(jìn)行組合生成復(fù)合分類器,提高了分類的準(zhǔn)確性和可靠性。Machado 等[34]使用Haar 紋理特征和支持向量機(jī)檢測(cè)月球的隕石坑數(shù)據(jù)。 Wetzler 等[35]使用支持向量機(jī)對(duì)火星上的隕石坑進(jìn)行檢測(cè)定位,并與Hough 變換、人工檢測(cè)進(jìn)行了比較,實(shí)驗(yàn)顯示支持向量機(jī)效果最好。
3.3 評(píng)價(jià)指標(biāo)
隕石坑檢測(cè)中常用查準(zhǔn)率P 和查全率R 作為評(píng)估檢測(cè)效果的重要指標(biāo)[36],為了平衡查準(zhǔn)率和查全率,一個(gè)常用的指標(biāo)就是查準(zhǔn)率和查全率的調(diào)和平均數(shù),記為F1[37-38],具體見式(1)。

式中,Tp為人工注釋集與網(wǎng)絡(luò)生成的列表之間的正確匹配, Fn為標(biāo)簽列表中未找到的隕石坑,F(xiàn)p為已識(shí)別但與標(biāo)注列表不匹配的隕石坑。
由于光照和隕石坑陰影的影響,樣本數(shù)據(jù)集可能會(huì)出現(xiàn)不同程度的噪聲,這種干擾會(huì)使模型過(guò)分記住特征,而忽略了真實(shí)的輸入輸出間的關(guān)系,造成過(guò)擬合。 在這種情況下,可以使用交叉驗(yàn)證來(lái)減少模型的過(guò)擬合[39],即將隕石坑數(shù)據(jù)樣本切割成較小子集,先將一個(gè)子集作為訓(xùn)練集訓(xùn)練,其它子集做測(cè)試集,用來(lái)驗(yàn)證CDA 的性能。 這樣重復(fù)運(yùn)用隨機(jī)產(chǎn)生的子樣本進(jìn)行訓(xùn)練和驗(yàn)證,每次隨機(jī)驗(yàn)證一次,不僅可以減少過(guò)擬合,還可以克服數(shù)據(jù)集較少的缺點(diǎn)。
為了評(píng)估分類性能,根據(jù)學(xué)者們隕石坑檢測(cè)結(jié)果的查全率和查準(zhǔn)率,圖7 給出了VGGNet[40]、GoogleNet[41]和ResNet[42]3 種卷積神經(jīng)網(wǎng)絡(luò)在隕石坑測(cè)試集上的分類結(jié)果。 這3 個(gè)分類器在測(cè)試集上都表現(xiàn)得很好。 雖然3 個(gè)網(wǎng)絡(luò)正確地分類了大多數(shù)陽(yáng)性樣本,但VGGNet 的召回率略高于其他2 個(gè)網(wǎng)絡(luò),召回率為99.23%。 表2 為傳統(tǒng)圖像隕石坑檢測(cè)與深度學(xué)習(xí)卷積神經(jīng)網(wǎng)絡(luò)在各自的數(shù)據(jù)集進(jìn)行的測(cè)試,評(píng)價(jià)方法存在差異,難以歸一化,但是仍可以看出傳統(tǒng)視覺檢測(cè)在精度方面大大落后于深度學(xué)習(xí)網(wǎng)絡(luò)檢測(cè)方法,而各個(gè)訓(xùn)練網(wǎng)絡(luò)模型之間的精度卻相差不大,都能達(dá)到近似90%的精度。

圖7 卷積神經(jīng)網(wǎng)絡(luò)在數(shù)據(jù)集上的分類表現(xiàn)[31]Fig.7 Classification performance of deep CNNs on crater detection test set[31]

表2 傳統(tǒng)圖像檢測(cè)與深度學(xué)習(xí)檢測(cè)對(duì)比Table 2 Comparison of traditional image detection and deep learning detection
4 對(duì)深度學(xué)習(xí)檢測(cè)隕石坑的技術(shù)展望
1)擴(kuò)大數(shù)據(jù)集的種類和范圍,可以使用紅外圖像數(shù)據(jù)和DEM 數(shù)據(jù)結(jié)合可見光圖像數(shù)據(jù),增加數(shù)據(jù)集的范圍,采集包括行星高低緯度、不同經(jīng)度、各種地貌條件下的隕石坑數(shù)據(jù)。 一般的深度學(xué)習(xí)訓(xùn)練網(wǎng)絡(luò)都是以隕石坑正負(fù)樣本訓(xùn)練集進(jìn)行二分類,使用附加的注釋數(shù)據(jù)集,添加更多的標(biāo)簽種類,可以使用這些技術(shù)檢測(cè)更多的對(duì)象,如巖石、山坡等其他障礙(圖8),對(duì)于載人登月、行星著陸探測(cè)自主障礙檢測(cè)規(guī)避具有非常重要的意義。

圖8 月球表面障礙[30]Fig.8 Obstacles on lunar surface[30]
2)生成性對(duì)抗網(wǎng)絡(luò)[45](Generative Adversarial Networks,GAN),利用零和博弈的思想,從一段隨機(jī)數(shù)中生成逼真的圖像,用于產(chǎn)生額外的訓(xùn)練數(shù)據(jù),以避免過(guò)度擬合,而且GAN 有助于改善不同地形環(huán)境之間的特征變換。
3)遷移學(xué)習(xí)是深度學(xué)習(xí)中的一個(gè)重要趨勢(shì),如果缺乏更廣泛的隕石坑數(shù)據(jù)集,可以使用機(jī)器學(xué)習(xí)中的遷移學(xué)習(xí),通過(guò)使用在其他大型數(shù)據(jù)集上預(yù)訓(xùn)練好的網(wǎng)絡(luò)作為基礎(chǔ),在對(duì)隕石坑進(jìn)行額外的訓(xùn)練,并且隨著在新的數(shù)據(jù)集上進(jìn)行訓(xùn)練而改進(jìn)。 例如,Norman 等[46]使用在ImageNet 數(shù)據(jù)集預(yù)先訓(xùn)練的GoogleNet-OverFeat 探測(cè)火星上的隕石坑。 從頭開始的訓(xùn)練需要更多的參數(shù)調(diào)整,通過(guò)使用預(yù)先訓(xùn)練或部分預(yù)先訓(xùn)練的網(wǎng)絡(luò),可以減少訓(xùn)練時(shí)間,并且可以使用更多類型的網(wǎng)絡(luò)體系結(jié)構(gòu)。
4)二階梯度優(yōu)化。 目前,無(wú)論是從理論還是應(yīng)用層面來(lái)說(shuō),機(jī)器學(xué)習(xí)中的優(yōu)化都是以隨機(jī)梯度下降等一階梯度方法為主,常見的一階最優(yōu)化器,有Adam、AdaGrad 以及SGD +Momentum。 而二階梯度,相當(dāng)于梯度的梯度,加快了收斂速度,Anil 等[47]提出的二階梯度優(yōu)化方法Shampoo,大大加快了模型的訓(xùn)練速度,若能應(yīng)用于隕石坑檢測(cè)的深度學(xué)習(xí)模型中,會(huì)提高其檢測(cè)速度,節(jié)省大量時(shí)間。
5)云計(jì)算提供了一個(gè)與這些大數(shù)據(jù)集合作的機(jī)會(huì),特別是對(duì)于那些無(wú)法訪問超級(jí)計(jì)算機(jī)的研究人員,先進(jìn)的深度學(xué)習(xí)網(wǎng)絡(luò)框架可以同時(shí)訪問這些遠(yuǎn)程資源并執(zhí)行。
5 小結(jié)
傳統(tǒng)視覺檢測(cè)方法較簡(jiǎn)單,利用灰度和紋理等特征進(jìn)行一系列像素操作,可以為深度學(xué)習(xí)網(wǎng)絡(luò)的預(yù)處理提供支持,從而通過(guò)混合的方法來(lái)處理隕石坑數(shù)據(jù),這樣既可以降低網(wǎng)絡(luò)對(duì)功耗、內(nèi)存和訓(xùn)練工作方面的要求,還能提高運(yùn)行速度。
行星地質(zhì)學(xué)者和機(jī)器學(xué)習(xí)學(xué)者之間進(jìn)行合作,將有助于促進(jìn)隕石坑探測(cè)方式的重大研究和改進(jìn),特別是在進(jìn)行聯(lián)合跨學(xué)科項(xiàng)目時(shí),一些學(xué)者正在使用卷積神經(jīng)網(wǎng)絡(luò)等技術(shù)來(lái)允許算法發(fā)展自己的特性。 隨著深度學(xué)習(xí)領(lǐng)域的論文數(shù)量和研究方法呈指數(shù)增長(zhǎng),隕石坑檢測(cè)識(shí)別可以從新的研究中受益。 經(jīng)過(guò)適當(dāng)訓(xùn)練的深度神經(jīng)網(wǎng)絡(luò)可以很好地識(shí)別出變量環(huán)境(行星的高低緯、不同的分辨率或不同的太陽(yáng)光照角),更加靈活可靠,這是傳統(tǒng)方法無(wú)法做到的,它也優(yōu)于那些需要事先手動(dòng)設(shè)置檢測(cè)相關(guān)屬性,而后才能訓(xùn)練為可以檢測(cè)隕石坑的傳統(tǒng)機(jī)器學(xué)習(xí)方法。
未來(lái)需要在月球上建造基礎(chǔ)設(shè)施和基站,可與在現(xiàn)場(chǎng)供應(yīng)建筑材料和能源的地區(qū)相連接,通過(guò)檢測(cè)識(shí)別月球表面的隕石坑,預(yù)先探測(cè)并收集其幾何拓?fù)湫畔ⅲ矸e神經(jīng)網(wǎng)絡(luò)提供了一個(gè)很好的機(jī)會(huì),可以直接從帶注釋的圖像中自動(dòng)收集相關(guān)的科學(xué)信息,而不需要手動(dòng)檢測(cè)。 因此基于深度學(xué)習(xí)的檢測(cè)方法是隕石坑檢測(cè)算法研究中的重要方向。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
