一種新型水下搜索模擬系統設計與仿真
2020-10-31 04:20:38趙科莉鄧烈威張德洋歐陽帥捷
艦船科學技術 2020年9期
關鍵詞:模型
趙科莉,李 奔,鄧烈威,張德洋,歐陽帥捷
(1. 中國船舶工業系統工程研究院,北京 100094;2. 中國船舶集團公司第七一四研究所,北京 100101)
0 引 言
水下搜索作戰主要目標是在遂行其他作戰任務情況下,確保高價值目標水下安全[1-2]。潛艇的隱蔽性能好、打擊能力強向來是水面艦艇的巨大威脅,如何提高對潛作戰效能,提高水下搜索群發現概率,縮短發現時間是水下搜索作戰亟待解決的重要課題[3]。水下搜索作戰涉及到包括水面艦艇、直升機和潛艇等多兵種之間多傳感器多武器的協同和對抗,十分復雜[4]。水介質的復雜性也給水下搜索帶來了很大困難,水下搜索設備的性能、可靠性等指標均受到很大影響。因此,以提升水下搜索群發現概率,縮短發現時間為目標,研究水下搜索群兵力配置、傳感器性能指標和工作模式等影響因素對水下搜索群發現概率和發現時間所作的貢獻,解決水下搜索的瓶頸問題顯得尤為重要。
本文設計并實現了一種支持水下搜索群兵力陣位部署、參數配置和能力評估的新型水下搜索模擬系統,該系統的設計目標是通過數字化仿真方法,研究傳感器探測范圍、飛機點水間隔以及陣位間距等因素對水下搜索群發現概率和發現時間的影響。系統完成了功能設計,并通過建立水下搜索群兵力的傳感器模型、運動模型以及能力評估模型,模擬了基于水下搜索平臺之間的信息交互和互聯互通的對水下搜索活動,得到了水下搜索群發現概率和發現時間隨傳感器探測范圍、飛機點水間隔以及陣位間距變化的動態結果。
1 水下搜索模擬系統設計
水下搜索模擬系統主要通過數字化仿真手段,開展水下搜索模擬系統水下搜索兵力的要素模型、運動模型以及能力評估模型設計,實現艦機協同水下搜索
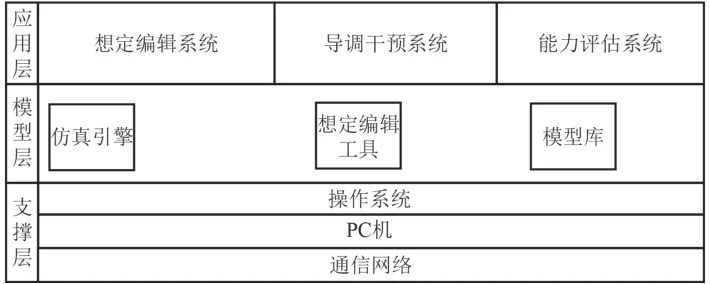
圖1 系統架構Fig. 1 System structure
條件下的水下搜索群發現概率指標分析,研究傳感器探測范圍、飛機點水間隔以及陣位間距對水下搜索發現概率的影響。按照支撐層、模型層、應用層的3層架構進行模擬系統的構建,支撐層是底層運行環境,支撐系統運行的操作系統、通信網絡和硬件設備,模型層為支撐模擬系統運行的引擎、工具和模型庫,應用層為直接面向使用者,包括想定編輯系統、導調干預系統和能力評估系統,系統架構如圖1所示。水下搜索群兵力通常在指定區域建立攔截巡邏線阻止敵潛艇進入,提供水下搜索警戒[2,5]。本文水下搜索模擬系統水下搜索群兵力構成為4艘水面艦艇仿真節點和4架艦載水下搜索直升機仿真節點,對方構成為4艘核潛艇仿真節點。其中,4艘水面艦艇仿真節點均配置1型拖曳聲吶和1型艦殼聲吶,4架艦載水下搜索直升機仿真節點均配置1型吊放聲吶,4艘核潛艇仿真節點均配置1型拖曳聲吶和1型艦首聲吶,系統組成圖如圖2所示。
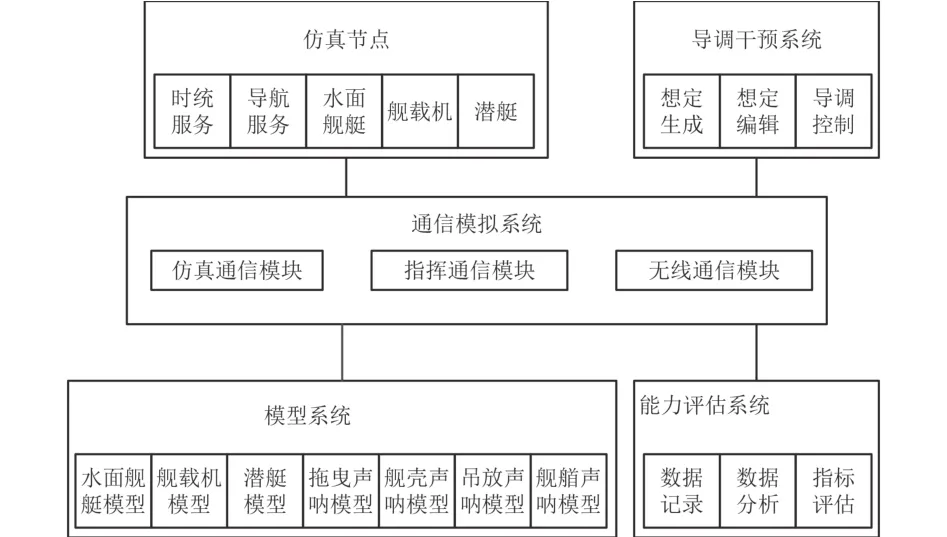
圖2 系統組成Fig. 2 System composition
1.1 系統功能設計
水下搜索模擬系統主要具備想定編輯和推演、導調干預和能力評估等功能。系統支持仿真想定編輯、動態調整和人不在回路的自動推演;支持傳感器參數動態配置;支持飛機點水間隔動態調整;支持水下搜索群兵力陣位動態調整;支持敵潛艇臨機調整下潛深度、航速和航向;支持水下搜索群發現概率和發現時間等能力評估。
1.2 傳感器模型設計
傳感器模型設計主要考慮傳感器的探測范圍、探測方位、發現概率、工作周期等參數。同時,考慮敵方潛艇下潛深度以及敵方潛艇航速對傳感器探測范圍和發現概率的影響。當藍方潛艇發現我方兵力后,潛艇隨機增加潛深或者降低航速,同時我方聲吶探測范圍降低,并且發現概率變小。
1.3 運動模型設計
初始狀態下,4艘水面艦艇和4架水下搜索直升機根據陣形設置分布在指定區域。實際推演時,水面艦艇作往復運動,平均速度v艦艇,往返距離D艦艇往返,水下搜索直升機采用點水探測樣式作往復運動,平均速度v飛機,點水間距D點水,點水周期D點水周期,飛機飛行速度v飛機,往返距離D飛機往返,各平臺機動一致(同時順時針或逆時針)。敵潛艇部署于指定區域的4個方向,以初始速度v敵潛艇,向指定區域中心機動。
1.4 能力評估模型設計
現代潛艇以其優良的靜音性、隱蔽性,對水下區域構成的威脅日益嚴峻[6-8]。在水下搜索作戰中,對潛艇的發現變得越來越難。隨著計算機技術的發展,作戰模擬已經發展成為現代海軍作戰效能分析的最基本方法[9],它的優點在于能夠在考慮對抗的條件下,以具體作戰環境和一定兵力編成背景來評價效能[10]。本文采用多次仿真模擬的方法,重點研究傳感器探測范圍、飛機點水間隔以及搜索兵力陣位間距對水下搜索群發現概率和發現時間的影響。水下搜索群發現概率的定義為:在水下搜索群兵力對水下探測能力覆蓋范圍內,當出現水下目標時,水下搜索群兵力能夠探測并識別出水下目標的概率。水下搜索群發現時間的定義為:在水下搜索群兵力對水下探測能力覆蓋范圍內,從仿真開始到水下搜索群兵力首次探測并識別出水下目標的時間。。敵潛艇個數為
2 水下搜索模擬系統仿真
2.1 典型陣位部署
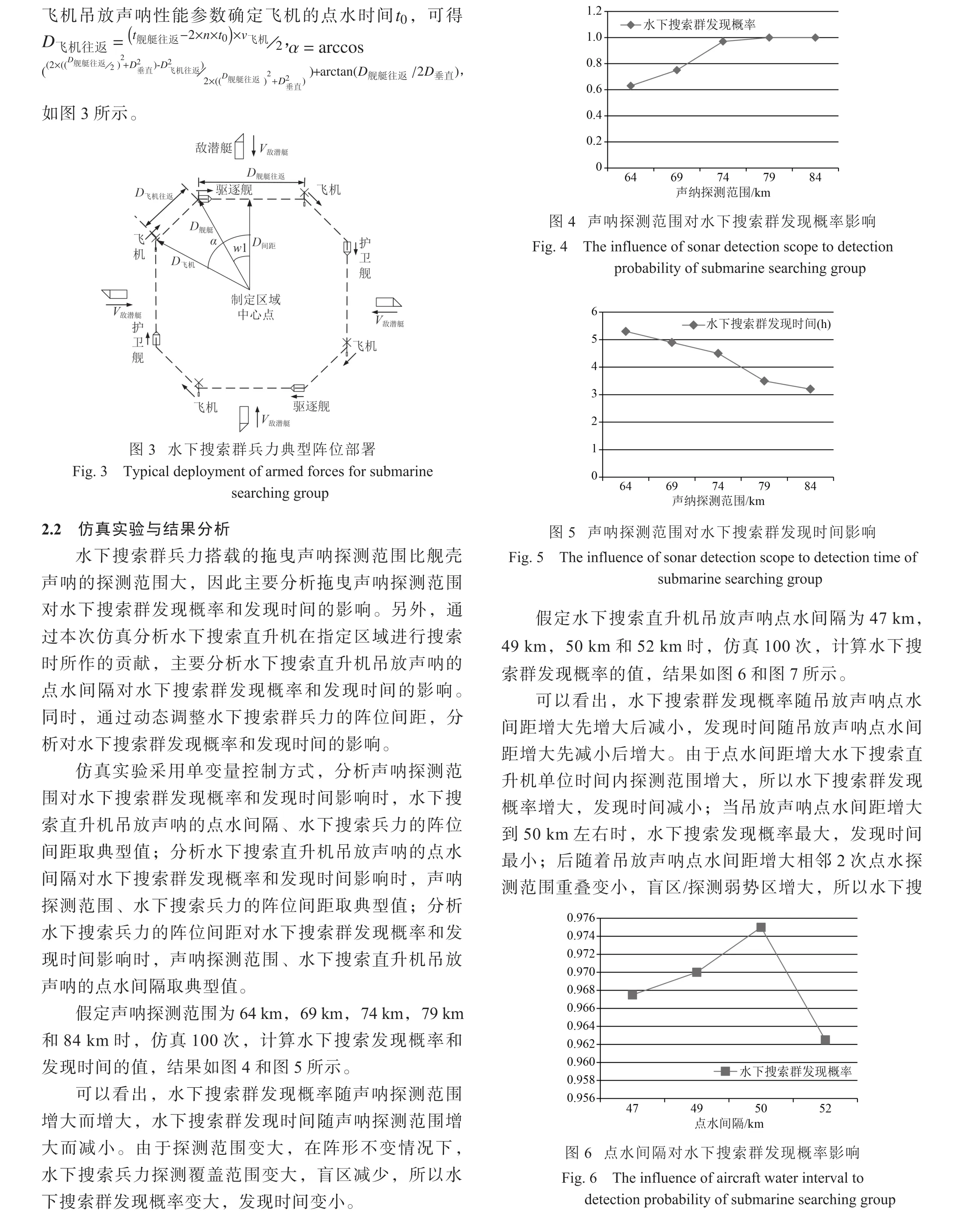
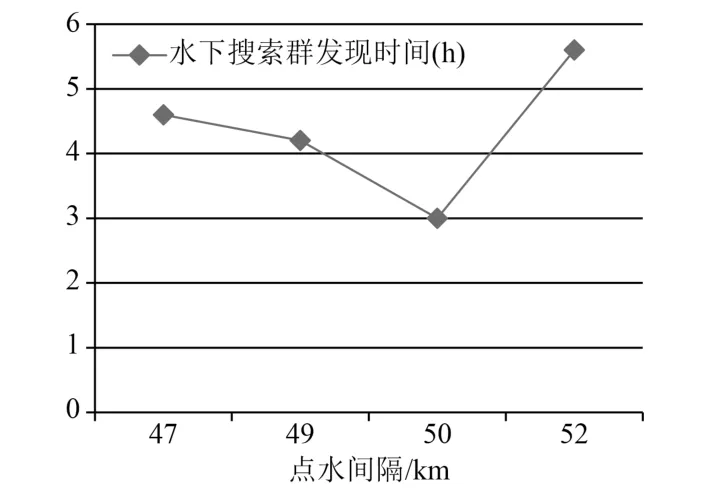
圖7 點水間隔對水下搜索群發現時間影響Fig. 7 the influence of aircraft water interval to detection time of submarine searching group
假定水下搜索兵力的陣位間距為67 km,72 km,77 km,82 km和87 km時,仿真100次,計算水下搜索發現概率的值,結果如圖8和圖9所示。
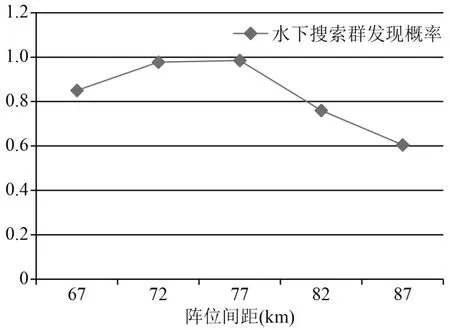
圖8 陣位間距對水下搜索群發現概率影響Fig. 8 the influence of position space to detection probability of submarine searching group
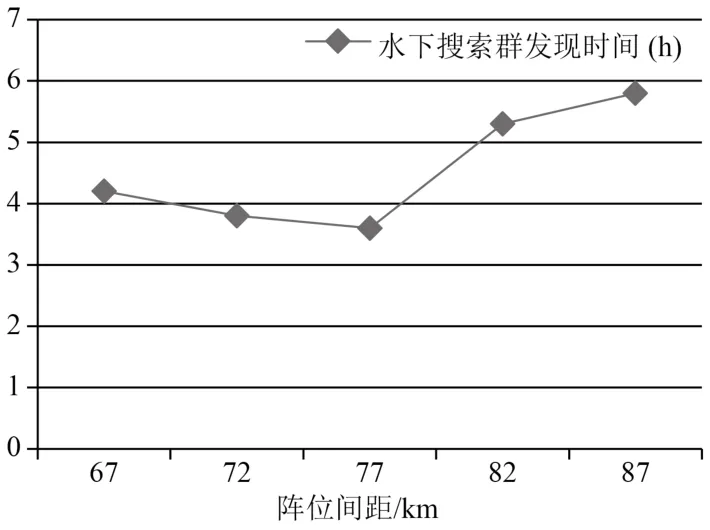
圖9 陣位間距對水下搜索群發現時間影響Fig. 9 the influence of position space to detection time of submarine searching group
可以看出,水下搜索群發現概率隨著陣位間距增大先變大后變小,水下搜索群發現時間隨著陣位間距增大先變小后增大,陣位部署為77 km時,水下搜索群發現概率達到最大值,發現時間最小,由于陣位間距為77 km時,水下搜索兵力剛好能夠相成嚴密的對潛警戒探測圈,所以水下搜索發現概率最大,發現時間最小;陣位部署繼續增大時,水下搜索兵力的有效探測范圍占比變小,探測盲區增大,敵潛艇突破水下搜索兵力的探測圈概率增大,所以水下搜索群發現概率降低,發現時間升高。
3 結 語
本文實現了指定區域水下搜索模擬系統的設計與仿真,綜合考慮敵潛艇下潛深度以及敵潛艇航速對傳感器探測范圍和發現概率的影響,通過建立較為真實的仿真節點、傳感器、運動規則以及能力評估模型,配置合理的水下搜索兵力陣位部署,完成了聲吶探測范圍、吊放聲吶點水間隔以及陣位間距對水下搜索群發現概率和發現時間的影響的定量和定性分析,發現時間隨著發現概率變化逆向變化,驗證了系統的可行性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19