全自動兩臂錨桿鉆車負載敏感系統(tǒng)仿真*
2020-11-02 10:04:48賀安民郭治富
煤礦機電 2020年5期
賀安民,郭治富
(1.國家能源集團 神東煤炭有限公司, 陜西 榆林 719315; 2.中國煤炭科工集團 太原研究院有限公司, 山西 太原 030006)
0 引言
根據(jù)神東礦區(qū)創(chuàng)建世界一流礦井的總體規(guī)劃要求,國家能源集團神東煤炭公司提出了全自動兩臂錨桿鉆車的概念,以實現(xiàn)降低工作強度、提高錨桿支護質(zhì)量與支護效率、減少錨護人員、巷道快速掘進的目標,并為錨桿鉆車向智能化、無人化發(fā)展做技術(shù)鋪墊。全自動錨桿鉆車在煤礦井下巷道工作時,需要實現(xiàn)自主行走、自主確定鉆孔位置、自動錨護、排間距控制等功能。為了實現(xiàn)自由轉(zhuǎn)向及空間定位軌跡平滑連續(xù)精確控制,全自動錨桿鉆車動力系統(tǒng)采用了電液比例負載敏感控制系統(tǒng),液壓原理如圖1所示。
負載敏感系統(tǒng)具有效率高、使用成本低等特點,已在工程機械、礦山機械中得到了廣泛應用。但負載敏感系統(tǒng)的控制特性復雜,早期研究人員常用試驗方法研究其壓力流量特性。

圖1 全自動兩臂錨桿鉆車液壓原理
隨著計算機仿真技術(shù)的發(fā)展,學術(shù)界逐漸開展了負載敏感系統(tǒng)的建模與計算機仿真研究。文獻[1]基于AMESim對全液壓坑道鉆機負載敏感系統(tǒng)進行了仿真建模,驗證了自動上桿裝置的性能。文獻[2]建立了構(gòu)成負載敏感系統(tǒng)的主要元件——負載敏感變量泵、負載敏感多路閥、管道、執(zhí)行機構(gòu)和負載的數(shù)學模型,并通過試驗研究了管道及變量泵可調(diào)參數(shù)對負載敏感系統(tǒng)靜動態(tài)特性的影響。文獻[3]分析推導了負載敏感系統(tǒng)的數(shù)學模型,并用AMESim軟件進行了仿真研究。文獻[4]研究了錨桿鉆車負載敏感系統(tǒng)主要參數(shù)的辨識與計算方法。文獻[5]利用功率鍵合圖實現(xiàn)了對負載敏感系統(tǒng)的仿真試驗。文獻[6]使用SimulationX軟件對液壓挖掘機負載敏感系統(tǒng)及其元件進行了建模和仿真。
本文針對全自動兩臂錨桿鉆車負載敏感系統(tǒng)建模與仿真問題,基于流量連續(xù)性方程和力平衡方程研究了負載敏感系統(tǒng)動力學建模問題,并用仿真軟件驗證了模型的穩(wěn)定性與可靠性。
1 負載敏感系統(tǒng)動力學模型及其穩(wěn)態(tài)方程
1.1 負載敏感系統(tǒng)動力學模型
負載敏感變量泵原理圖如圖1所示。具體參數(shù)如下:Ps為變量泵出口壓力;PLS為負載壓力;PM為變量缸無桿腔壓力;R1為阻尼孔R1的流量系數(shù);R2為阻尼孔R2的流量系數(shù);APs為敏感閥泵出口壓力腔面積;xLS為敏感閥的閥芯位移;xM為變量缸位移;AM1為變量缸無桿腔面積;AM2為變量缸有桿腔面積;KM為變量缸彈簧的剛度;BM為變量缸黏性系數(shù);QS為變量泵輸出流量;V為變量泵最大排量,xMAX為變量缸最大行程。

圖2 負載敏感變量泵原理
負載敏感閥流量連續(xù)性方程:
(1)

(2)
負載敏感閥力平衡方程:
(3)
變量缸力平衡方程:
(4)
假設變量泵出口流量(規(guī)定流出為正)與變量活塞位移之間的關(guān)系可表述為:
(5)
1.2 負載敏感系統(tǒng)各工況穩(wěn)態(tài)方程
1.2.1 低壓卸荷工況穩(wěn)態(tài)方程
由圖1可知,在低壓卸荷工況穩(wěn)態(tài)時需滿足的方程如下。
泵流量連續(xù)性方程:
(6)
式中:xM0為變量缸低壓卸荷時位移;PM0為變量缸低壓卸荷時無桿腔壓力;dR2為變量缸阻尼孔直徑。
負載敏感閥流量連續(xù)性方程:
(7)
式中:xLS0為負載敏感閥芯低壓卸荷時閥芯位移;PS0為負載敏感系統(tǒng)低壓卸荷時系統(tǒng)壓力。
負載敏感閥芯受力平衡方程:
APs·Ps0=KLS·xLS0+2 200 000·ALS
(8)
變量缸活塞受力平衡方程:
(9)
1.2.2 高壓卸荷工況穩(wěn)態(tài)方程
由圖1可知,在高壓卸荷工況穩(wěn)態(tài)時需滿足的方程如下。
泵流量連續(xù)性方程:
(10)
式中:xMH為變量缸高壓卸荷時位移;PMH為變量缸高壓卸荷時無桿腔壓力。
高壓卸荷閥流量連續(xù)性方程:
(11)
式中:xHD為高壓卸荷閥閥芯位移;PSH為負載敏感系統(tǒng)高壓卸荷時系統(tǒng)壓力。
高壓卸荷閥芯力平衡方程:
AHD·PSH=KHD·xHD+28 000 000×AHD
(12)
變量缸受力平衡方程:
(13)
1.2.3 負載敏感工況穩(wěn)態(tài)方程
由圖1可知,在負載敏感工況穩(wěn)態(tài)時需滿足的方程如下。
泵流量連續(xù)性方程:
(14)
式中:ALOAD為負載所需流量對應閥開口面積;PL為負載液壓壓力。
負載敏感閥流量連續(xù)性方程:
(15)
負載敏感閥芯受力平衡方程:
APs·PS=KLS·xLS+2 200 000·ALS
(16)
變量缸活塞受力平衡方程:
(17)
2 負載敏感系統(tǒng)仿真驗證
為驗證全自動兩臂錨桿鉆車負載敏感系統(tǒng)動力學模型的準確性和穩(wěn)定性,用仿真軟件搭建模型進行了仿真驗證。設定流量為180 L/min。給定四通閥輸入信號如圖3所示。0~1.0 s為低壓卸荷狀態(tài),四通閥不工作;1.0~3.3 s為負載敏感工況,四通閥打開;3.3~5.0 s為高壓卸荷工況,四通閥打開,但無流量通過,負載敏感泵高壓卸荷。該輸入信號控制滑閥在0.5 s內(nèi)從中位切換到工作位。
圖4和圖5分別為變量泵出口流量曲線和壓力曲線。由圖4和圖5可知:當四通閥從零位切換到工作位后,變量泵可以穩(wěn)定地從低壓卸荷狀態(tài)切換到負載敏感狀態(tài),流量、壓力曲線超調(diào)很小;當負載油缸到終點時,進入高壓卸荷狀態(tài)。
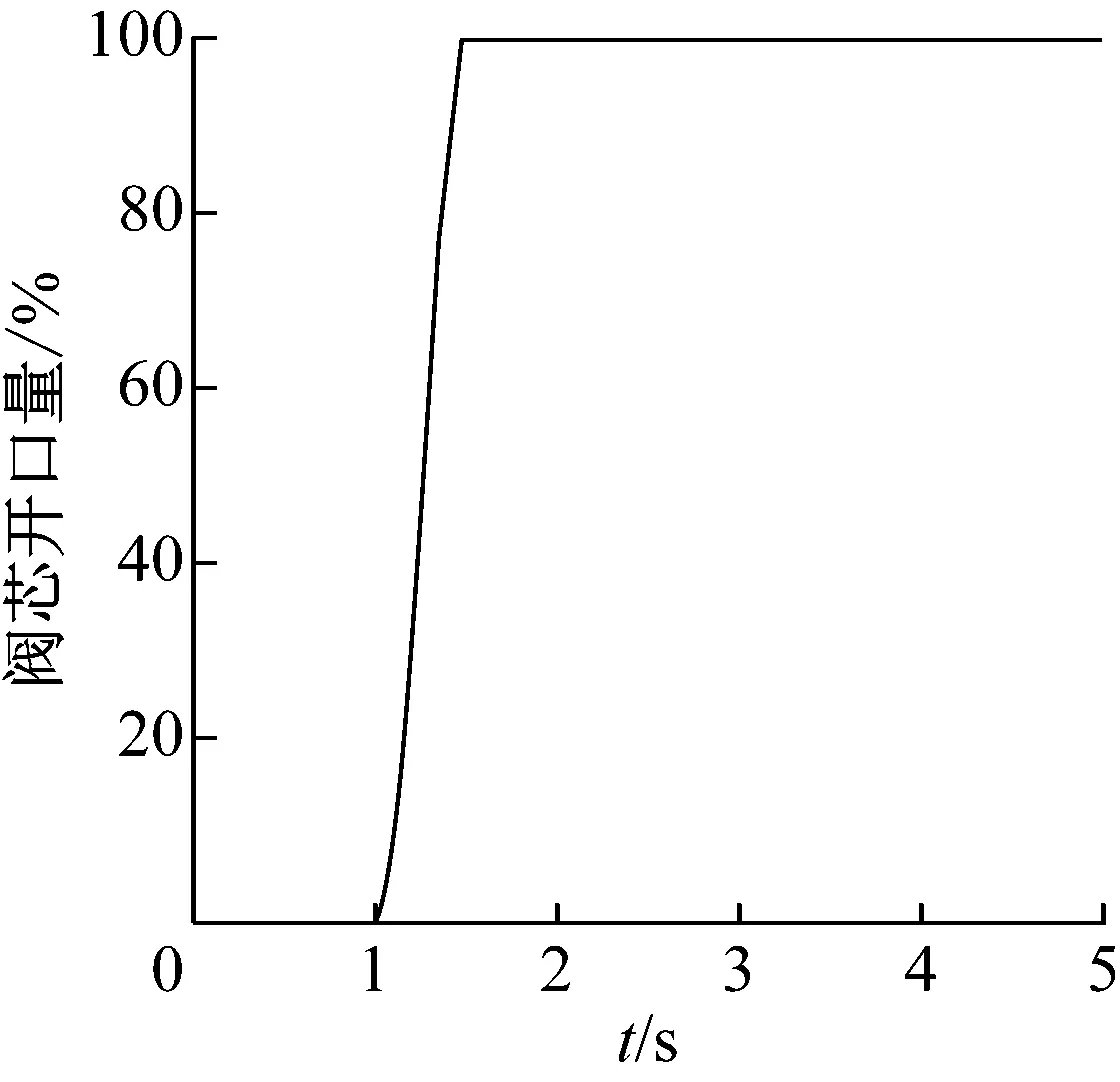
圖3 多路閥模塊輸入信號

圖4 變量泵出口流量
圖6為負載敏感閥芯位移曲線。由圖6可知:當負載敏感系統(tǒng)在低壓卸荷、負載敏感和高壓卸荷工況連續(xù)切換時,負載敏感閥芯在0.30 cm、0.22 cm和0 cm(閥芯全開)之間連續(xù)運動,并能達到穩(wěn)態(tài)平衡位置。
圖7為高壓卸荷閥閥芯位移曲線。由圖7可知:高壓卸荷閥在低壓卸荷和負載敏感工況下不工作;當系統(tǒng)壓力達到高壓卸荷壓力設定值280 bar時,閥芯動作并穩(wěn)定在0.58 cm處。
圖8為變量缸位移曲線。由圖8可知:當負載敏感系統(tǒng)在低壓卸荷、負載敏感和高壓卸荷工況連續(xù)切換時,變量缸在2.1 cm、0.7 cm和2.0 cm之間連續(xù)切換并能達到穩(wěn)態(tài)位置。
3 結(jié)論
本文基于流量連續(xù)性方程和力平衡方程,研究了全自動兩臂錨桿鉆車負載敏感系統(tǒng)的動力學方程建模和低壓卸荷、高壓卸荷、負載敏感3種工況的穩(wěn)態(tài)方程建立,并用仿真軟件對模型進行了仿真驗證。仿真結(jié)果表明,仿真模型可完全模擬負載敏感系統(tǒng)多種工況,并能在各工況下使系統(tǒng)各元件達到穩(wěn)態(tài)。該仿真模型具有較好的穩(wěn)定性和可靠性。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
山東冶金(2022年1期)2022-04-19 13:40:52
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
山東冶金(2019年1期)2019-03-30 01:34:56
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:29
工程建設與設計(2016年4期)2016-02-27 10:51:09
