水陸一體化三維測量時空基準研究
2020-11-02 04:55:34甄冬松
裝備維修技術 2020年38期
甄冬松
關鍵詞:坐標系統一、時間基準
引言
激光和多波束點云水因有不同的參考基準、比例尺和坐標系統,導致數據精度也存在差異;并且內陸水域一般多為不規則的形狀區域,水下地形與岸邊水上地形接邊處難以實現平滑拼接。在實際中水上與水下是互相連接的,然而在應用中水下地形和陸地地形數據是兩部分,并未實現一體化應用。因此,有必要對內陸水下地形數據進行測繪以及整合,實現各種基準空間數據的整合,才能實現對基礎地理信息的融合集成管理。
1 空間統一
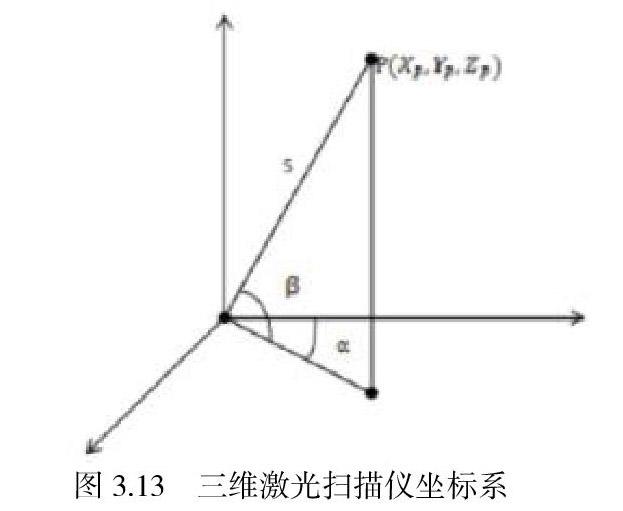
1)三維激光掃描儀坐標系
三維激光掃描儀坐標系是自定義坐標系。該坐標系的原點定義于三維激光掃描儀的發射中心,Z軸與極軸平行,方向垂直向上,與X軸構成激光掃描面(XOZ面),Y軸垂直于XOZ 面。在進行激光束掃描時,待測點P坐標可由P點與掃描儀中心距離S、水平角、垂直角計算得出。
2)多波束測線坐標系
由于多波束測深儀采用具有一定角度的扇形波束發射,多陣列回波信號接收
和多波束數據的轉化及處理等技術。為了建立多波束測量水底地形點位的空間關系,進行多波束測量波束的空間位置轉化,須首先建立多波束測量自身的參考坐標系統。多波束坐標系原點為換能器中心,發射的扇形波束面的每一根波束的角度固定且已知,由聲速及傳播時間,計算每個波束到達水底點位的斜距,進而計算各波束位置及水深。
3)船載坐標系
船載多傳感器綜合測量系統主要將三維激光掃描儀、多波束測深儀、GNSS、定姿定向系統等集成在測量船上,其基本思想是:系統通過傳感器穩定平臺,將水上水下設備進行固聯,用以確定掃描儀、多波束與GPS 的空間位置關系,從而將組合導航GPS /IMU 的實時位置、姿態信息提供給激光掃描儀和多波束。通過船載多傳感器的協同信息采集,將測得的點位坐標歸算到統一的坐標系下。本次測量時,定姿定向系統固定在船艙內部,處于整條測量船的中心位置。三維激光掃描儀固定在船艏。多波束測深儀固定在船右舷。以 Trimble R4 GPS接收機的中心位置建立了船參考坐標系,利用全站儀、鋼尺測算了多波束、三維激光掃描儀、定姿定向系統等各傳感器相對于參考坐標原點的偏移量和水面與參考原點之間的高差,記入到多波束系統安裝、校準綜合手簿、三維激光掃描儀文件參數和船型文件中。
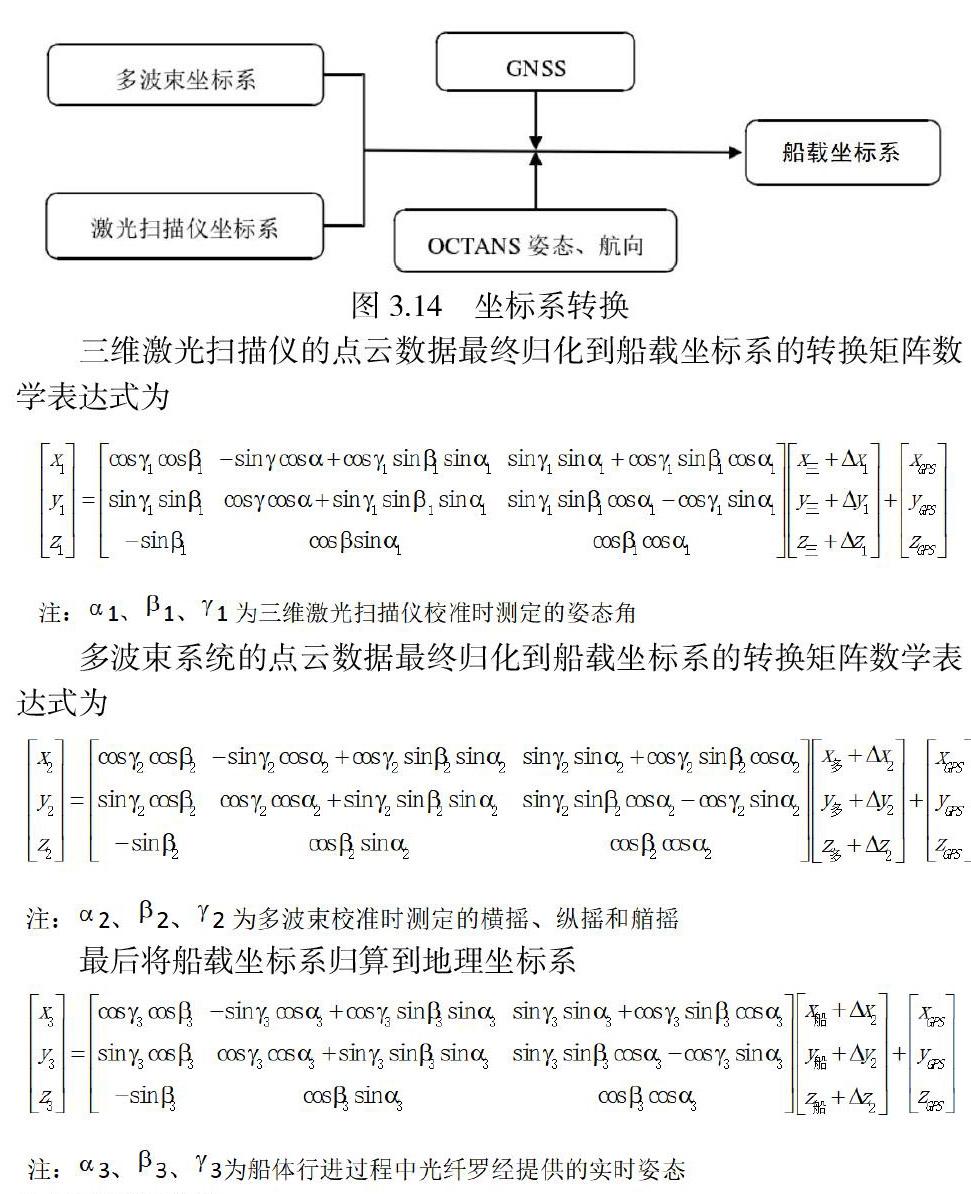
水陸一體化測量系統集成了三維激光掃描儀、多波束測深儀、GNSS、OCTANS 和測船等設備,各傳感器均有其獨立的坐標系,通過其相對位置關系確定,結合 GNSS 實時定位數據、OCTANS 實時姿態及定向數據,轉換為該水陸一體化地理坐標系。
三維激光掃描儀的點云數據最終歸化到船載坐標系的轉換矩陣數學表達式為
多波束系統的點云數據最終歸化到船載坐標系的轉換矩陣數學表達式為
最后將船載坐標系歸算到地理坐標系
2 時間基準統一
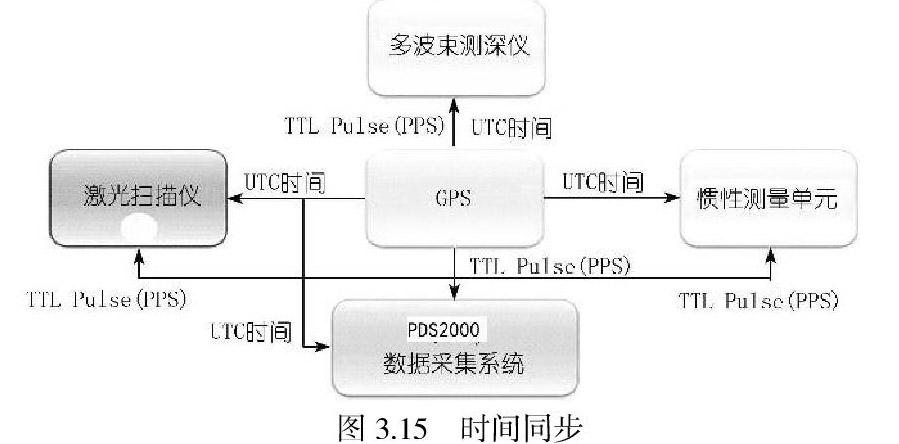
水陸一體化三維測量系統由多傳感器組成,為了將各傳感器數據準確融合,除需各坐標系統的轉換,數據正確時間也必不可少。時間同步一般有兩種方法:一種是時間延遲法;另一種是時間同步法。時間延遲法是基于時間延遲恒定不變的假設,會有一定誤差;時間同步法就是利用GPS的時間與1PPS不停地調整各傳感器的時間,使各傳感器的時間始終與GPS的時間保持同步。本次項目時間系統采用的是利用GPS的1PPS時間分別連接到多波束系統、定姿定向系統和三維掃描系統,實現時間的同步。
時間配準的目的是讓每個激光掃描點都能得到測量該移動站的實時坐標和姿態數據。由于GPS接收機的頻率為10Hz、定姿定向系統的頻率為50Hz和三維激光掃描儀的頻率為10KHz,多波束測深儀的頻率為200KHz且數據獲取時刻并不互相重合,因此需要將頻率低的傳感器所采集的數據以時間為標準向頻率高的傳感器所采集的數據進行內插處理。考慮到時間間隔小,采用加權平均值求取即可。通過GPS接收機的位置信息和定姿定向系統的姿態數據,便可以求取激光掃描儀和多波束測深儀的準確數據。
式中X為內插值,L1為插值區間起始時間的測量值,L2為插值區間結束時間的測量值,K1為插值時間與插值區間起始時間之差,K2為插值時間與插值區間結束時間之差。
3實驗結果
項目組對本系統進行了應用示范,對水陸一體化采集系統進行了針對性測試。其中,系統水上部分采用LANDMark Marine三維激光掃描儀,最大測量距離為1700m,測量精度8mm,垂直掃描角度為30°~130°;系統水下部分采用多波束Seabat 7125SV2,最大量程500m,量程分辨率為1. 25cm,覆蓋寬度10°~160°,分為256 個波束。圖3.20給出了系統對團泊東區別墅區附近的實驗效果圖,利用水陸三維一體化測量系統,提高了作業效率,降低了作業風險,減輕了作業勞動強度,且成果豐富,應用廣泛。
4.總結
通過水陸一體化三維測量技術研究,研制了船載水陸三維一體化綜合測量系統,提出了水陸地形無縫掃測方案及無需潮位觀測的多波束水深測量技術,給出了船載多源傳感器配置方案、校準方法、坐標基準統一方法、測深和地形點云處理方法、多源點云數據融合方法以及精度評估方法,形成了水上水下一體化測量的方法體系,取得了滿足規范要求的點云精度,克服了傳統測繪方法的技術瓶頸,實現了河道帶狀地形圖的一體化移動測量,為河道及灘涂三維地理信息要素的高精度、低成本、高效獲取提供了一種新途徑。
參考文獻
[1]楊盼.水陸三維一體化測量系統的集成與實現[D].成都理工大學,2018.
[2]李英成,文沃根,王偉.快速獲取地面三維數據的LIDAR技術系統[J].測繪科學,2018,(04):35-38.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
