中大型直升機無人化改裝技術及飛行驗證
2020-11-08 02:18:44袁豪放童燕吳智名徐飛
無人機 2020年6期
袁豪放,童燕,吳智名,徐飛
西安聯飛智能裝備研究院有限責任公司
本文基于某型直升機無人化改裝的項目實踐,梳理總結直升機無人化改裝的技術難點,討論在直升機總體改裝過程中涉及的重要改裝設計工作,并對比無人化改裝的直升機地速保持飛行控制仿真結果和實際飛行測試結果,驗證改裝方案的合理性與正確性,對中大型直升機無人化改裝具有一定的參考價值和借鑒意義。
近年來,無人直升機因其具有垂直起降、懸停、任務載荷重量大、機動性強等諸多顯著優點,在國際范圍內越來越受到廣泛關注。
對于最大起飛重量大于500kg的中大型無人直升機研發的技術途徑,國外過去20年的經驗表明,采用成熟的直升機現貨進行無人化改裝是快速和有效的手段,可以有效解決無人直升機平臺設計的問題,還可以縮短研制周期、降低研制風險。
直升機無人化改裝難點
雖然采用成熟的直升機現貨進行無人化改裝是無人直升機研發的一條捷徑,但在實際改裝過程中仍存在許多技術難點。
原型機機載功能實現方式分析
由于原型機的控制是由駕駛員直接操作實現,因此首先需要解決無人直升機如何通過電控方式實現相同功能的問題。改裝時需要根據原型機的相關資料以及直升機實物,對有人駕駛模式的機載系統功能、接口定義進行全面分析。
高可靠性機載系統研制
相比于小型直升機,中大型直升機具有更高的價值,并通常掛載昂貴的任務載荷設備,所以在進行無人化改裝時,要求機載系統具有極高的可靠性。
無人直升機機載系統設計過程中,為防止某些關鍵系統故障導致核心功能的喪失,需要對這些關鍵系統進行冗余設計,以提高系統的可靠性,并通過非相似設計避免共模故障引起災難性事故。
系統辨識和建模技術
直升機飛行動力學建模是無人直升機飛控系統研制的基礎。由于直升機是一個多變量、強耦合、非線性的控制對象,精確的理論運動模型參數難以確定,通常采用系統辨識的方法獲得直升機飛行動力學模型參數。
目前系統辨識技術可分為頻域和時域兩種,工程中一般采用頻域的方法獲得動力學模型參數,然后采用時域仿真對辨識模型進行驗證。
頻域辨識時首先根據原型機氣動參數確定一個初始的直升機動力學模型,然后控制直升機進行一系列規定動作對直升機進行激勵,最后將激勵所產生的響應數據和初始動力學模型輸入到直升機系統辨識算法,獲得直升機動力學模型參數。
直升機振動的測量和規避
直升機發動機和旋翼旋轉產生的振動頻率低、振幅大,高振動水平將降低設備的工作性能,甚至導致設備非正常工作,例如低頻振動與飛控系統的控制頻帶接近,容易造成飛控系統發散,而大振幅振動容易使導航系統失效,導致無人直升機失去姿態、位置信號,造成災難性事故。
因此,必須采取有效的振動控制措施把設備振動水平控制在合適的范圍,一般改裝時需要對直升機關鍵系統進行機械減震和軟件濾波,最大程度地減弱振動對系統的影響。
無人直升機總體改裝
無人化改裝的原型機是一架最大起飛重量為700kg、3槳葉、2座的直升機,旋翼直徑7.2m,由一臺最大功率106.7kW的“萊康明”O-360(Lycoming O-360)活塞發動機提供動力。
在原型機上,駕駛員根據對周圍環境和飛行姿態的觀察和判斷,通過操縱桿和各種開關實現各機載系統和直升機運動的協同控制,但無人化改裝的過程中,這些動作將全部由各種傳感器、計算機和作動器所替代。
根據無人直升機的功能需求,對原型機的供電系統、發動機控制系統、機械結構、原型機重心、大氣系統、導航系統、飛控系統、數據鏈路、任務載荷等結構和設備進行重新設計或改裝。
機載設備設計和加裝
為使無人直升機具備遙控控制、自動控制、導航定位和空地通信功能,拆除了原型機駕駛艙內的座椅、儀表盤、安全帶和操縱桿系,從而減輕無人直升機空機重量,提高載重能力,并加裝飛控系統、導航系統和數據鏈等機載設備。各機載設備安裝位置如圖1所示。
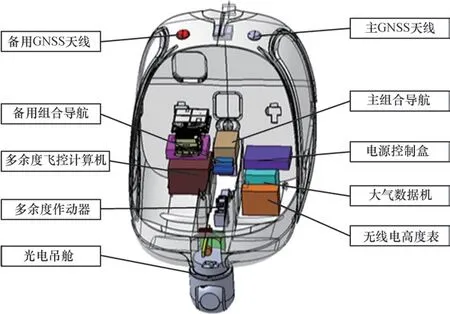
圖1 機載設備安裝示意圖。
為提高無人直升機的安全性,關鍵機載設備如組合導航、飛控計算機、作動器等均采用非相似多余度設計,保證這些系統不會存在單點故障風險,同時無人直升機不會因為共模故障而喪失飛行控制功能。
供電系統設計和改裝
如果說發動機是無人機的心臟,那么電源系統就是無人機的血液,電源系統的可靠性對無人機至關重要。
在原型機的改裝過程中,機載設備的總電功率增加較多,因此原配的發電機輸出功率已不能滿足要求。同時考慮到無人直升機的強振動環境和安全性要求,設計了冗余的供電系統架構,保證在發動機或發電機故障時,飛控和導航系統仍然能夠控制作動器使無人直升機通過旋翼自轉下滑軟著陸,從而最大限度降低損失。改裝后的供電系統如圖2所示。
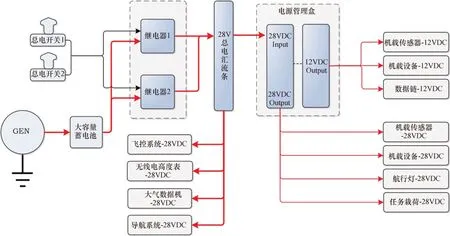
圖2 供電系統改裝結構示意。
重心位置分配
重心對直升機的穩定和安全飛行至關重要。由于改裝需要拆除原型機自帶的座椅、儀表、駕駛桿系等設備,安裝很多機載設備,而且無駕駛員和乘客也會影響直升機原有的重心,因此在直升機無人化改裝時直升機重心改變很大。
通過量化計算的方式對各個拆除和加裝的部件進行分析,并通過實際測量確定改裝后的重心位置,保證重心位置在總體設計要求的范圍內。
改裝前后平臺重心計算結果如圖3所示,其中藍色框為最大重心理論值范圍,紫色線為原型機在搭載駕駛員和乘客的情況下,隨著燃油余量變化時的重心范圍,紅色線為改裝后無人直升機隨著燃油余量變化時的重心范圍。由此看出,直升機改裝后的重心較改裝前向前移動了60~70mm,但仍然在最大重心理論值范圍內,可以滿足總體要求。
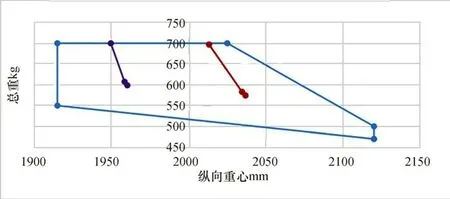
圖3 改裝前后平臺重心范圍對比。
飛行控制算法仿真與驗證
使用頻域辨識的方法獲得原型機的動力學模型,然后在控制算法架構設計和參數仿真調試的基礎上,在鐵鳥臺架上對機載設備軟硬件進行綜合測試,最后在實際飛行測試前期通過安裝防滾架和系留繩,并逐步放松軟件指令限制等方式,對飛行控制算法進行飛行驗證。
以地速保持為例,外部環境為無風狀態,無人直升機初始在懸停狀態,隨后切換到6m/s地速保持模態。在實際飛行測試過程中,無人直升機按地面站發出的地速指令進入地速保持模式,通過遙測數據記錄實時地速數據。仿真結果和實際飛行測試效果對比見圖4。
從圖4對比結果看出,仿真數據和實測數據基本吻合,地速保持較平穩,但從控制效果來看,無人直升機的響應速度偏慢,原因是為了保證該機的安全,無人直升機控制律在調試階段對控制頻帶限制得比較嚴格。當無人直升機測試結果足夠穩定后,可以進一步放松控制頻帶和指令的限制,提高無人直升機的響應速度和性能。

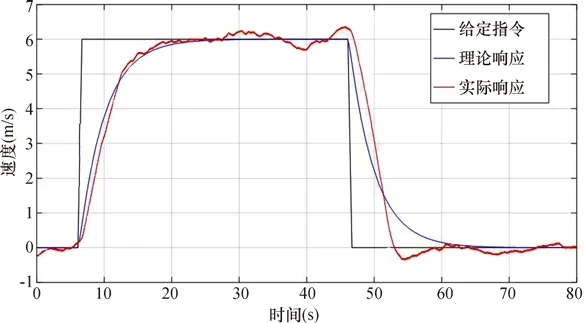
圖4 地速保持功能仿真與飛行測試結果。
通過對直升機的機載設備、供電系統、重心分配和控制算法等進行改裝設計,完成了無人化改裝工作,并通過桌面仿真、鐵鳥試驗和飛行試驗,驗證了改裝方案的合理性和正確性,對中大型直升機無人化改裝具有一定參考價值和借鑒意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45