基于大數據云服務的交叉路口車輛信息共享系統
2020-11-09 03:41:40魏春鵬張魯楠
汽車零部件 2020年10期
魏春鵬,張魯楠
(北京汽車研究總院有限公司,北京 101300)
0 引言
隨著城市化的快速推進,城市路網復雜化,道路路口視野死角將變得更多,路口交通事故數量亦隨之不斷增多[1]。城市交叉路口和車輛的龐大數量基數,使得整個交通系統的數據量非常龐大,這就是交通數據3V(大容量、多樣性、高速度)特性之一:交通數據大容量的表現。僅以杭州市內道路卡口數據為例,每天達到約15 GB的數據量[2](該統計包含了微波采集技術、視頻采集技術、環形線圈感應式采集技術等數據量)。車輛的位置及速度實時變化,這些數據具有連續不間斷、規模巨大的特點,因此要求處理系統具有實時、連續處理大數據的響應能力。數據實時采集是智能分析預測的基礎。大數據實時處理技術的發展,促進了大數據信息實時處理及行為結果預測技術的發展。
在交通數據分析方面,展示以下一個基于交通大數據分析,進行數據分析處理的具體案例。該數據分析平臺是基于商用計算機構建小機集群,并使用Hbase進行大數據存儲,通過MapReduce系統完成數據的分布式計算,并實現對交通數據的分析,以及未來趨勢的預測[3]。在交通大數據處理平臺中引入大數據實時處理系統,成為一種具有實時數據流處理的平臺。此平臺業務涉及各類交通應用場景并采集了相關數據,但沒有涉及在獲取如此巨大的實時數據后對車輛反饋指引方面工作。
文中在智能交通大數據處理平臺上利用大數據實時處理系統,獲取路口周邊實時車輛位置和速度數據,并綜合處理計算得出該路口是否會發生威脅某些車輛的危險事件,并給出相應處理意見。效果圖如圖1所示。本文作者主要從系統構建上給出一種可行性方案,不針對具體業務系統進行論證。

圖1 交叉路口車輛信息共享示意
1 交叉路口車輛信息共享系統的功能需求與邏輯框架
1.1 車輛數據批量時效性分析技術
如上所述,交叉路口車輛信息共享系統需要的不僅僅是大數據采集存儲,也不僅僅是處理速度實時性要求高的單一需求,該系統需要具有實時處理大數據能力,只有這樣,才能更早地將預測的結果通知給駕駛者,從而引導駕駛人作出正確的行為。
云計算應用領域按照數據處理的時間性需求,可分批處理分析、近實時分析、實時分析。目前實時分析平臺主要分為通用性分析平臺(S4,Storm)及復雜事件處理平臺兩大類。復雜事件處理(Complex Event Progressing,CEP)是一種新興的基于事件流的技術,它將系統數據看作不同類型的事件,通過分析事件間的關系,建立不同的事件關系序列庫,利用過濾、關聯、聚合等技術,最終由簡單事件產生高級事件或商業流程[4],CEP平臺主要有Hstreaming、StreamBase Complex Event Processing(CEP)/StreamBase LiveView、StreamBase SQLStream、OpenCQ等。
表1列出了S4、Storm、Hstreaming的平臺特點。
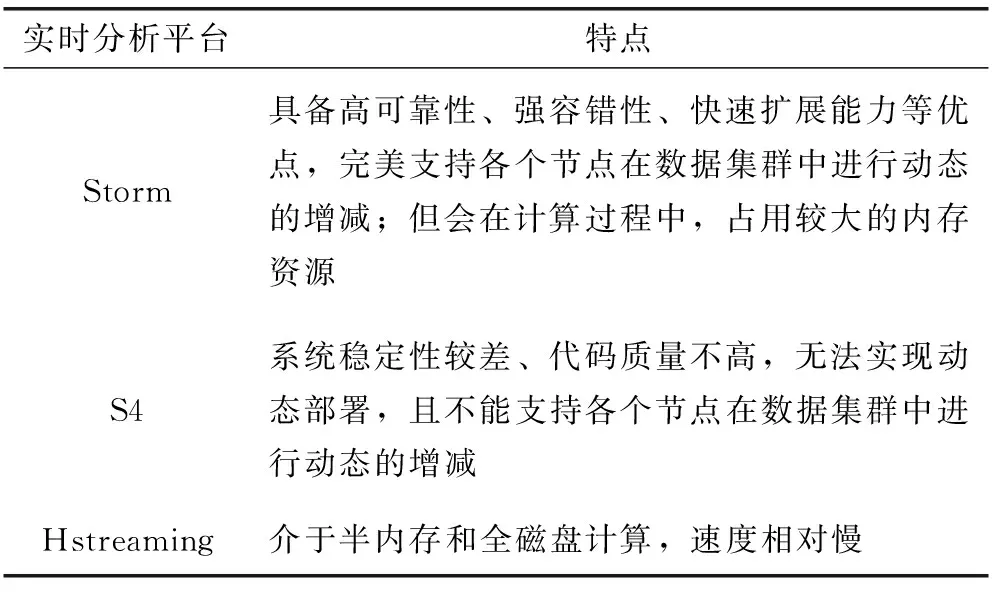
表1 實時分析平臺特點
1.2 終端數據采集
由于車輛在路上行駛,其位置實時變化,實時處理系統只有盡可能地準確獲知其坐標位置,才能使得整套系統的危險預測更有利用價值。
(1)A-GPS定位技術
A-GPS通信技術,是一種結合網絡基站信息和GPS信息對終端進行定位的技術,既利用全球衛星定位系統GPS,同時也利用了移動運營商的基站網絡,是一種移動網絡與GPS系統融合的定位技術。相較于傳統的GPS系統,A-GPS技術具備了開機后快速完成首次定位、定位精度更高的特點。
(2)慣性制導定位技術
慣導系統是以加速度傳感器及陀螺儀為主要器件的導航數據計算系統,慣導系統由陀螺儀輸出的參數建立坐標系,并按照加速度傳感器輸出的數據計算車輛在坐標系中的具體位置以及速度等參數。慣導推算模塊通過上述參數以及車速等信號進行實時計算,得出車輛具體的經緯度位置參數。
(3)視覺定位導航技術
視覺導航依據視覺圖像,結合視頻處理、標志物識別及動態算法處理等技術,通過視頻捕捉車輛的運動狀態及位置坐標,運用智能視覺計算,實現車輛的導航。
1.3 交叉路口車輛信息分析處理系統
智能交通系統(Intelligent Traffic System,ITS)是一套復雜而龐大的系統網絡,通過將先進的信息技術、數據通信傳輸技術、電子控制技術以及計算機處理技術等有效地運用于整個運輸管理體系,使人、車、路密切地配合,和諧地統一,從而建立起一種在大范圍內,全方位發揮作用的實時、準確、高效的運輸綜合管理系統[5],提高了交通運輸效率,緩解交通阻塞,提高路網通過能力。
文中僅涉及智能交通大數據處理平臺中的實時處理子系統,整體系統邏輯框圖如圖2所示。
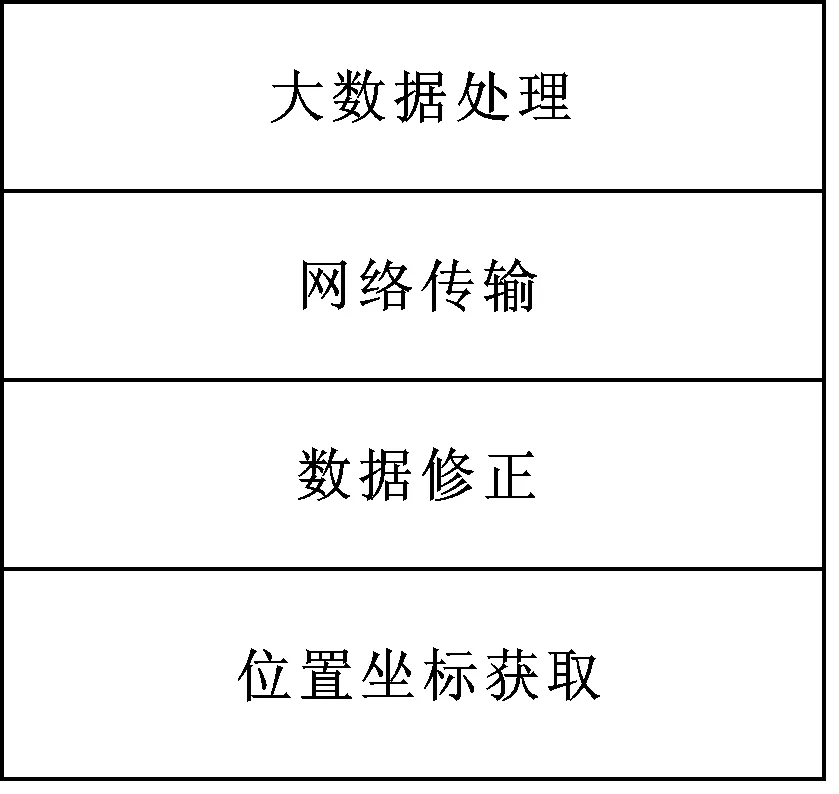
圖2 整體系統邏輯
該框圖主要分三部分:位置坐標獲取、傳輸層、應用層。由于各種誤差的存在,在車輛上采取了多種途徑進行位置誤差的修正,以追求位置的盡可能精確;傳輸層主要是車與云端的數據傳輸;應用層是基于云端地圖的大數據處理,結合車輛位置坐標,確認車輛即將進入的交叉口,并匯總該交叉口的其他路口車輛信息(位置、速度、方向燈狀態等),并通過算法策略預測出對駛入路口的每個車輛的危險事件。最終將有危險的結果反饋給駕駛人員。由于采用實時處理系統,所以該結果會不斷更新。
2 交叉路口車輛信息共享系統構建
根據前面所述,該系統必須具有低延遲、高實時性、高容錯性的特性,支持異構環境(基于成本和分步實現系統考慮),其核心技術包括大數據實時處理技術和終端數據精確定位技術。
整體系統示意圖如圖3所示。其中,基站提供了傳輸網絡和LBS服務,衛星GPS提供了位置服務,云端提供了數據處理預測服務。未在示意圖中體現出該方案為了使定位更加精確而采用的兩項技術:慣性制導和視覺制導。
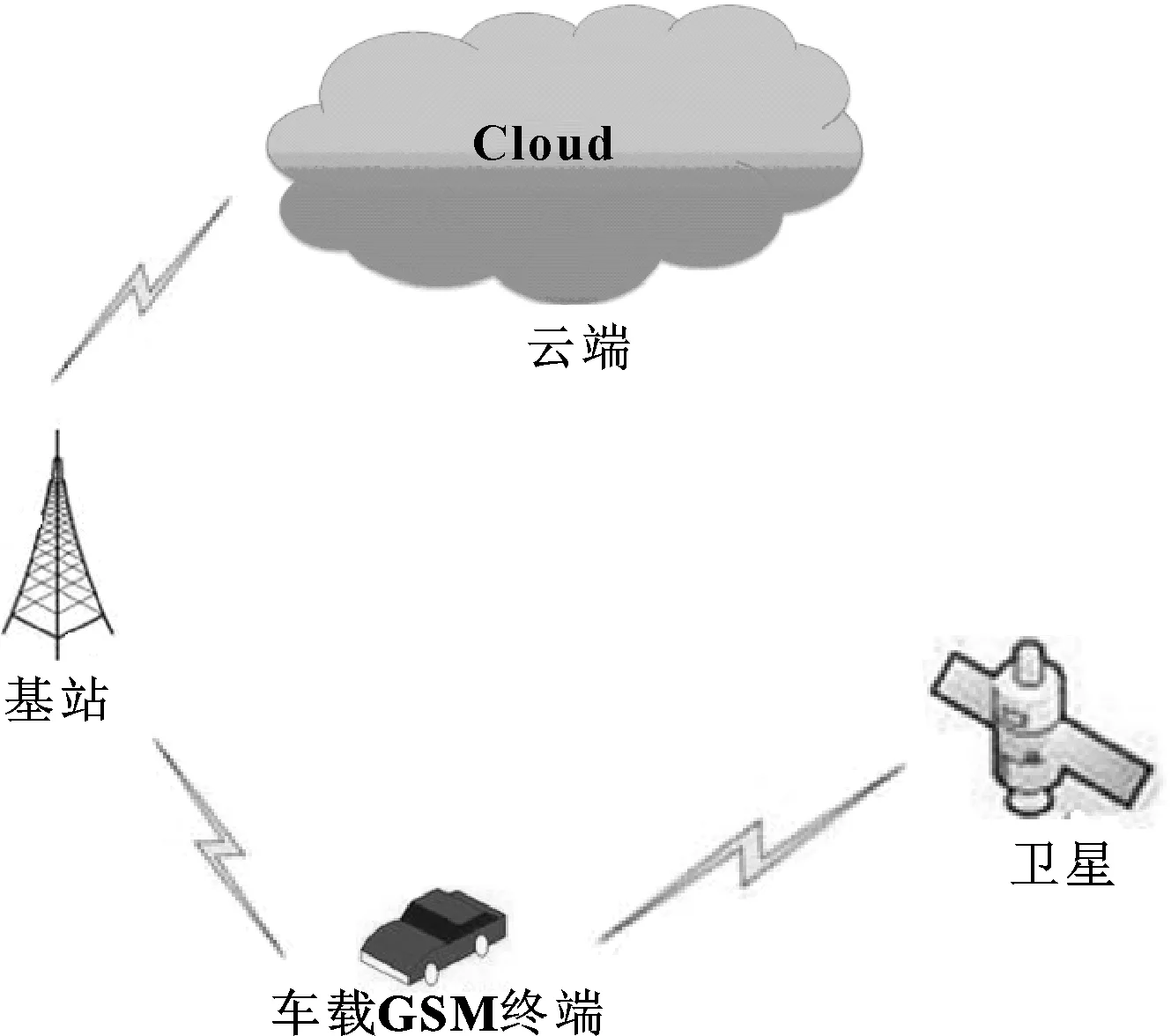
圖3 整體系統示意
有效地精確定位加上實時的大數據處理系統,構成了方案的架構。
圖4、圖5為整個系統中上行和下行邏輯圖。上行邏輯圖里的位置數據修正,主要是依據LBS、慣性制導和視覺導航進行處理。具體見第2.2節。

圖4 上行邏輯
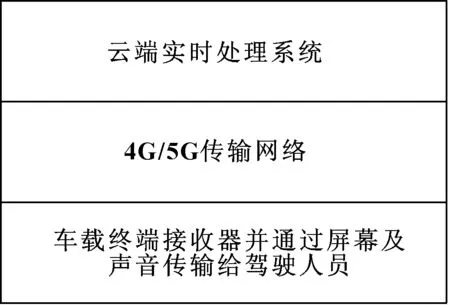
圖5 下行邏輯
2.1 實時數據處理系統
鑒于Storm的特性:可被用于“連續計算”(Continuous Computation),對數據流做連續查詢,在計算時就將結果以流的形式輸出給用戶[4]。該系統采用Storm框架作為實時處理系統。
Storm框架的數據流是通過運行一個Topology的拓撲實現數據流轉,類似于Hadoop上運行的是MapReduce jobs。但Storm會持續不斷地處理達到的數據,而不會自動結束該Topology。
Storm框架提供的基礎組件有:Spout和Bolt。其中的Spout組件是信息源,即從外部數據源讀取數據,并發送給Topology;邏輯處理組件Bolts,是用于將所有的消息處理邏輯被封裝在Bolts里面,可以發送多條消息。Bolts可以一級一級處理傳遞,因此一個Topology的數據流如圖6所示。
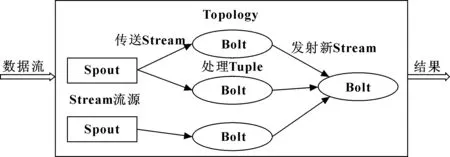
圖6 Topology結構
Storm集群中共包含了兩個主要節點,即控制節點(Master Node)和工作節點(Worker Node)。每一個工作節點上面運行一個叫作Supervisor的節點。整個工作機制如圖7所示。
2.2 終端數據采集系統
該系統終端數據采集分兩部分:一部分是位置數據、速度和車輛轉向燈的狀態等數據的采集;另一部分是從云端獲取即將駛入的交叉路口周邊車況的影響情況,并獲得云端給出的危險提示。文中僅先討論位置坐標精確定位,而對于實時數據處理的算法策略和終端獲取云端數據信息放在下一步展開討論。
由于傳統的GPS定位系統受環境影響明顯,尤其陰天、霧霾天氣。首次定位時間長,甚至無法定位,對于該系統如果出現無法定位,則整個系統將因此而無法有效工作。為此采用A-GPS,利用移動基站的LBS服務,提高首次定位及由于天氣帶來的糟糕的定位效果。
傳統GPS定位在車輛駛入高架橋或隧道時會出現定位無效。為此該方案在數據采集終端中采用慣性導航方案,集成陀螺儀和加速度傳感器,以實現無GPS信號時的連續定位或駛入立交橋時無效定位變得可以保持精確定位。同時接受GPS定位坐標修正。
當車輛駛入多車道時,為了能精確判斷車輛在一個路口的精確位置(如哪個車道,是否駛入轉向車道)而不僅僅是距離路口的距離,同時由于慣性制導存在累計誤差特性。數據采集終端采用視覺導航,主要利用攝像頭拍攝路面信息,通過與車載地圖比較,及車道上交通標線的識別,從而修正慣性制導誤差,提高車輛坐標位置確認。
3 結束語
文中主要介紹了交叉路口車輛信息共享系統的基礎理論及核心方案。首先,介紹了整個系統的開發背景、功能需求以及邏輯框架,并據此展開介紹了具體方案,同時著重介紹了其中的核心技術。其次,具體介紹了該系統針對交通信息的大數據分析,以及在交通大數據實時計算方面的可行方案。最后,介紹了系統原型的構成,并據此論證了方案的可行性。
通過上述成果,將進一步展開具體開發及驗證工作,并著重對實時交通大數據的數據流處理及分析算法等方面展開重點研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
