基于無跡卡爾曼濾波和協(xié)方差交叉融合的分層多簇?zé)o線傳感器網(wǎng)絡(luò)多速率跟蹤算法
2020-11-09 01:54:28許紅香白星振董禮廷張金昌
科學(xué)技術(shù)與工程 2020年27期
關(guān)鍵詞:融合
許紅香, 白星振, 董禮廷, 張金昌
(山東科技大學(xué)電氣與自動(dòng)化工程學(xué)院, 青島 266590)
目標(biāo)跟蹤是無線傳感器網(wǎng)絡(luò)(wireless sensor networks,WSNs)最具代表性和基礎(chǔ)性的應(yīng)用之一[1-4]。大量的微型傳感器節(jié)點(diǎn)部署在監(jiān)測(cè)區(qū)域內(nèi),通過無線通信方式形成一個(gè)多跳的自組織的網(wǎng)絡(luò)系統(tǒng),這個(gè)系統(tǒng)被稱為WSNs[1,3]。隨著人工智能領(lǐng)域的飛速發(fā)展,目標(biāo)跟蹤問題得到了越來越多的關(guān)注,幾乎涉及WSNs的各個(gè)應(yīng)用領(lǐng)域,如環(huán)境監(jiān)測(cè)、軍事監(jiān)控和基建保護(hù)等,體現(xiàn)了巨大的科學(xué)意義和應(yīng)用前景[3]。WSNs具有靈活部署、消耗低、容量小、應(yīng)用范圍廣等優(yōu)點(diǎn),但是也受到電池容量、計(jì)算能力和通訊帶寬的影響[4]。傳統(tǒng)的WSNs是通過每個(gè)傳感器節(jié)點(diǎn)在網(wǎng)絡(luò)上共享信息,一起完成復(fù)雜的工作[1]。然而,在實(shí)際應(yīng)用中,隨著傳感器覆蓋范圍的不斷擴(kuò)大,每個(gè)傳感器都與融合中心進(jìn)行通訊是不現(xiàn)實(shí)的。多個(gè)傳感器在短時(shí)間內(nèi)與光纖進(jìn)行通信,會(huì)造成資源浪費(fèi)、信道阻塞等問題[5]。針對(duì)這一問題,將網(wǎng)絡(luò)中的所有傳感器劃分為多個(gè)簇,同一簇內(nèi)的傳感器連接到同一簇頭(cluster head,CH)節(jié)點(diǎn),作為局部估計(jì)量,并預(yù)先由CH節(jié)點(diǎn)對(duì)每個(gè)簇的采樣信息進(jìn)行預(yù)處理,不同簇的CH節(jié)點(diǎn)與融合中心相連接,然后將局部估計(jì)值上傳到融合中心[6-7]。
文獻(xiàn)[8]提出多傳感器數(shù)據(jù)融合中各個(gè)傳感器以相同的采樣和傳輸速率進(jìn)行數(shù)據(jù)的采集和傳輸。但是,在實(shí)際應(yīng)用中,隨著傳感器系統(tǒng)規(guī)模的擴(kuò)大,傳感器固有延時(shí)和通信延時(shí),不同的傳感器的采樣和傳輸速率往往不同[9]。因此,傳感器可以采用不同的采樣和傳輸速率進(jìn)行數(shù)據(jù)的采集、傳輸,將數(shù)據(jù)發(fā)送到局部估計(jì)器,進(jìn)而發(fā)送到融合中心。文獻(xiàn)[10]研究了卡爾曼濾波(Kalman filter,KF)模型的多傳感器數(shù)據(jù)融合定位技術(shù),文獻(xiàn)[11]提出一種基于改進(jìn)KF的姿態(tài)解算法,文獻(xiàn)[12]將卡爾曼一致性濾波應(yīng)用于目標(biāo)跟蹤中。然而,KF只能處理線性系統(tǒng),針對(duì)非線性系統(tǒng)的性能很差。針對(duì)這個(gè)問題,文獻(xiàn)[13]提出擴(kuò)展卡爾曼濾波(extended Kalman filter,EKF),EKF是基于一階非線性系統(tǒng)的一階泰勒級(jí)數(shù)展開,一般對(duì)線性或者弱非線性系統(tǒng)有較好的結(jié)果。針對(duì)強(qiáng)非線性系統(tǒng)效果降低。因此,Julier等提出了無跡卡爾曼濾波(unscented Kalman filter,UKF),UKF是對(duì)非線性函數(shù)的概率密度進(jìn)行近似,不需要計(jì)算雅克比矩陣,一般可達(dá)二階,甚至三階精度,有效的克服了KF、EKF在非線性系統(tǒng)中估計(jì)精度低、穩(wěn)定性差等缺點(diǎn)[14-15]。
基于以上分析,提出基于UKF和協(xié)方差交叉(covariance intersection,CI)融合的分層多簇WSNs多速率跟蹤算法。傳感器節(jié)點(diǎn)采用不同的采樣和傳輸速率進(jìn)行數(shù)據(jù)的采集和傳輸,同一簇中的傳感器可以互相通信,將收集到的測(cè)量值生成局部估計(jì),局部估計(jì)采用UKF。融合中心利用CI融合算法將局部估計(jì)值生成融合估計(jì)。CI融合算法可以避免互協(xié)方差矩陣的計(jì)算,降低計(jì)算的復(fù)雜度。
1 系統(tǒng)模型
考慮二維空間目標(biāo)跟蹤的勻速運(yùn)動(dòng)模型[16],狀態(tài)方程為
x(tk+1)=Fx(tk)+Gω(tk)
(1)
(2)
式中:x(tk)=[xp(tk),xv(tk),yp(tk),yv(tk)];xp(tk)和yp(tk)分別為目標(biāo)在x軸和y軸的位置;xv(tk)和yv(tk)分別為目標(biāo)在x軸和y軸的速度;F、G為適當(dāng)維數(shù)的時(shí)變矩陣;Δtk=tk+1-tk為時(shí)間間隔,可以根據(jù)WSNs的功率狀態(tài)和目標(biāo)的性能需求在線確定;ω(tk)=[ωx(tk),ωy(tk)]T為均值為0的高斯白噪聲。滿足如下條件:
E[ω(tk)]=0
(3)
E[ω(tk)ωT(tl)]=Q(tk)δkl
(4)
式中:E期望;Q(tk)為狀態(tài)噪聲協(xié)方差矩陣。δ狄拉克函數(shù),當(dāng)k=l時(shí),δkl=1,否則,δkl=0。初始狀態(tài)x(0)是一個(gè)隨機(jī)變量,滿足:
E[x(0)]=x0
(5)
E{[x(0)-x0][x(0)-x0]T}=P0
(6)
式中:x0和P0為初始狀態(tài)的均值和協(xié)方差矩陣。
i=Mr,r∈Z0
(7)

(8)

(9)

(10)
為了便于理解,圖1表示Mr-1和Mr中各個(gè)傳感器采樣率之間的關(guān)系,其中r>1。假設(shè)Mr-1和Mr中各包含3個(gè)傳感器,在Mr-1中,Ξr,1具有最高采樣率,Ξr,3具有最低的采樣率,Ξr,2采樣率在兩者之間。而在Mr中,Ξr,1具有最高采樣率,Ξr,2和Ξr,3采樣率相同且低于Ξr,1,多速率采樣示意如圖1所示。
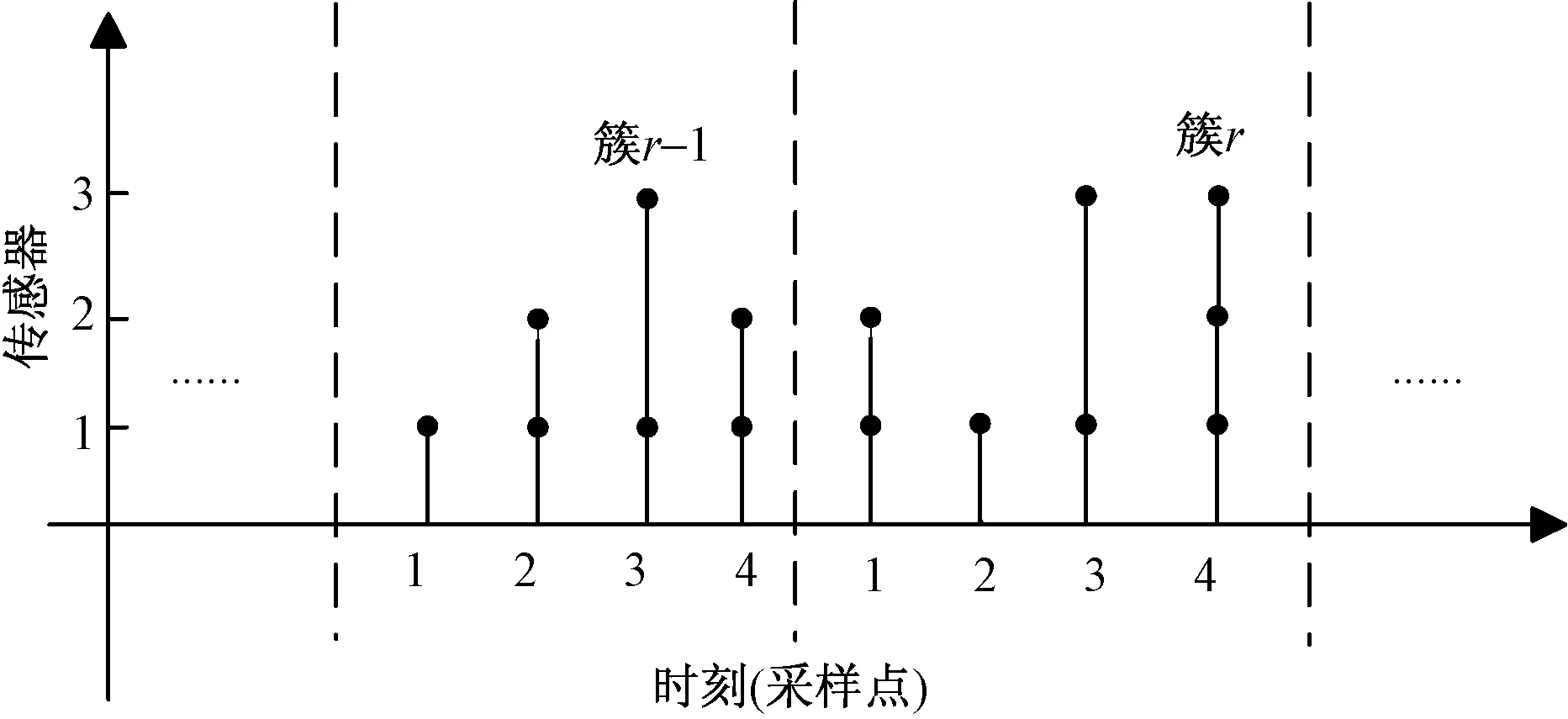
圖1 多速率采樣示意圖Fig.1 Schematic diagram of multi-rate sampling
2 分層融合
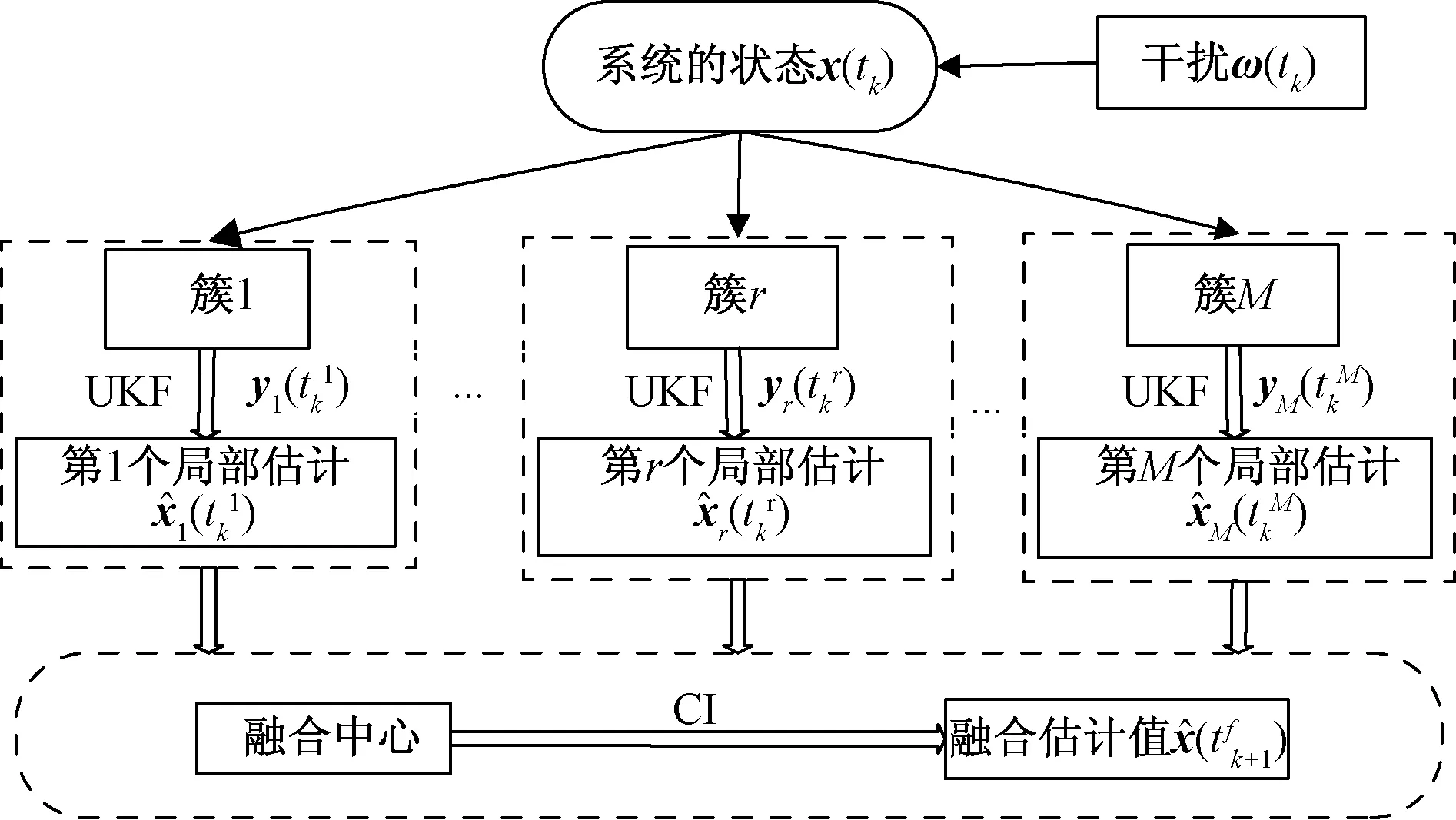
圖2 分層融合算法結(jié)構(gòu)圖Fig.2 Hierarchical fusion algorithm structure diagram
2.1 局部UKF
2.1.1 UKF初始化
設(shè)置初始狀態(tài)x0和初始誤差協(xié)方差矩陣P0。
2.1.2 預(yù)測(cè)
計(jì)算2L+1個(gè)sigma點(diǎn),即采樣點(diǎn),這里的L指狀態(tài)的維度。
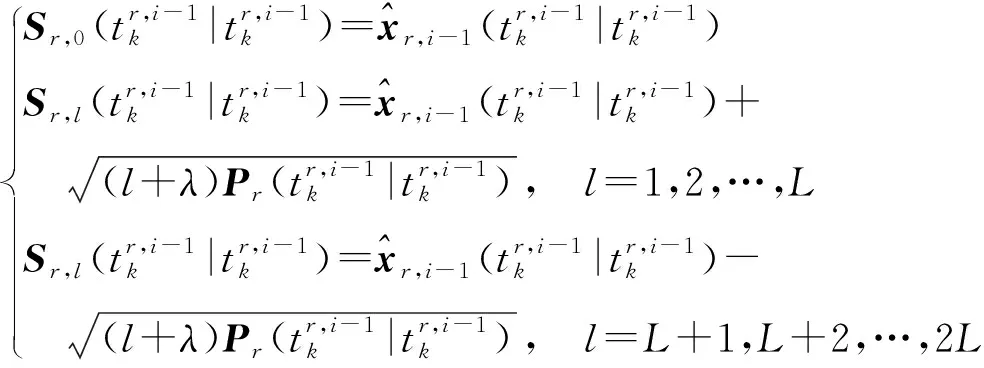
(11)
(12)

(13)
式中:λ=α2(L+ξ)-L;α和ξ為兩個(gè)可調(diào)參數(shù)。

(14)

(15)

(16)


(17)

2.1.3 量測(cè)更新
計(jì)算量測(cè)預(yù)測(cè)值及加權(quán)求和得到的預(yù)測(cè)的均值。
(18)

(19)

(20)

(21)

(22)


(23)


(24)
狀態(tài)更新值以及協(xié)方差更新如下:
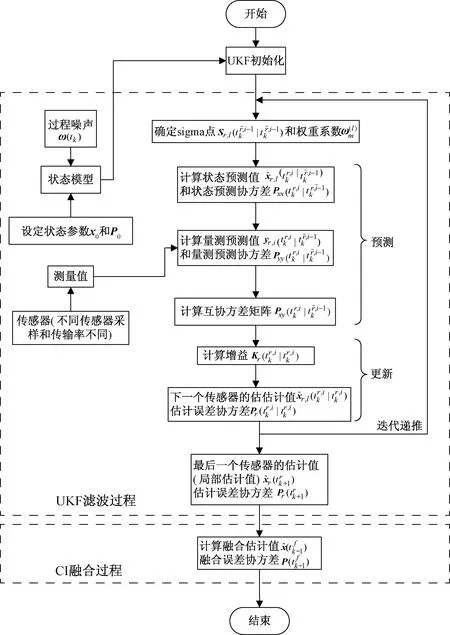
圖3 分層融合估計(jì)流程圖Fig.3 Flow chart of hierarchical fusion estimation


(25)


(26)


(27)

(28)
2.2 融合算法
由于簇中的傳感器有不同的采樣和傳輸速率,因此計(jì)算局部估計(jì)之間的互協(xié)方差矩陣是非常困難的,并不適合真實(shí)的應(yīng)用場(chǎng)景。CI融合算法可以看作基于局部估計(jì)的一個(gè)凸組合[12],只使用局部估計(jì)和局部估計(jì)協(xié)方差產(chǎn)生融合估計(jì),利用CI融合算法不需要計(jì)算互協(xié)方差矩陣的優(yōu)勢(shì),來降低計(jì)算的復(fù)雜度。分層融合估計(jì)流程圖如圖3所示。
(29)

(30)
根據(jù)均方誤差意義下的最優(yōu)性,即
(31)
權(quán)重系數(shù)由次優(yōu)法中相應(yīng)的對(duì)角項(xiàng)確定,以供實(shí)時(shí)考慮,即
(32)
3 仿真驗(yàn)證
通過傳感器采集的目標(biāo)數(shù)據(jù)進(jìn)行融合來證明算法的有效性,將傳感器分成4個(gè)簇,分別為M1、M2、M3、M4。其中,M1包含3個(gè)傳感器,M2包含4個(gè)傳感器,M3包含5個(gè)傳感器,M4包含6個(gè)傳感器。假設(shè)不同簇的傳感器的噪聲不同,設(shè)置M1的3個(gè)傳感器的噪聲協(xié)方差為R1=0.02,M2的4個(gè)傳感器的噪聲協(xié)方差為R2=0.015,M3的5個(gè)傳感器的噪聲協(xié)方差為R3=0.01,M4的6個(gè)傳感器的噪聲協(xié)方差為R4=0.03,設(shè)置目標(biāo)的過程噪聲協(xié)方差為Q=10-3diag(0.05,0.1),不同傳感器的采樣間隔各不相同,仿真結(jié)果如圖4~圖7所示。
均方根誤差(root mean square error, RMSE)定義為

(33)
均方根誤差和(sum of root mean square error, SMSE)定義為

(34)
式中:N表示仿真次數(shù),設(shè)置為N=100;tk表示在tk時(shí)刻第j次仿真的估計(jì)值。
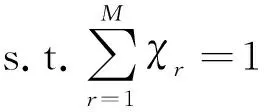
為了提高估計(jì)的精度,采用多速率融合算法進(jìn)行數(shù)據(jù)的融合。圖4所示為真實(shí)軌跡、局部估計(jì)和融合估計(jì)軌跡的RMSE和SMSE對(duì)比,相比局部估計(jì)得到的軌跡,在融合階段通過CI融合算法得到的軌跡更接近于真實(shí)軌跡,說明融合估計(jì)精度更高。圖5為局部估計(jì)和融合估計(jì)誤差對(duì)比。與局部估計(jì)相比,融合估計(jì)得到RMSE最小,在0.1以內(nèi),說明融合估計(jì)的結(jié)果更好。同時(shí),融合估計(jì)得到SMSE最小。
圖6為UKF-CI和EKF-CI的RMSE和SMSE對(duì)比。從圖6可以看出,UKF-CI估計(jì)的誤差小于EKF-CI,結(jié)果表明本文方法效果更明顯。
圖4 真實(shí)軌跡、局部估計(jì)和融合估計(jì)軌跡對(duì)比Fig.4 Comparison of real trajectory, local estimation and fusion estimation
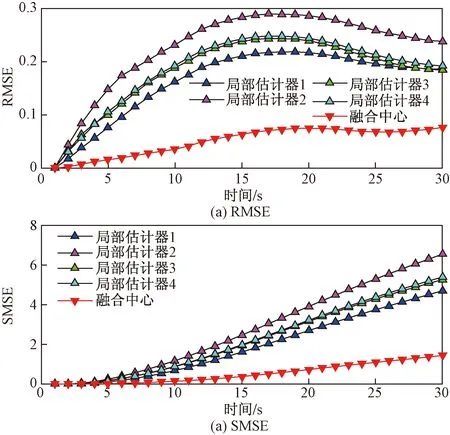
圖5 局部估計(jì)和融合估計(jì)誤差對(duì)比Fig.5 Error comparison of local estimation and fusion estimation
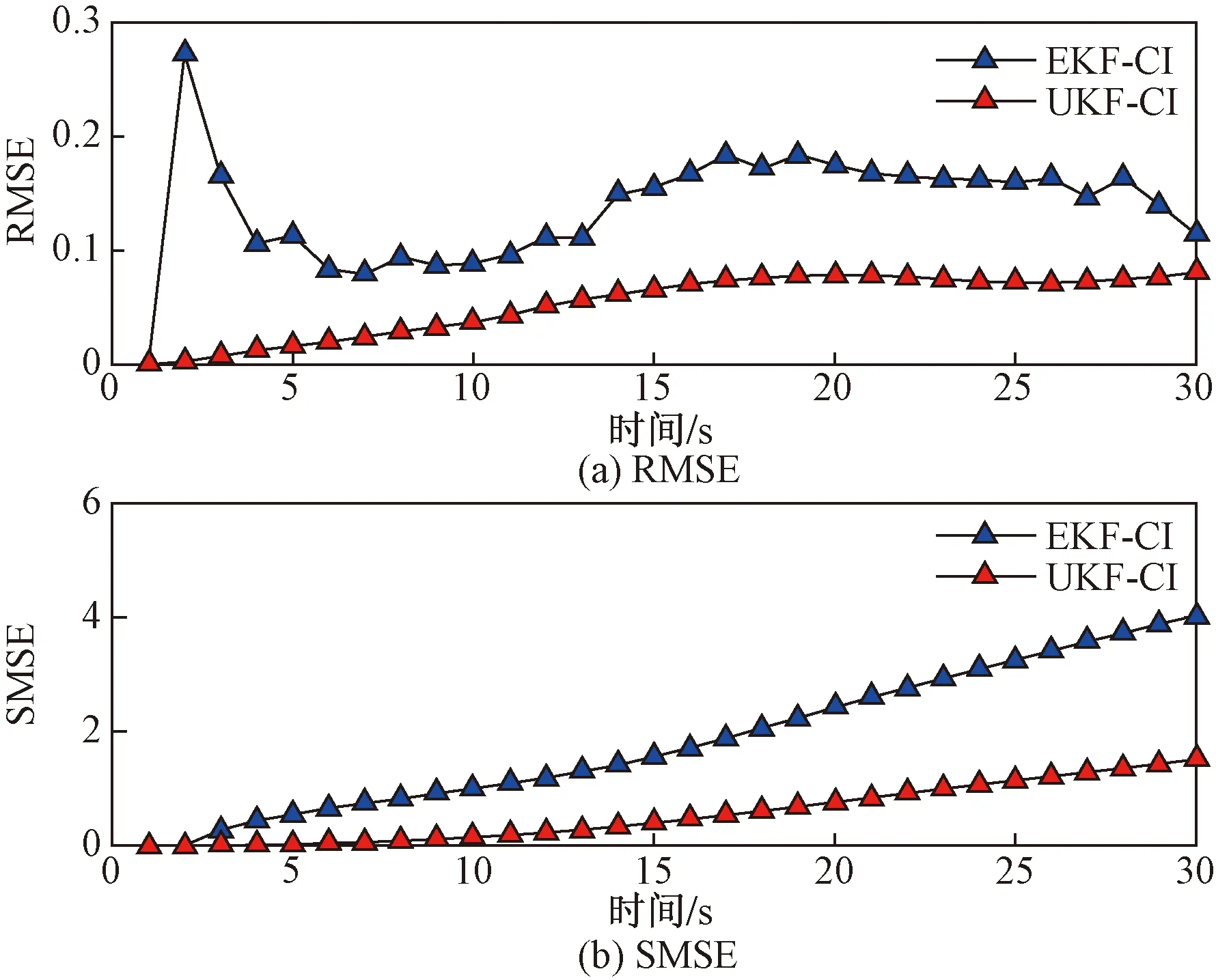
圖6 UKF-CI和EKF-CI的誤差對(duì)比Fig.6 Error comparison of UKF-CI and EKF-CI
圖7為單速率和多速率RMSE和SMSE的比較。從圖7可以看出,局部估計(jì)1-多速率的RMSE和SMSE低于傳感器1-單速率。結(jié)果表明,采用多個(gè)采樣和傳輸速率滿足系統(tǒng)的性能需求。
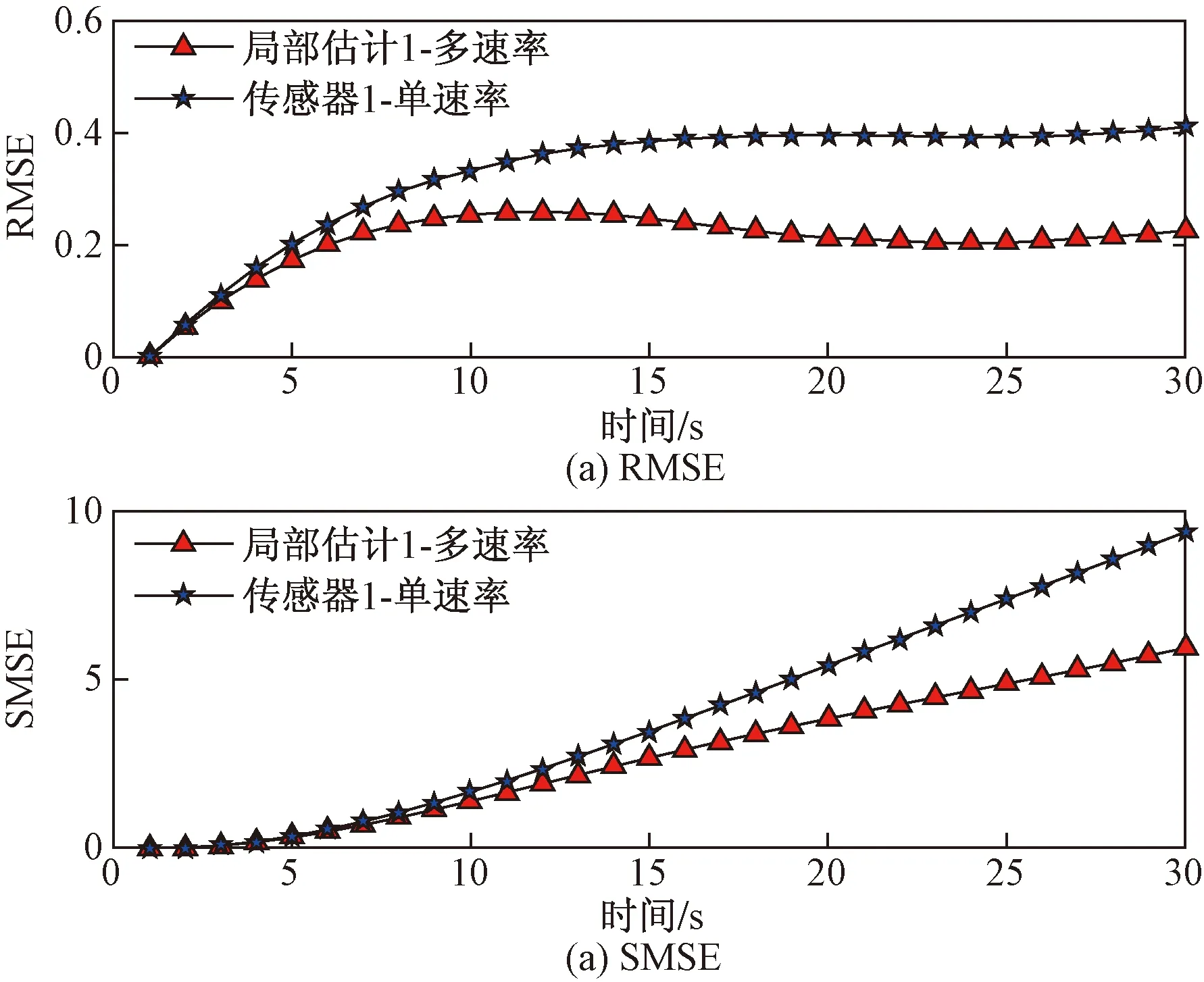
圖7 單速率和多速率誤差對(duì)比Fig.7 Error comparison of single-rate and multi-rate
4 結(jié)論
針對(duì)WSNs在定位跟蹤過程中出現(xiàn)精度低、性能差的問題,提出分層多簇WSNs的多速率跟蹤算法。仿真結(jié)果表明,與局部估計(jì)相比,采用UKF和CI融合算法得到的結(jié)果精度更高。UKF主要處理非線性問題且比EKF的計(jì)算復(fù)雜度低。CI融合算法不需要計(jì)算互協(xié)方差矩陣,因此可以進(jìn)一步減少計(jì)算的復(fù)雜度。采用多個(gè)采樣和傳輸速率滿足系統(tǒng)的性能需求,相比EKF-CI,采用UKF-CI方法效果更好。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
數(shù)學(xué)年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(shù)(2021年4期)2021-07-13 08:58:28
無線電通信技術(shù)(2021年3期)2021-06-08 03:33:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
福利中國(guó)(2015年4期)2015-01-03 08:03:38
