工程船舶動力機械振動響應(yīng)特性分析
2020-11-10 07:16:44沈王俊
科學(xué)與財富 2020年27期
關(guān)鍵詞:振動
沈王俊
摘要:工程船舶動力機械在作業(yè)過程中會產(chǎn)生劇烈的振動運動,振動產(chǎn)生主要由于動力機械中核心動力設(shè)備發(fā)動機內(nèi)部轉(zhuǎn)子運動產(chǎn)生的誤差間隙,在傳導(dǎo)轉(zhuǎn)換作用下導(dǎo)致的橫向與縱向的往復(fù)運動。為了減小振動運動給船舶動力機械造成的損傷,對動力機械的振動響應(yīng)特性進行分析計算,從而獲得最佳的振動響應(yīng)數(shù)據(jù)。但是,受到工程船舶屬性的特殊性影響,常規(guī)的船舶振動響應(yīng)優(yōu)化方法與工程船舶的振動特征匹配度存在差異,導(dǎo)致振動響應(yīng)優(yōu)化效果不理想。鑒于此,本文對工程船舶動力機械振動響應(yīng)特性進行分析,以供參考。
關(guān)鍵詞:工程船;動力機械;振動;響應(yīng)特性
引言
工程船動力機械振動響應(yīng)優(yōu)化問題,提出工程船舶動力機械振動響應(yīng)特性分析方法。通過對振動響應(yīng)計算流程的描述與仿真實驗的優(yōu)化前后響應(yīng)曲線的對比證明,完成對提出研究的設(shè)計,為工程船動力機械振動響應(yīng)研究與控制,提供了新的可行性數(shù)據(jù)。
1動力機械工作狀態(tài)的發(fā)動機隔振模型構(gòu)建
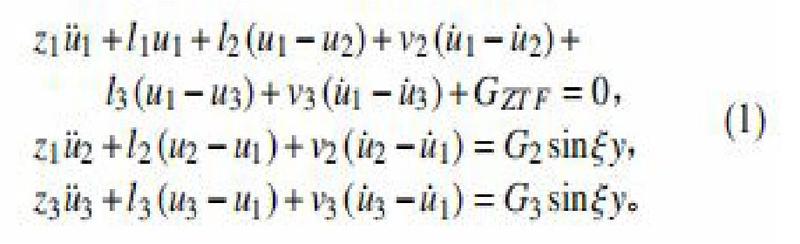
首先,對工程船舶動力機械工作狀態(tài)下的發(fā)動機隔振參量進行模型計算,具體計算步驟如下:設(shè)定船舶動力機械在運行過程中的振動轉(zhuǎn)換量為固定量,則動力機械振動核心發(fā)動機的非線性隔振動力學(xué)函數(shù)為:
1.1? 動力系統(tǒng)轉(zhuǎn)子振動特性分析
完成模型構(gòu)建后,根據(jù)模型反映的振動參量,對動力系統(tǒng)中的轉(zhuǎn)子振動特性展開計算。由上述模型可以看出,在動力機械核心設(shè)備發(fā)動機做振動運動時,其實質(zhì)為轉(zhuǎn)子圍繞核心點往復(fù)做橫向與縱向運動,在平面,縱向運動的作用角為時,轉(zhuǎn)子的抖動幅度最大,即振動值達(dá)到最大值
1.2? 振動波動下轉(zhuǎn)子齒輪咬合量修正
根據(jù)上述計算可知,在傳動軸承的振動作用下,動力設(shè)備的力的傳導(dǎo)介質(zhì)齒輪間存在咬合誤差。在誤差耦合作用下,動力機械的振動橫向與縱向振動位移會增大,最終導(dǎo)致動力機械振動響應(yīng)降低。
2仿真實驗分析
仿真測試場景運行主機1臺,測試運行子機2臺,VDA仿真測試工具。實驗步驟設(shè)置如下:
1)? 將VDA仿真測試工具導(dǎo)入仿真測試場景主機,運行VDA仿真測試工具。
2)? 由VDA仿真測試工具模擬生成200組船舶動力機械設(shè)備運行振動數(shù)據(jù),按照每次測試20個樣本,將200組樣本分為10個測試周期,振動數(shù)據(jù)參量詳見表1。
3)? 將劃分好的測試樣本分別導(dǎo)入測試子機1和子機2。
4)? 將傳統(tǒng)隔振控制方法與提出的隔振控制方法分別導(dǎo)入測試子機1和子機2。
5)? 同時運行測試子機1和子機2,將測試結(jié)果反饋回仿真測試場景運行主機。
3基于剛性安裝機械的激勵力的間接估計
3.1? 前提條件的設(shè)定
在進行基于剛性安裝機器的激勵力間接估計中,必須要確保估算方法的應(yīng)用滿足以下前提條件:第一,振動源與接收結(jié)構(gòu)構(gòu)成的系統(tǒng)可以視為線性系統(tǒng)展開后續(xù)處理;第二,支撐結(jié)構(gòu)并不會對機械內(nèi)部振動的動力特性產(chǎn)生影響;第三,在所關(guān)心的頻段內(nèi),可以將支撐結(jié)構(gòu)與機械接觸部位認(rèn)定為點接觸。
3.2? 估算的實際過程
相關(guān)人員在展開建間接估計前,需要先完成必要數(shù)據(jù)的獲取。第一,在機械的實際安裝前,要完測量裸基座的加速度導(dǎo)納。此時,響應(yīng)測量位置可以選取任意位置,但是,相關(guān)人員要注意控制響應(yīng)位置的數(shù)量,確保其高于激勵位置的數(shù)量。在這樣的條件下,能夠獲取最小二乘解。在完成加速度導(dǎo)納全部測量后,要將數(shù)據(jù)構(gòu)成加速度導(dǎo)納矩陣(用[A]表示)。第二,在機械正常運行的條件下,要對加速度相應(yīng)的相對相位以及幅度展開測量。在這一過程中,響應(yīng)測量位置要與上述測量中的位置相同,并將測量的響應(yīng)構(gòu)成響應(yīng)矢量(用{a}表示)。
4優(yōu)化VMD技術(shù)在動力機械狀態(tài)監(jiān)測系統(tǒng)中的應(yīng)用
4.1? 船舶動力機械狀態(tài)的監(jiān)測方法
動力機械是船舶不可或缺的組成部分之一,這是一個技術(shù)綜合體,通過應(yīng)用該系統(tǒng),在船舶航行時,能夠保持穩(wěn)定的運行,需要通過相應(yīng)的方法對其運行狀態(tài)進行監(jiān)測。常規(guī)船舶的動力機械包括發(fā)動機和液壓系統(tǒng),不同的動力機械監(jiān)測方法有所差別。比如,發(fā)動機常用的監(jiān)測方法有瞬時轉(zhuǎn)速監(jiān)測技術(shù)。
4.2? 監(jiān)測系統(tǒng)的設(shè)計思路
為了實現(xiàn)對船舶動力機械狀態(tài)進行有效監(jiān)測,在監(jiān)測系統(tǒng)加入VMD功能。在開發(fā)階段,可以充分集合模塊化的設(shè)計思路,設(shè)計船體結(jié)構(gòu)、機電裝置通信網(wǎng)絡(luò)、導(dǎo)航系統(tǒng)等。動力機械可以有效將各個機電一體化系統(tǒng)進行結(jié)合,并將狀態(tài)監(jiān)測功能融合到功能塊中。
對于船舶動力機械狀態(tài)監(jiān)測系統(tǒng)而言,獲取相關(guān)的信息源是關(guān)鍵環(huán)節(jié),這里的信息源基本上都是船舶上動力機械的運行狀態(tài)參數(shù)。在對監(jiān)測系統(tǒng)進行模塊化設(shè)計時,需要將一些內(nèi)容監(jiān)控過程模塊化。監(jiān)測方法是整個監(jiān)測系統(tǒng)的核心,由于監(jiān)測方法比較多,所以要劃分為不同的模塊,它的結(jié)構(gòu)具有可變的特點,規(guī)模大小可根據(jù)實際應(yīng)用需要進行調(diào)整,靈活性更強。以油液粘度監(jiān)測設(shè)備為例,它本身是一個獨立的裝置,但卻可以加入到在線油液監(jiān)測模塊當(dāng)中。
4.3? VMD技術(shù)在監(jiān)測系統(tǒng)中的應(yīng)用
在船舶動力機械狀態(tài)監(jiān)測系統(tǒng)的開發(fā)過程中,可將VMD技術(shù)運用到系統(tǒng)分析當(dāng)中,以此來加快求解速度,提高分析效率。在VMD技術(shù)中,可以有效改善船舶動力機械狀態(tài)監(jiān)測系統(tǒng)的有效性,對船舶的各個工作狀態(tài)做到實時高效的分析,從而反饋到控制系統(tǒng)中,對動力系統(tǒng)的工作狀態(tài)具有一定的約束作用。但是,在船舶的動力機械工作環(huán)境中,還包含了比較多的內(nèi)容,由于本文研究的是系統(tǒng)開發(fā),故僅從物理環(huán)境的角度進行分析,不考慮其他環(huán)境因素。物理環(huán)境包括現(xiàn)存的系統(tǒng)、技術(shù)標(biāo)準(zhǔn)、現(xiàn)有的科技水平以及自然環(huán)境等,具體分析時,可將這些約束條件轉(zhuǎn)化為變分問題,借助VMD技術(shù)進行求解,從而快速得到分析結(jié)果。而在系統(tǒng)監(jiān)測目標(biāo)的分析中,重點是目標(biāo)集的建立,這是一個逐級逐項對總目標(biāo)進行落實的過程,所以需要先對總目標(biāo)進行分解,在分解時,可以運用VMD技術(shù),將總目標(biāo)分解為多個分目標(biāo),并進行具體化、客觀化,在此基礎(chǔ)上對目標(biāo)的動態(tài)過程進行確定,據(jù)此對分目標(biāo)進行協(xié)調(diào),實現(xiàn)并行高效監(jiān)測的目標(biāo)。因船舶動力機械狀態(tài)監(jiān)測系統(tǒng)的目標(biāo)因素比較多,加之各個目標(biāo)之間存在著非常復(fù)雜的關(guān)聯(lián)性,所以很難使系統(tǒng)達(dá)到最優(yōu)。在構(gòu)建系統(tǒng)時,只需要運用VMD技術(shù)尋找次優(yōu)解即可,無需追求最優(yōu)解,以免造成計算量增大。
5實驗測試
將提出設(shè)計工程船動力機械振動響應(yīng)特性分析方法導(dǎo)入仿真測試工具中,進行振動響應(yīng)性能測試。對輸出的振動響應(yīng)曲線同優(yōu)化前的振動響應(yīng)曲線進行對比,根據(jù)對比結(jié)果得出實驗結(jié)論。2條振動響應(yīng)曲線所對應(yīng)的數(shù)據(jù)對比,可看到提出方法在工程船動力機械振動響應(yīng)速度較優(yōu)化前響應(yīng)速度提升明顯。由此足以證明提出設(shè)計的可行性與有效性。
結(jié)束語
為了保證船舶航行性能及整個控制系統(tǒng)的運行安全,必須對整個動力系統(tǒng)進行特別的設(shè)計,才能有效提高動力傳輸控制的穩(wěn)定性和可靠性。因此,對動力機械進行監(jiān)測顯得尤為必要。現(xiàn)有的狀態(tài)監(jiān)測方法種類較多,方法不同監(jiān)測所得的結(jié)果有所區(qū)別。為提高監(jiān)測結(jié)果的準(zhǔn)確性,可將各種監(jiān)測方法融合到一起,利用模塊化的思路,開發(fā)1套功能強大的監(jiān)測系統(tǒng),并在系統(tǒng)分析時,對VMD技術(shù)進行合理運用。
參考文獻:
[1]?? 聶英釗,張易豪.船舶動力機械隔振設(shè)計中的功率流方法與效果評估的探討[J].科技經(jīng)濟導(dǎo)刊,2019,27(16):57+48.
[2]?? 劉偉,萬志勇.船舶動力機械螺旋槳在不同湍流的動力性能仿真[J].艦船科學(xué)技術(shù),2019,40(20):4-6.
[3]?? 張云根.基于粒子群的船舶動力機械空蝕優(yōu)化控制[J].艦船科學(xué)技術(shù),2019,40(20):76-78.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(理學(xué)版)(2014年3期)2014-03-01 04:21:00
