基于激光引信的回波仿真及抗干擾研究
2020-11-11 09:01:22黃澤青
激光技術 2020年6期
關鍵詞:信號
黃澤青,賀 偉
(西安郵電大學 通信與信息工程學院,西安 710100)
引 言
激光引信具有抗干擾能力強、系統體積小、實時測距精度高且安全性有保證等優點,在戰術導彈領域取得了普遍的應用。通常在激光回波信號里含有目標特征、反射特點等關鍵有用信息,但提取目標回波特征對實驗場地要求較高,回波信號中不僅存在大量雜波,激光引信也易受到自然環境如云霧、沙塵較大影響。而且由于探測目標體型較大,現場難以做到多次重復實驗。國內外對激光引信回波信號仿真及抗干擾開展了大量研究,LI提出將回波信號功率峰值對應目標特征,以此實現目標回波仿真。ZHANG等人提出一種基于蒙特卡羅法的激光引信回波信號仿真技術[1]。TAN等人提出一種基于雙向反射函數的水下激光引信回波仿真方法[2]。本文中根據目標的表面材料和所得雙向反射分布函數(bidirectional reflectance distrbution function,BRDF)實驗數據,結合遺傳優化算法來進行建模[3-4],最后提出一種基于回波包絡上升速率的區域聯合判別方式,研究了在理想環境和云霧環境下目標的點回波特征。
1 激光引信回波仿真基本原理
主要的激光引信目標回波信號計算原理是通過二次曲面(圓錐面和圓柱面)法來求解目標面元上的回波功率[5]。首先基于目標實測BRDF數據以及目標表面的材料特性來進行建模,對目標表面面元劃分至幾千到數萬個微面元[6]。根據彈目交會狀態下激光引信的各項參量,通過對微面元的信號反射計算其功率,再對其做積分運算,求得所有微面元的激光雷達橫截面(laser radar cross section,LRCS)[7],疊加各個分解小目標的回波信號,得到照射面元的引信回波功率,最終通過積分求得激光引信接收到各個通道的回波信號[8]。
2 激光引信發射與接收波束模型
假設坐標系(Oxmymzm)的原點在激光引信的中心,Oxm軸沿橫軸并取方向為正,Oym軸垂直于Oxm軸方向向上,Ozm軸和橫軸于同一平面且構成右手規則。設γ1為發射光路內傾角,Δγ1為視場成像角;γ2為接收光路內傾角,視場寬度為Δγ2[9]。其中,4組發射與接收裝置共同構成激光引信,每組接收與發射裝置分布均勻且距離相近。激光引信發射脈沖電流,再通過引信發射裝置產生激光束,在系統的驅動下,激光束在彈軸平面形成90°的視場角,發射光束扁平,象限光學發射系統使其在目標周圍被看作一個圓錐形探測視場。如圖1所示。
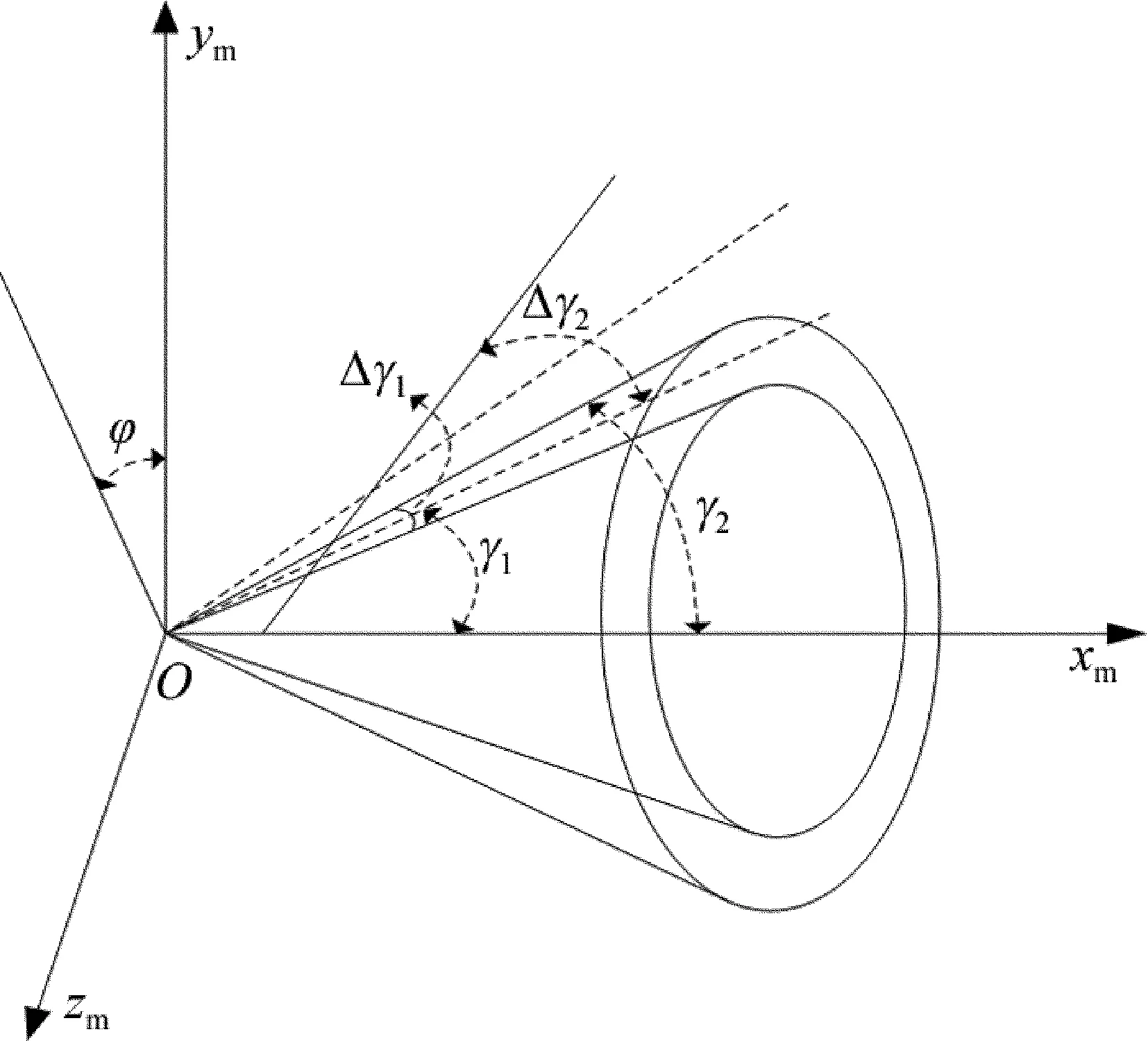
Fig.1 Schematic diagram of laser fuze emission field
3 BRDF統計建模
3.1 雙向反射分布函數
通常理想目標表面材料的光散射特性復雜,理論上由粗糙面散射理論可獲知實驗數值,但實際上很難提供計算所需的粗糙面元微觀特性如相關長度、統計分布等。因此,通常使用雙向反射分布函數BRDF來描述目標面元的光散射特征。BRDF所描述的光散射特征分布和粗糙面元的微觀特性、材料介電常數、入射光波長等因素緊密聯系。通常粗糙面元會被看作是由大量微面元構成,且所有微面元的反射都遵循菲涅耳效應[10-11]。
如圖2所示,對于小面元dS,入射光源方向為(θi,φi),探測器的觀測方向為(θr,φr)。其中θ是天頂角,φ是方位角,z是代表粗糙面元的法線。BRDF定義為入射到粗糙表面的光輻射照度與光輻射亮度相聯系,在圖中表示為dLr(θi,φi,θr,φr)與沿(θi,φi)方向入射到被照射面元的亮度dEi(θi,φi)之比,即:

(1)
式中,fr(θi,φi,θr,φr)可以簡化為fr(θi,θr,φ),φ=φr-φi為小面元坐標系內入射角與反射角的差值。
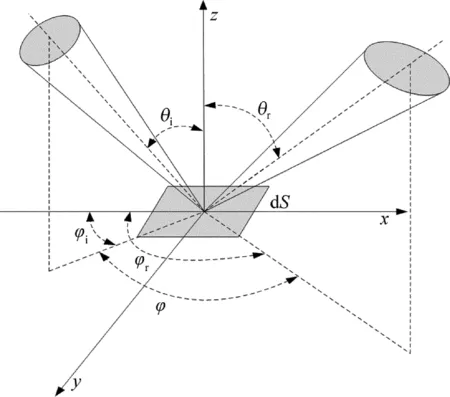
Fig.2 BRDF geometric diagram
3.2 五參量模型
根據粗糙面元的BRDF樣片材料,可以獲知樣片表面的光散射特征。但由于直接獲取樣片BRDF很困難,實驗次數有限,不能多次重復實驗獲取數據。一般情況下是采用所得到的部分BRDF實驗值擬合五參量統計模型,五參量模型基于粗糙面元的目標光散射計算獲得,最終給出了BRDF的五參量統計模型[12]:

(2)
式中,kb,kd,kr,a,b為待定參量。kb為鏡反射系數,kd為漫反射系數,kr為與微面元表面法線分布函數相關的參量,a和b是與表面菲涅耳函數相關的系數。根據能量守恒定律,kd+kb≤1,θi,θr,φr分別為入射角、散射角和相對方位角,γ為微觀平面上本地坐標系的入射角。(2)式前半部分表示的是雙向反射分布函數的相干散射,其中粗糙表面上偏振二向分布函數用kr2×cosα/[1+(kr2-1)cosα]標記,α為微面元平面法線與粗糙面元平面法線的夾角[13-14],菲涅耳反射系數用exp[b(1-cosγ)]來表示,遮蔽系數用G(θi,θr,φr)來表示。
遺傳算法的收斂速度極快,它是一種全局優化概率算法,可以很快找到最佳解。而且各態歷經性使其能夠有效進行全局優化搜索,減少計算時間,保證算法有效性基礎上得到參量值。因此可以通過遺傳算法來計算五參量模型的參量值[15]。選取樣片1和2的實測BRDF數據來進行優化建模,波長和五參量如表1所示。
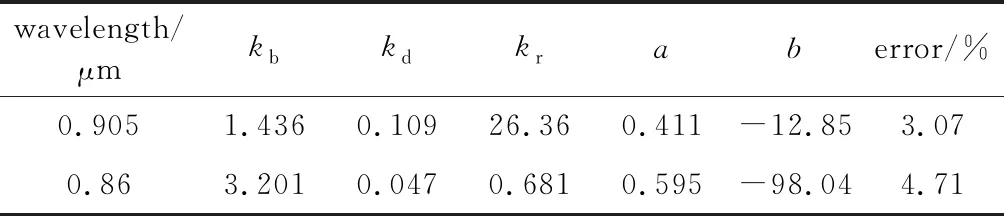
Table 1 Five parameters data table of sample piece
選取不同入射波長的BRDF實測數據來進行優化建模并與實測數據相比較[16],入射波長分別為0.86μm和0.905μm。如圖3所示,實線為實測數據,虛線為五參量模型計算結果。可知對于不同材料的BRDF,目標回波的形狀基本相似,幅值不同。而且隨著入射角的增大,峰值功率逐漸增大。由于脈沖激光引信的探索過程是高速變化的,其入射角的波動范圍值較廣。因此一般檢驗時應選擇在較大入射角的情況下進行[17-18],以便回波信號可以在能量較少時也能夠成功實現檢測。模擬曲線能很好地符合實驗數據,證明了建模結果的正確性。
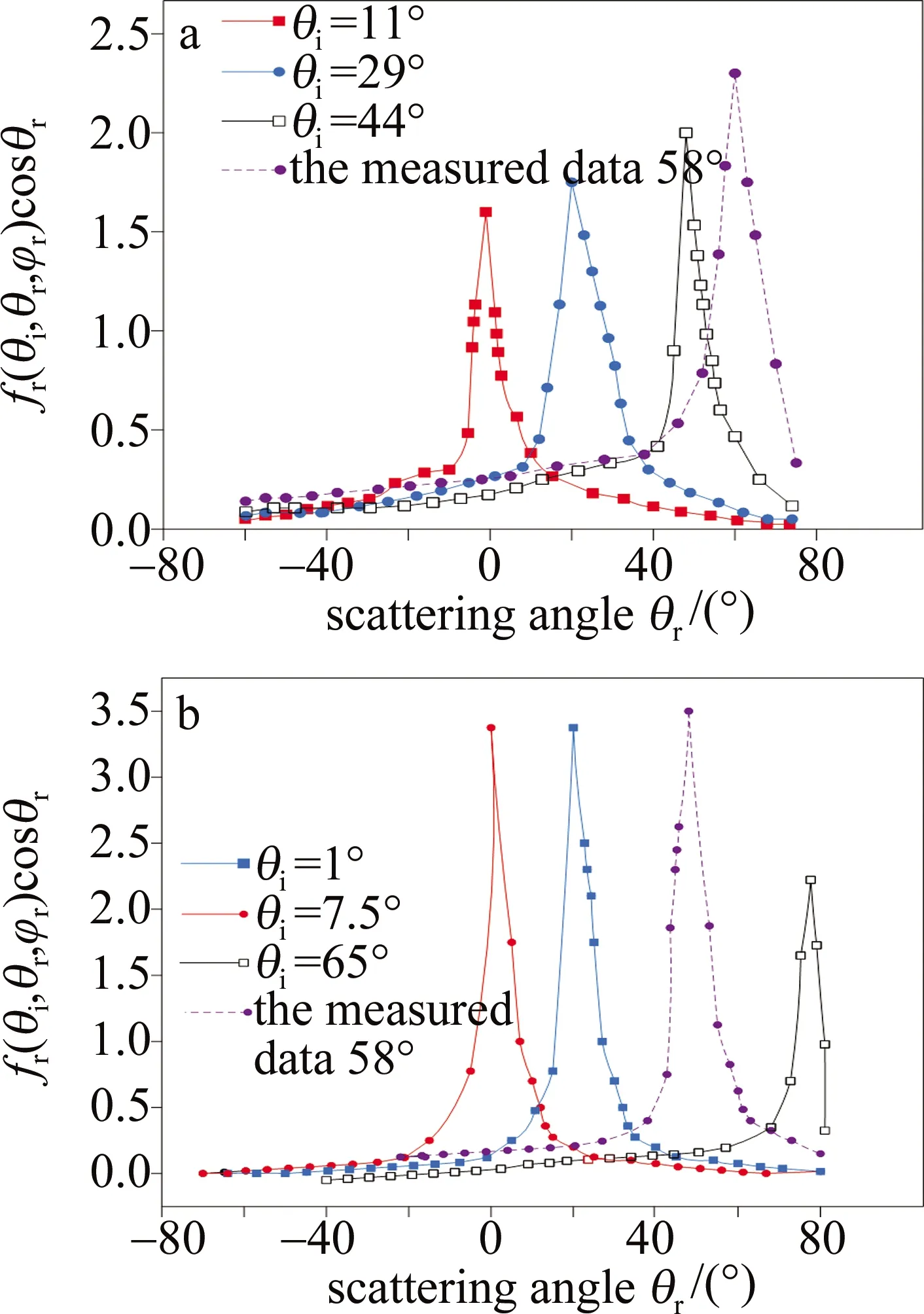
Fig.3 Schematic diagram of comparison between measured values and model values
4 系統時刻鑒別方法
本文中系統探測裝置最大測量范圍為為0.1m~7m,因此對回波時刻的鑒別提出了很高的要求。激光引信回波接收系統包括光-電轉換單元和回波信號處理單元。在光-電轉換單元中,由于常見的回波時刻鑒別電路中需設定閾值電平,通過信號波形變換形成上升沿很陡的信號用于回波時刻判讀,因此當目標反射面積變化時,由于信號幅值變化會產生較大誤差,波形如圖4a所示。
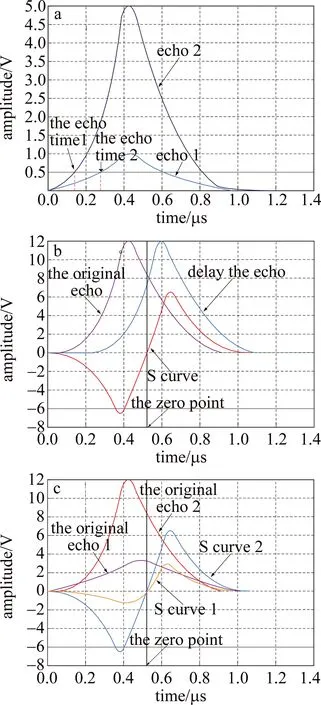
Fig.4 Echo signal detection waveform
需要特別說明的是,由于系統對回波時刻的鑒別提出了很高的要求,對回波時刻判讀的精度要求足夠高,因此本文中采用0.1μs作為時間間隔。雖然通過雙閾值前沿判定和誤差補償的固定閾值鑒別等方法能夠一定程度上改善回波時刻依賴回波幅值這一問題,但也存在精確度不高等缺點[19]。因此系統采用恒定比率過零檢測方法對回波時刻進行判別,與其它方法相比,其鑒別精度高,且不依賴回波信號上升幅值。當輸入信號進入鑒別電路時會被分成無差異兩路信號,其中一路信號的延遲時間是脈沖寬度的一半,而另一路信號則以原始幅度和相位值傳輸,兩路信號相減得到的信號形狀呈橫向的S形,信號前半部分為負信號,然后過零點變成正信號。檢測波形圖如圖4b所示。
由于橫向S形信號在通過零點位置時不會受到信號的幅度變化和外部干擾影響,因此可以把它當作脈沖時刻鑒別的一個穩定鑒別點,其檢測波形如圖4c所示。
5 實驗與分析
針對引信工作中的實際環境,如在云煙環境中,結合脈沖激光發射系統信號處理單元對目標回波的判別,提出了基于回波包絡上升速率的區域聯合判別方式,并通過實際的實驗測試得出數據。測試實驗中用表面反射率接近實體目標的白板代替,小型目標表面反射率約為0.33,大中型目標表面反射率約為0.9,具體以不同尺寸白板來區分各型號的探測目標,云煙環境用煙霧機產生的煙霧模擬。由于研究的引信探測視場呈環形,則每一路形成的探測視場角為90°。因此,設置3個測試角度,分別為中心點0°、左側45°和右側45°。
如圖5所示,通過背景板可以看到,激光光束照射的視場角以對稱形式左右可分別到達45°,測試得到的光束光斑分布均勻。系統設計的小型目標作用距離為3m,中型目標作用距離為5m,大型目標作用距離為7m。在沒有干擾下,不同場景目標測試記錄數據如表2和表3所示。

Fig.5 Laser beam diagram of emitter
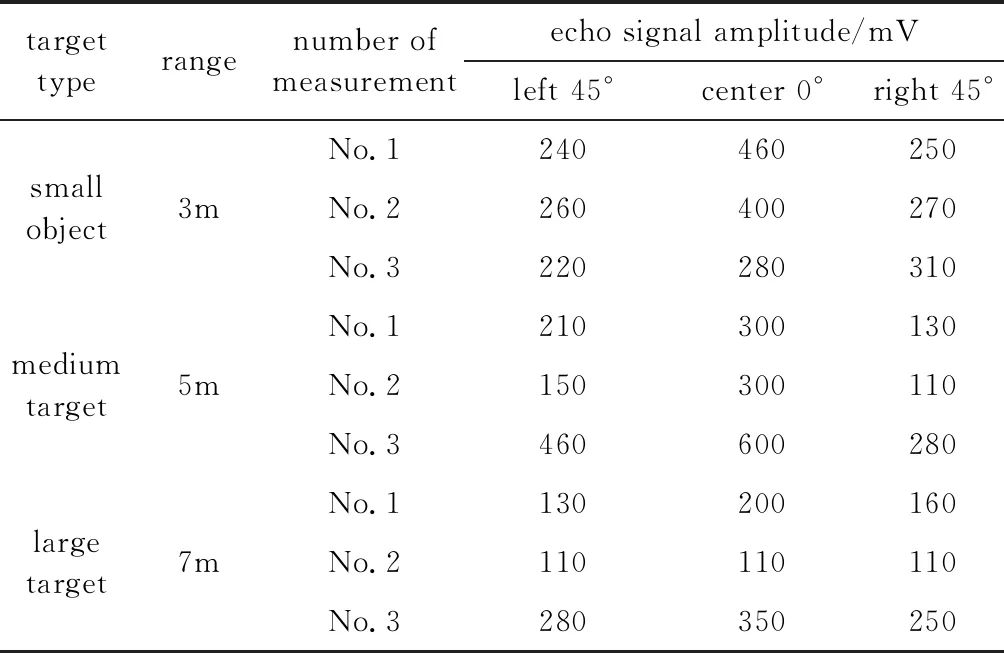
Table 2 Objective test data record sheet under ideal environment
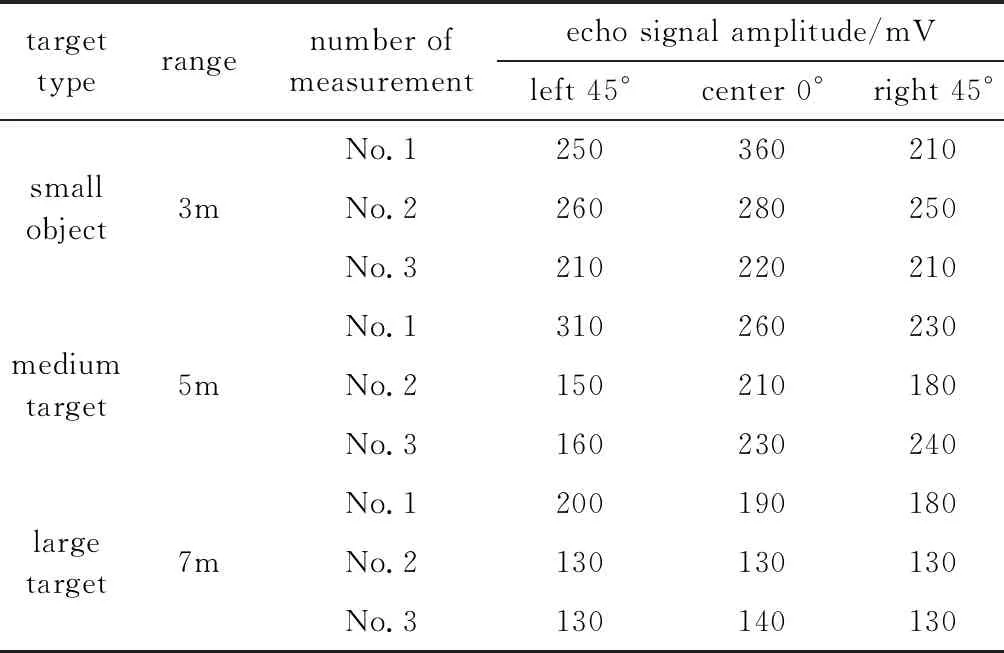
Table 3 Objective test data record sheet under cloud and smoke environment
將模擬目標白板在不同作用距離點上下移動,找到反射點,通過示波器顯示反射回波,讀取回波幅值。利用數據記錄儀記錄回波包絡圖如圖6a所示。
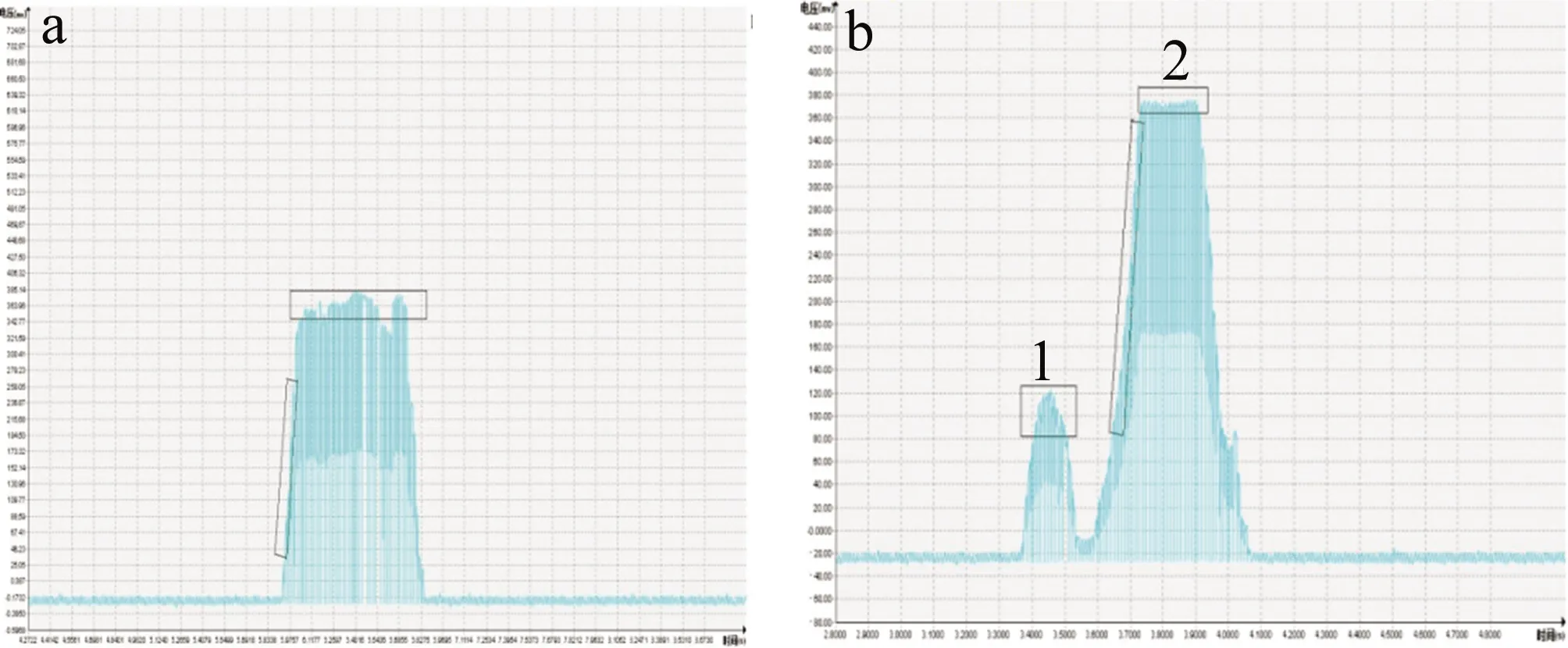
Fig.6 Echo envelope diagram under different scenarios
從記錄結果可以看到,在中心位置即發射激光直射到目標時,發射回波的幅值最大,位于探測視場兩側的光束能量略有下降。由于作用距離變大,反射回波幅值會降低,這符合激光傳輸能量的變化趨勢。圖中矩形框內包絡的上升速率呈遞增趨勢,到達峰值后穩定持續一段時間,包絡走勢滿足對目標識別的判定準則。
使用煙霧機在裝置探測視場內間隔噴出煙霧來模擬實際環境,測試結果如表3所示。
在實際環境中,系統正常工作,比較表2數據,回波幅值大小有所降低,偏差約為65.3%。這是因為激光脈沖抵抗干擾而損失能量,但在判定準則的應用下依然實現對目標的判定。利用數據記錄儀記錄此測試環境下的回波包絡如圖6b所示。
與圖6a相比,系統探測到的回波包絡圖出現明顯的差異,在探測光路中脈沖激光由于實際環境如云煙的影響,激光反射率較低,因此,系統接收到此部分反射回波后作出的反應會出現小幅的的包絡響應。當激光穿過云煙到達目標表面時,反射回波到達接收系統后會出現幅度較大的反應目標的包絡圖形。從包絡圖中可以明顯看出,目標形成的包絡在前沿上升速率較快,且達到峰值后穩定持續一段時間。對比圖中方框1和方框2可知,干擾形成的包絡在達到某一峰值后會迅速下降,不會形成持續穩定得包絡現象,因此,系統在探測過程中依據判定準則較好地實現了抗干擾。
6 結 論
為了在復雜環境下提取目標回波特征信息,傳統方法主要通過對目標反射回波信號的功率值來仿真,且常常忽略了云煙環境產生的干擾。本文中結合遺傳算法與五參量統計模型對目標進行建模,分析比較了幾種常用時刻鑒別方法,并選擇了恒定比率過零檢測方法,通過仿真檢測回波得知該方法可以很好地判別脈沖時刻。最后提出了一種基于回波包絡上升速率的區域聯合判別方法,加入干擾因素后,通過對比得到了探測視場不同角度點回波幅值。該方法通過對回波包絡走勢的判別實現對目標的判定,且在云煙環境中實現了抗干擾,提高了回波信號仿真的精確度。由于系統的測量精度和穩定性還有進一步提升的可能,對于回波信號及其抗干擾在以后的研究工作中還需體現其多樣性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06