無人機電力巡檢中的輸電線路斷股檢測與定位
2020-11-12 08:01:16劉長銀王義春侯艷權宋人杰李英杰
黑龍江電力 2020年4期
劉長銀,王義春,侯艷權,宋人杰,李英杰
(1.國網黑龍江省電力有限公司七臺河供電公司,黑龍江 七臺河 154600; 2.東北電力大學 計算機學院,吉林 吉林132012)
0 引 言
輸電線路是電力系統中最基本的結構[1],它的作用是輸送電能,將發電廠、變電站和用戶連接起來。由于電力輸送容量和輸送距離迅速增長,大容量遠距離的輸電線路投入運行[2-4],這對輸電線路安全性提出了更高的要求。傳統的輸電線路具有跨越區域范圍廣、所處地形復雜、自然環境惡劣以及輸電線路設備長期暴露在外等特點[5-7],使得輸電線路非常容易發生斷股、磨損或有附著物等問題,直接影響到電力的安全運輸。為確保輸電線路的安全穩定運行以及輸電可靠性,需要及時對輸電線路進行定期巡檢。
目前利用無人機進行高壓輸電線路的巡檢和維護的技術在發達國家已經相對成熟[8],該技術極大地降低了工人的勞動成本和勞動強度,提高了巡檢過程中的工作效率。在輸電線路故障檢測領域中,相關人員進行了很多理論研究。文獻[9]應用小波奇異性檢測理論分析了輸電線路故障定位方法,針對輸電線路故障,能基本滿足定位的準確性,但采樣信號中的噪聲消除以及分解尺度和層數的選取,會直接影響到故障點的定位;文獻[10]提出了一種基于隨機矩陣譜分析的輸電線路故障檢測算法,該算法不受故障位置、非全相運行、潮流轉移影響,但需要大量數據構成故障檢測矩陣,很難達到快速識別的要求;文獻[11]提出一種基于離散余弦變換算法的航拍影像中輸電導線快速識別技術,通過對圖像進行輸電直線檢測,依據導線寬度的變換同正常導線做比較,識別出輸電線路斷股,但并沒有實現對輸電線斷股處的定位。
本文提出一種通過圖像處理技術對輸電線路缺陷進行檢測與定位的方法,用來解決輸電線斷股故障問題。該方法將巡檢圖像經過預處理轉換為灰度圖像,使用改進的Canny算法獲取到圖像邊緣,結合Hough算法提取到輸電線導線邊緣。通過邊緣跟蹤算法遍歷直線得到對應直線的最大連通邊緣,與直線做“或”運算得到分叉斷股。計算斷股邊緣直線的夾角與距離,通過與設定經驗閾值的比較,實現輸電線路斷股故障的識別與定位。
1 輸電線斷股形態特征與分析
巡檢圖像中的輸電導線如圖1所示。輸電線路中的斷股有以下特點:
1) 依據輸電線路形態特征,很容易提取到輸電線路邊緣直線。
2) 斷股與輸電線路有連接點。
3) 若輸電線路發生斷股,斷股與輸電線直線連接處存在夾角。
4) 若輸電線路發生斷股,斷股邊緣點到輸電線路直線存在最大距離。

圖1 輸電線路斷股
通過分析上述輸電線路斷股的特征,提出輸電線路斷股故障檢測與定位方法。主要分為5個部分,處理方法流程如下:
1) 圖像預處理:將輸電線路RGB彩色圖進行灰度化處理,得到對應的灰度圖像。
2) 獲取輸電線路直線:利用改進的Canny邊緣提取算法提取圖像邊緣,經由霍夫變換得到輸電線路的擬合直線集,計算直線與x軸的角度集。
3) 確定待定斷股區域集:遍歷直線集中的每條直線,以直線一端像素為起始點,采用8-鄰域邊緣跟蹤算法求得包含遍歷直線的最大連通邊緣,與遍歷直線進行“或”操作,記錄斷股故障候選區域。
4)故障識別:遍歷待定斷股集中的斷股邊緣像素,以斷股一端邊緣點為起點計算起點與遍歷點形成的角度,與對應直線角度做差值運算,通過差值與設定的經驗閾值比較,判斷是否為斷股。
5)通過計算起點像素與遍歷點像素到輸電線路邊緣直線的最大距離和最大高度,完成故障點的定位。
所得預處理結果如圖2所示。

圖2 輸電線路灰度圖
2 相關算法
2.1 改進的Canny邊緣檢測算法
傳統Canny邊緣檢測算法是利用高斯濾波器對圖像進行平滑噪聲,由于固定區域的像素灰度值差值較大,高斯濾波在去掉噪聲的同時,也使得圖像邊緣模糊,造成邊緣信息減弱,在后續處理中可能會漏掉一些需要的邊緣,特別是弱邊緣和孤立的邊緣,可能在雙閥值和聯通計算中被剔除。
針對上述問題對Canny邊緣檢測算法進行改進優化,利用雙邊濾波代替高斯濾波對輸電線圖像進行去噪操作。在保有降低圖像噪聲的同時,也能保留更多的弱邊緣細節信息。
在雙邊濾波中,輸出像素的值依賴于鄰域像素值的加權組合,且同時考慮了空間域與值域的差別[12],雙邊濾波器的數學表達式為
式中:f(k,l)為圖像窗口內的像素灰度值;ω(i,j,k,l)為權重系數。
權重系數ω(i,j,k,l),取決于定義域d(i,j,k,l)與值域核r(i,j,k,l)的乘積。而權重系數、定義域以及值域核的數學表達式為
經改進的Canny邊緣算法對輸電線路灰度圖像進行處理后,得到的邊緣圖像結果如圖3所示。
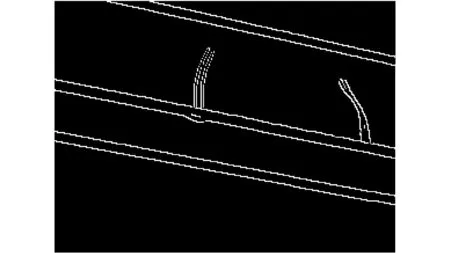
圖3 輸電線路邊緣圖像
2.2 霍夫變換提取直線
霍夫(Hough)變換是圖像處理中從圖像中識別幾何形狀的基本方法之一[13]。它的核心思想是采取變換兩個坐標空間的方式,把在某一空間中呈現相同形狀的直線轉化為另一坐標空間的某一峰值,將提取直線轉換成統計峰值的形式。采用極坐標參數空間進行直線檢測。在極坐標系中,直線可以表述為以下形式:
ρ=xcosθ+ysinθ
對上步經過Canny邊緣檢測處理后得到的圖像進行Hough直線變換處理,獲得輸電線對應的直線集L={l1,l2,…,lm}。
直線上的任意兩點(x1,y1)、(x2,y2)滿足

3 檢測定位的方法與思路
通過改進的Canny邊緣算法得到了連續的邊緣二值圖像,采用Hough變換提取到了輸電線直線,以兩者為前提,進行輸電線路斷股缺陷的識別與定位,方法與思路如下:
1) 遍歷直線集L中的直線li,設定該直線一端像素為起始點,通過邊緣跟蹤算法求得包含遍歷直線的最大連通邊緣。最大連通邊緣與遍歷直線進行“或”操作,得到直線上的分叉邊緣,即待定斷股邊緣,構建待定斷股邊緣集Ei={e1,e2,…,en}。實驗中待定斷股邊緣如圖4所示。

圖4 待定斷股邊緣
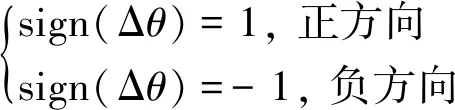
邊緣跟蹤算法采用8-鄰域搜索像素點邊緣,設定順時針方向遍歷8個鄰近像素以后,定位到下一個像素點,下一次遍歷時,就以下一個像素點為中心像素點,直至8鄰域都不存在輪廓。8鄰域如圖5所示。
圖5 8-鄰域示意圖
2) 判斷是否斷股。根據待定斷股邊緣的像素個數來找到斷股段的起點與終點。設經過待定斷股邊緣的白色像素點個數為count,設(xi,yi)為經過斷股邊緣的第一個像素點,從該點遍歷待定斷股像素。以左上角為坐標原點,向右為x正方向,向下為y軸正方向建立直角坐標系。設(x0,y0)為起點,(xj,yj)為遍歷待定斷股邊緣點,起點與待定斷股邊緣像素同x軸所成夾角為φ,依據計算式φ=arctan{(yj-y0)/(xj-x0)},計算斷股邊緣最大夾角φmax。與待定斷股所在直線li的夾角θi做差值運算,取絕對值可得
|Δθ|=φmax-θi
設定經驗閾值threshold=π/36,如果|Δθ|大于指定閾值threshold,則判定該段為輸電線斷股,記錄下該段的起始點位置。如果|Δθ|小于等于指定閾值threshold,則繼續檢測下一個待定斷股邊緣ei+1,直到該直線li上的待定斷股邊緣全部遍歷結束。輸電線是否發生斷股的判定式為

3) 輸電線斷股定位。由上述步驟可知,斷股邊緣ei起點與待定斷股邊緣的白色像素點個數為count,設斷股邊緣像素點到直線li的高為ΔH,遍歷斷股邊緣沿直線的投影為ΔH,其計算式分別為
可計算斷股段距離遍歷直線的最大高度max(ΔW)和最大寬度max(ΔH),原理如圖6所示。
將斷股段起點作為標記起點,由Δθ的正負判斷斷股定位方向,判定函數為
計算定位終點,完成該斷股缺陷位置的定位標記,重復步驟1),直至遍歷完直線集中L的所有直線。
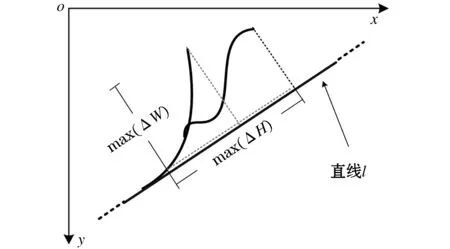
圖6 斷股故障定位原理圖
4 實驗結果
應用上述方法對經過Hough算法提取輸電線直線后的圖像進行輸電線斷股故障檢測,最終檢測結果如圖7所示。

圖7 斷股標記定位結果
5 結 語
提出了基于邊緣跟蹤的輸電線路斷股缺陷檢測與定位方法。首先對巡檢圖像進行預處理,從RGB空間轉換到灰度空間,便于后期處理。然后在標準的Canny算法的基礎上進行了改進,采用雙邊波器替代傳統的高斯濾波器,在去噪的同時保留了更多的細節,獲得了更高的邊緣檢測精度。最后通過設計的輸電線斷股缺陷檢測與定位方法,直觀地得出輸電線斷股點所在位置,以及準確地標記出輸電線斷股。從實驗結果來看,該方法能夠有效地檢測與定位出輸電線路斷股故障,在無人機電力巡檢領域具有一定的工程應用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
