伺服電機三環控制及其模型的建立仿真
2020-11-12 22:40:41盛勇
市場周刊·市場版 2020年4期
關鍵詞:仿真
摘 要:首先,文章將闡述三環控制和PID控制的內容和特點,其次,根據實例總結一些經驗方法,最后,利用Matlab對上述的系統進行建模和仿真,從而更好地了解這個自動控制系統。
關鍵詞:伺服;三環控制;仿真
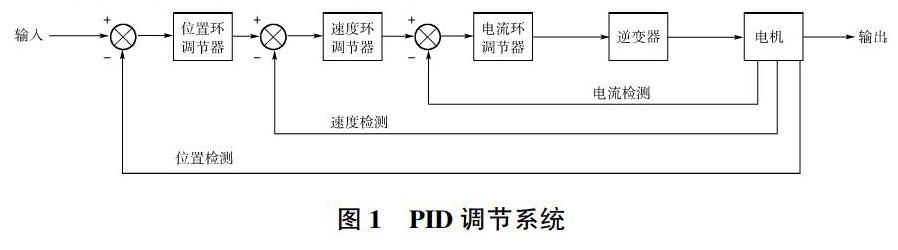
一、 三環控制
伺服一般為三個環控制,所謂三環就是3個閉環負反饋PID調節系統,如圖1所示。
二、 MATLAB仿真
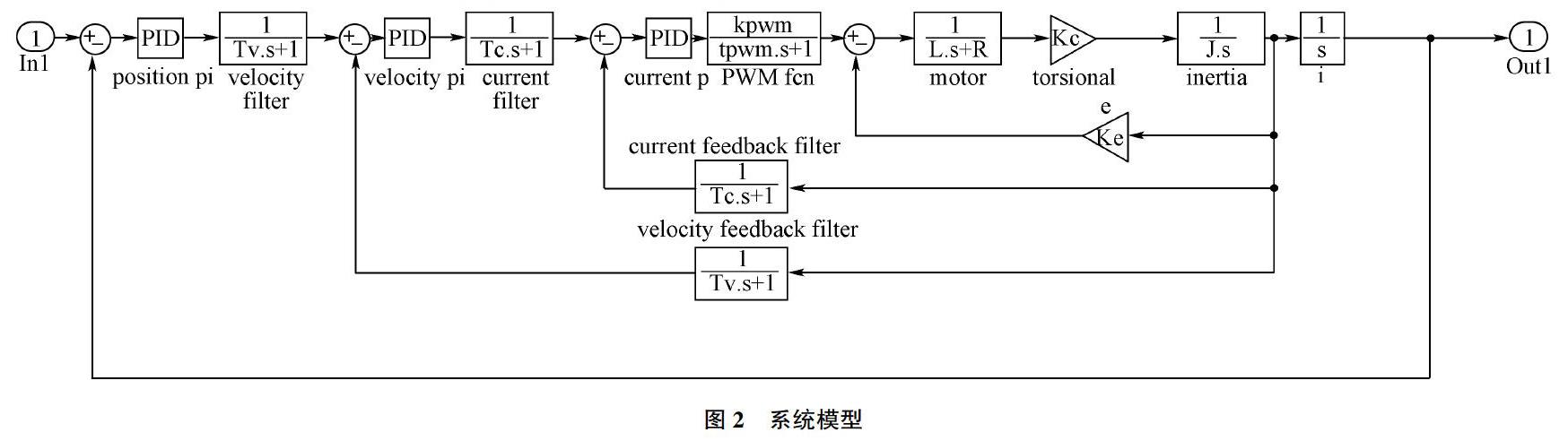
實際工作中,電機優化或調試受到很多外界條件的制約,必須保證生產的進行,并且盲目的調整參數也有很大的風險,甚至損壞機械結構,因此這里嘗試運用MATLAB軟件中的SIMULINK模塊來搭建一個簡單的三環控制系統,并引入響應的調節參數,利用其自帶的仿真功能模擬系統的響應,并且由于傳遞函數的應用,對于參數的設定也能起到一定的指導作用,由于時間比較倉促,本次搭建的系統并未考慮負載,并且只引入了幾個我們常見的參數,主要包括MD1120,MD1121,MD1407,MD1409,MD32200。
具體搭建完的系統模型如圖2所示。
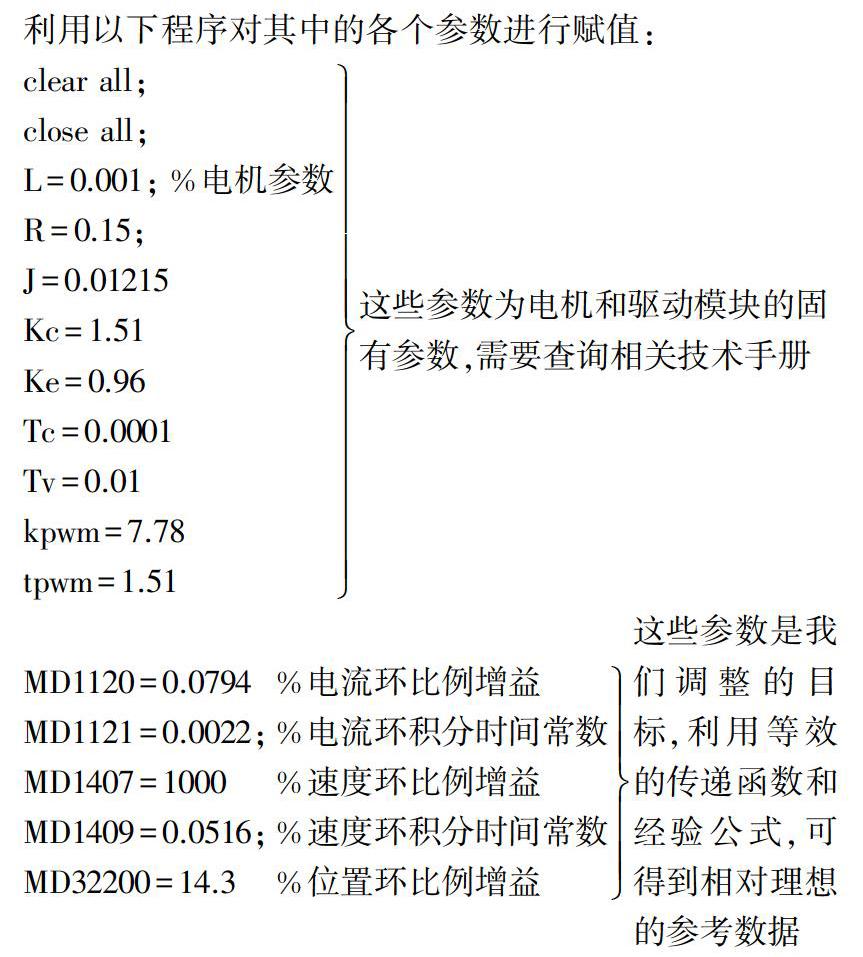
利用以下程序對其中的各個參數進行賦值:
篇幅有限,具體計算的過程在此省略,由于傳遞函數的引入,將大大縮短參數整定的時間。仿真調試過程具體如下。
1. 運行上述賦值程序,則具體參數被輸入到模型中。
2. 運行模型,進行線性分析。
3. 根據頻率響應曲線和單位階躍響應對參數進行微調,直至曲線穩定,響應迅速,超調量控制在可控范圍內。
三、 結語
伺服電機的三環控制是一個完整的自動控制過程,其中牽涉了很多參數,包括需要我們整定的參數和被控對象的特性參數,在平時的工作中我們接觸得更多的只是一些經常需要微調的參數,眾多參數對系統產生的作用我們并不明確,而借助數學模型和MATLAB的仿真,我們可以更好地了解各個參數的作用和相互的影響,對實際工作起到一些指導作用,也幫助我們更加熟悉這個控制系統,但目前這個模型仍不完善,沒有加入負載的干擾和抑制尖峰的帶阻濾波器,這些在之后會慢慢完善。
作者簡介:
盛勇,南京高精齒輪集團有限公司。
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49