基于S型曲線的五次多項式軌跡規劃
2020-11-18 14:37:44楊友良孟文龍
福建質量管理 2020年20期
楊友良 孟文龍
(華北理工大學電氣工程學院 河北 唐山 063210)
為了滿足機械臂末端及關節的運動參數對應于時間的變化關系,保證機械臂完成期望的空間運動提高農業生產力,解決勞動力不足,降低工人勞動強度,提高工人勞動舒適性,降低作業成本,提出了一種基于S型曲線的五次多項式軌跡規劃。在直線插補的基礎上,帶有圓弧過渡的折線插補優化算法,在一定程度上對路徑進行了優化,并提高了機械臂運動的穩定性。對正弦速度曲線、梯形速度曲線和S型速度曲線進行分析,并基于三種速度曲線進行五次多項式軌跡規劃,得出一種效果較好的規劃方法。
引言
隨著科學技術的發展進步,農業也在朝著機械化、信息化、數字化的方向發展。國內外許多學者對摘果機器人進行了研究,包括摘果機器人本身、避障、摘果、識別與定位等[1-3]。采摘機器人在自然環境中工作,比在工業環境中更加復雜。目前,機器人主要基于計算機視覺技術對采摘環境進行重構。軌跡規劃是對機械臂末端及關節的運動參數對應于時間的變化關系,保證機械臂完成期望的空間運動。為了使機械臂工作可靠且穩定,所以要求所用的軌跡關于時間的曲線是平滑且連續的,保證曲線波動不大[4-5]。機械臂的運動軌跡指的是:機械臂末端在自由空間內運動時,所有的位姿總和。而機械臂軌跡規劃則是使機械臂到達目標位姿要求時,對速度和加速度等運動參數的設計。軌跡規劃的目的是保證機械臂快速、準確且穩定完成路徑規劃的任務。軌跡規劃與路徑規劃的區別是:路徑規劃只是對末端路徑進行空間搜索,與時間無關;而軌跡規劃則是對機械臂末端及關節的運動參數對應于時間的變化關系,保證機械臂完成期望的空間運動。為了使機械臂工作可靠且穩定,所以要求所用的軌跡關于時間的曲線是平滑且連續的,保證曲線波動不大。
一、軌跡規劃
(一)笛卡爾坐標系下軌跡規劃
笛卡爾坐標系(也稱為直角坐標系)下的軌跡規劃指的是末端執行器依據任務要求到達目標位置(相對于基坐標系的位置)。當任務要求末端執行器沿著直線或者是曲線運動時,將位姿描述時的直角坐標用時間函數表示。但考慮到機械臂的實際情況,電機都會安裝在關節處,所以需要將規劃目標有末端轉換到關節位置,即將末端執行器的坐標變量通過運動學反解,轉換到關節變量中去,如圖1。

圖1 規劃流程


(二)關節空間下軌跡規劃
在進行軌跡規劃的過程中,將關節參數以時間函數表示。在笛卡爾坐標系下進行軌跡規劃時需要對大量的插補點進行運動學反解,運算量巨大,效率低。且在您笛卡爾坐標系下的軌跡規劃會出現奇異問題,造成速度失控等問題。在進行關節空間軌跡規劃時,必須要注意的是要保證運動的平穩性和連續性,進而提高機械臂的使用壽命和效率,如圖2。
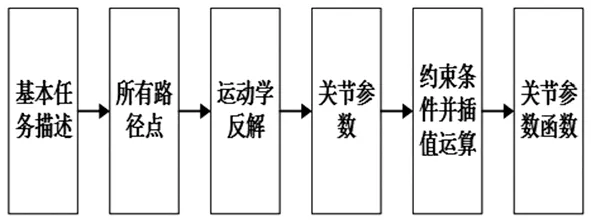
圖2 關節空間軌跡規劃流程圖

二、S型曲線軌跡規劃
考慮本文所用的路徑搜索算法生成的路徑在自由空間內有許多中間節點,采用笛卡爾坐標系的軌跡規劃,雖然能滿足通過中間點,但運動反解產生大量的計算,影響工作效率。所以,提出了一種分步式的關節空間軌跡規劃算法,即先選用合適的速度曲線對中間節點進行速度的規劃,再利用所得中間點的速度,進行關節空間的軌跡規劃。兩種軌跡規劃算法在位移和速度的曲線是平滑且穩定的,但五次多項式軌跡規劃加速度的曲線是平滑的,保障的機械臂運動的速度不會發生突變,提高電機的使用壽命。選用的軌跡規劃算法以五次多項式為基礎,進行分步規劃。首先,分別以正弦速度曲線、梯形速度曲線和S型速度曲線對路徑中間節點進行速度規劃,得到中間節點的速度;然后利用五次多項式的計算方法進行軌跡規劃仿真驗證,從而得出最佳的組合方式,(1)基于梯形曲線的五次多項式軌跡規劃梯形曲線表達式的計算:已知總的運動時間為T,對加速度a、加速時間t1、勻速時間t2和減速時間的計算:
(1)
t2=T-t1-t3
(2)
(3)
(4)
(2)基于正弦曲線的五次多項式軌跡規劃正弦曲線表達式的計算:已知總的運動時間為T,則:
(5)
(6)
(7)
仿真結果如圖3所示。

圖3 基于正弦曲線的五次多項式軌跡規劃
(3)基于S型曲線的五次多項式軌跡規劃S型曲線表達式的計算:已知總的運動時間為T,取七段曲線的時間相同為t,仿真結果如圖4所示。

圖4 基于S型曲線的五次多項式軌跡規劃
三種軌跡規劃的結果在角位移方面差別不大,但基于S型速度曲線在速度和加速度的穩定性較好,波動較小,而且角加速度相對較小,有利于機械臂的平穩運行。
三、結論
軌跡規劃是保證機械臂能夠平穩運行的基礎。對笛卡爾坐標系下軌跡規劃的兩種方法進行分析。首先,在笛卡爾坐標系下軌跡規劃方面,分別對直線插補和圓弧插補進行介紹。考慮到上一章搜索結果為折線,在直線插補的基礎上,提出一種帶有圓弧過渡的折線插補優化算法,在一定程度上對路徑進行了優化,并提高了機械臂運動的穩定性。但在笛卡爾坐標系下進行規劃需要進行大量的反解運算,數據處理量大。然后,對關節坐標系下的兩種方法進行了分析,并基于速度穩定性的考慮,采用了五次多項式的方法。對正弦速度曲線、梯形速度曲線和S型速度曲線進行分析,并基于三種速度曲線進行五次多項式軌跡規劃,得出一種效果較好的規劃方法——基于S型曲線的五次多項式軌跡規劃。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
公民與法治(2020年11期)2020-07-25 02:02:06
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
領導決策信息(2018年50期)2018-02-22 06:17:16
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
科技知識動漫(2016年8期)2016-07-29 20:40:09