解析視覺控制系統(tǒng)與ABB機器人之間的通訊
2020-11-20 02:07:27郝磊
裝備維修技術(shù) 2020年7期
關(guān)鍵詞:自動化
郝磊
摘要:研究了一種基于SDK網(wǎng)絡(luò)通訊機制的ABB機器人與視覺系統(tǒng)之間的通訊編程方法,實現(xiàn)了機器人基于C/S模型的分布式網(wǎng)絡(luò)控制系統(tǒng)模型,為機器人柔性自動化系統(tǒng)的開發(fā)驗證了一種可行的方法。
關(guān)鍵詞:自動化 視覺控制系統(tǒng) 工業(yè)機器人 通訊協(xié)議
我公司承接的北汽薩博沖壓分廠FAGOR自動線國內(nèi)安調(diào)項目,為原澳洲三菱阿德萊德(Adelaide)工廠二手設(shè)備,該線由西班牙FAGOR聯(lián)合瑞典ABB兩家公司設(shè)計、成套。全線由兩臺2400噸和兩臺800噸閉式4點大臺面機械壓力機和自動化上下料、傳遞裝置(8臺ABB機器人)、快速換模臺車及隔聲房組成,總長72米。其中第二臺機器人的卸載運動由獨立于整線自動化控制系統(tǒng)的視覺系統(tǒng)控制。
該系統(tǒng)采用機器視覺技術(shù)和運動控制技術(shù)相結(jié)合,視覺系統(tǒng)計算板料的位置差異參考坐標(biāo),發(fā)送給ABB機器人,修正機器人以正確的姿態(tài)從傳送帶卸載板料,然后裝載到第一臺壓機。
但視覺系統(tǒng)與ABB機器人之間的通訊問題成為整線自動化調(diào)試的技術(shù)難點,經(jīng)過查閱大量資料及咨詢國內(nèi)外相關(guān)專業(yè)廠家,終于解決了此難點。下面具體介紹一下視覺系統(tǒng)與ABB機器人的通訊。
ABB機器人控制器通過Ethernet卡與外部視覺計算機相連,實現(xiàn)基于TCP/IP協(xié)議的以機器人控制器為服務(wù)器,視覺計算機為客戶機之間的通訊。機器人控制器作為服務(wù)器,提供數(shù)據(jù)管理服務(wù)和應(yīng)用服務(wù),響應(yīng)并受理由外部計算機發(fā)出的請求,并將計算結(jié)果傳送給外部視覺計算機。
ABB S4型機器人控制系統(tǒng)的軟件結(jié)構(gòu)由機器人多任務(wù)操作系統(tǒng)BaseWare OS和基于該操作系統(tǒng)的機器人RAPID程序及SDK服務(wù)器程序等組成。由于機器人的運動和操作只受機器人程序控制,要實現(xiàn)機器人在線控制,必須與機器人RAPID程序進行實時數(shù)據(jù)通訊,而SDK服務(wù)器程序可以跨越進程與操作系統(tǒng)或機器人程序進行數(shù)據(jù)通訊,從而獲得機器人系統(tǒng)和機器人RAPID程序的狀態(tài)和數(shù)據(jù)變量。外部視覺計算機運行SDK客戶端程序,通過向機器人控制器發(fā)出請求,并實時響應(yīng)機器人控制器上的SDK服務(wù)器程序的答復(fù)的方法進行數(shù)據(jù)通訊。
一、通訊配置
1.ABB機器人的配置:
在開始配置之前,必須在示教器上檢查機器人FactoryWare的安裝情況。按服務(wù)按鈕→選擇服務(wù)菜單→在視圖菜單下→選擇系統(tǒng)信息的ProductID,在那里,它應(yīng)安裝FatoryWare(以太網(wǎng)模塊)。
下一步是配置FactoryWare。按服務(wù)按鈕→選擇系統(tǒng)參數(shù)→在主題菜單下→選擇通訊類型→進入應(yīng)用協(xié)議→按添加按鈕添加以下參數(shù):
名稱:介紹這個配置的名字。 i.e:RAP1
傳輸協(xié)議:傳輸協(xié)議是TCP / IP(必須定義)
類型:該參數(shù)必須選擇讀寫
遠程方向:IP Webware的安裝。
上述參數(shù)的定義和機器人重新啟動后,機器人示教器上方能顯示這個參數(shù)。之后,在這里輸入視覺PC的IP地址。
重要的事情是聲明所有的變量,我們希望機器人和Webware之間的溝通做到持久性。必須在機器人示教器上執(zhí)行以下步驟:
按程序按鈕→在查看菜單下→進入數(shù)據(jù)類型→選擇要聲明的數(shù)據(jù)類型→按新增按鈕→介紹名稱,然后聲明所有的變量后,用戶可以從任何遠程應(yīng)用程序,使用簡單的視覺機器人驅(qū)動機器人的程序訪問這些變量執(zhí)行。
2.視覺系統(tǒng)Webware的配置
要配置Webware的用戶必須使用以太網(wǎng)。具體操作如下:
1)Start→Programs→ABB Automation→WebWare SDK→InterLink Configuration
2)首先,用戶必須添加一個新的機器人配置文件,按 圖標(biāo)。然后,下面的屏幕上會出現(xiàn):
3)這里,必須在第一個框中(L2A; ROBSLAVE)鍵入機器人的名稱。之后,選擇機器人的TCP/ IP協(xié)議,按“編輯主機文件”按鈕,然后會彈出這個窗口:
TCP / IP節(jié)點必須加入。按“添加”按鈕,將打開配置窗口:
4)在此窗口中,必須引進的主機名(R2)和機器人的IP地址。按“OK”,保存。
設(shè)置機器人2的IP地址(視覺機器人)。
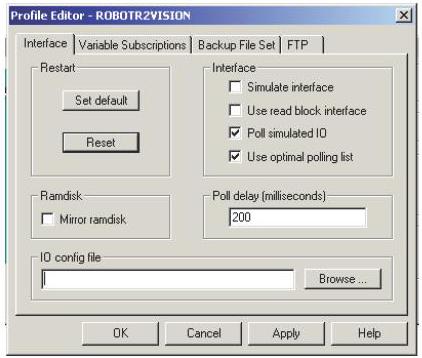
5)最后,必須聲明一個名字,按“編輯個人資料”按鈕,然后到“接口”標(biāo)簽:
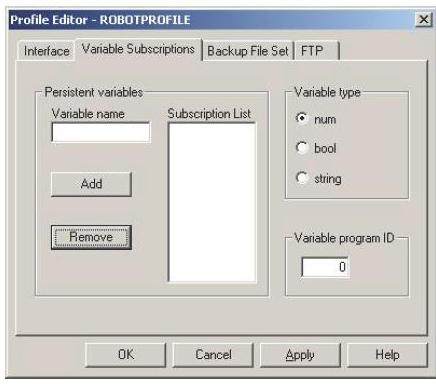
6)在窗口必須選擇“Poll simulated IO”和“Use optimal polling list”。最后介紹機器人的IO文件的路徑。下一步就是訂閱所有的快速程序使用溝通與視覺系統(tǒng)的持久變量。做這個必須去'變量訂閱'選項卡:
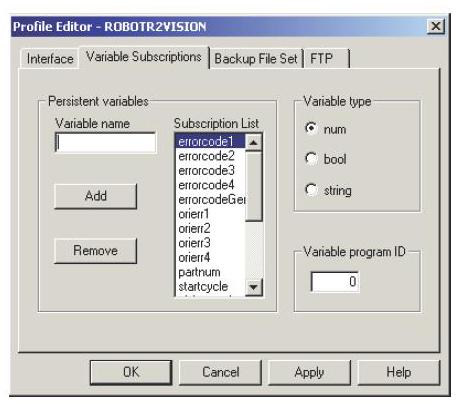
7)在此窗口中,必須引入變量名,選擇變量的類型,按添加按鈕。逐個新增視覺系統(tǒng)所使用的所有變量:
數(shù)字變量:errorcode1,errorcode2,errorcode3,errorcode4,errorcodeGen,orierr1,orierr2,orierr3,orierr4,xerr1,xerr2,xerr3,xerr4,yerr1,yerr2,yerr3,yerr4,partnum。
布爾變量:startcycle,visionready。
配置完成后,主窗口必須顯示此參數(shù);
8)視覺PC Robot2的IP地址
視覺PC的IP地址是與機器人必須兼容。
9)運行視覺軟件
進入開始菜單 - 程序 - ABB自動化 - Webware的SDK和運行互聯(lián)監(jiān)視器驗證機器人和視覺電腦之間的通訊。
二、通信協(xié)議。
視覺系統(tǒng)與機器人使用以太網(wǎng)的通信是基于一系列的可讀取和寫入雙方的共同變量。在機器人這邊,這些常見的變量必須是恒定的。除此之外,機器人必須在自動模式下讀取和寫入雙方的共同變量。如果事實并非如此,視覺系統(tǒng)將無法讀寫任何變量。
雙方所使用的變量的名稱必須在邏輯上是平等的,以及它們的類型。
下面是每個變量的解釋:
startcycle:
這個變量進行數(shù)據(jù)收集的啟動。機器人將此變量設(shè)置為TRUE時視覺系統(tǒng)已確認(rèn)的變量已經(jīng)改變,它將閱讀圖像。視覺系統(tǒng)變量設(shè)置為FALSE,使機器人可以識別,如果必要的話,視覺系統(tǒng)必須確認(rèn)登記。
visionready:
視覺系統(tǒng)將此變量設(shè)置為TRUE,表明機器人在最后一次讀取相應(yīng)變量模型的數(shù)據(jù)是已經(jīng)準(zhǔn)備好的。機器人將這個變量設(shè)置為FALSE,將讀取模板的數(shù)據(jù)。
partnum:
機器人設(shè)置此變量,每次都需要從模型中收集數(shù)據(jù)。其中startcycle變量設(shè)置為TRUE的時,代表視覺系統(tǒng)要讀取工件代碼,然后視覺系統(tǒng)在其數(shù)據(jù)庫發(fā)現(xiàn)此模板的型號并在軌道上發(fā)現(xiàn)的型號,
errorcodeGen:
這是由視覺系統(tǒng),并表示可能發(fā)生一般性錯誤。機器人必須讀這個變量,并檢查錯誤板塊讀取數(shù)據(jù)之前發(fā)生的。如果發(fā)生錯誤,發(fā)現(xiàn)板塊的變量的數(shù)據(jù)是不可預(yù)知的。
錯誤代碼:
0沒有一般的錯誤。
-1參考在“partnum”的要求是無效的。
-2這個模型文件沒有找到。
errorcode1
在第一個工件可能出現(xiàn)的錯誤。
錯誤代碼:
-0未找到正確的模板。
-1傳送帶上工件沒有找到,沒有有效的數(shù)據(jù)。
-2工件已超出傳送帶的邊緣。
xerr1:
這是視覺系統(tǒng)指示機器人在傳送帶上發(fā)現(xiàn)工件位置的變量之一。這個變量通知機器人在傳送帶上工件沿X軸的位置變化。在本環(huán)節(jié)中工件是唯一的,相應(yīng)的變量將顯示,由于其余的都是相同的。
yerr1:
這個變量通知機器人在傳送帶上工件沿Y軸的位置變化。
orierr1:
這個變量通知機器人在傳送帶上工件角度的位置變化。
通信協(xié)議
*視覺系統(tǒng)讀取機器人發(fā)來的“partnum”數(shù)字量。
*機器人設(shè)置“startcycle”變量為TRUE,以便視覺系統(tǒng)開始工作。
*視覺系統(tǒng)讀取“startcycle”,把它設(shè)置為FALSE,并同時讀取數(shù)據(jù)庫的模板。
*視覺系統(tǒng)設(shè)置一般錯誤。
*視覺系統(tǒng)計算實際工件和模型的坐標(biāo)偏差。
*視覺系統(tǒng)設(shè)置“visionready”變量為TRUE。
*機器人讀取“visionready”并將其設(shè)置為FALSE。
*機器人讀取視覺系統(tǒng)發(fā)來的坐標(biāo)偏差(X、Y、角度)。
結(jié)論:視覺導(dǎo)引運動控制系統(tǒng)適和多種應(yīng)用,從大量元件的自動分析到簡單的撿取和放置應(yīng)用。設(shè)計這種系統(tǒng)雖然很復(fù)雜,但它能最大限度地提高生產(chǎn)效率。通訊只是建立整個系統(tǒng)比較初級的部分但它非常重要,如果視覺系統(tǒng)與工業(yè)機器人之間的通訊無法建立,將導(dǎo)致視覺導(dǎo)引運動系統(tǒng)無法實現(xiàn)。視覺引導(dǎo)機器人技術(shù)具有良好的成本節(jié)約優(yōu)勢,能對零件式樣與位置的變化進行管理,免去了成本高昂的精密夾具、機械料擋和料盤,實現(xiàn)了人工作業(yè)的自動化;能精確定位料架上的零件,延長生產(chǎn)線正常運行時間,消除機器人碰撞的機會;并通過基本檢驗和零件識別功能提升產(chǎn)品質(zhì)量。該項技術(shù)已經(jīng)被廣泛地應(yīng)用于各類搬運、組裝、機械加工和壓鑄工藝中。
猜你喜歡
經(jīng)營者(2016年12期)2016-10-21 07:39:01
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學(xué)與財富(2016年28期)2016-10-14 21:28:54
科學(xué)與財富(2016年28期)2016-10-14 19:52:27
科學(xué)與財富(2016年28期)2016-10-14 19:49:55
科學(xué)與財富(2016年28期)2016-10-14 19:33:38
科學(xué)與財富(2016年28期)2016-10-14 03:14:22
