基于STM32的微電腦鼠對角線沖刺設計與實現
2020-11-23 07:32:54李紅益張好明王應海
機電信息 2020年29期
李紅益 張好明 王應海


摘要:為了提高微電腦鼠沖刺的穩定性,并減少微電腦鼠在復雜迷宮中的沖刺時間,提出了基于STM32的新型對角線沖刺算法。借助加速度傳感器ADXL202實現對微電腦鼠轉彎誤差補償和直線位置的精確修正,前墻傳感器和加速度傳感器組合應用保證了微電腦鼠對角線沖刺姿態的準確性。微電腦鼠高速沖刺實驗表明,新型對角線沖刺算法能顯著提高微電腦鼠的穩定性,并縮短微電腦鼠在迷宮中的沖刺時間。
關鍵詞:微電腦鼠;對角線沖刺;伺服;加速度傳感器
0 引言
微電腦鼠(micromouse)是一種智能輪式迷宮搜尋機器人,它依靠微處理器、傳感器和機械運動部件實現在迷宮中的探測和沖刺。微電腦鼠依靠自身攜帶的傳感器感知不同的“迷宮”,并自動記憶其搜尋路徑,依靠多種人工智能算法選擇最佳沖刺路徑,在最短的時間內到達設定的不同迷宮目的地[1-3]。
通常用運行時間、迷宮時間和觸摸次數這3個參數來衡量一只微電腦鼠的運動控制能力,因為這3個參數決定了一只微電腦鼠求解迷宮的可靠性、效率和速度,不同國家采用不同的標準[4-7],這3個參數中最重要的參數就是迷宮時間,而迷宮時間又主要取決于其沖刺的時間長短。微電腦鼠高速沖刺運動控制系統要求較高,由于國內研究時間較短,開發的微電腦鼠運動控制技術相對比較落后,實際運動過程中存在諸多問題,例如,只有5組傳感器用來判斷高速沖刺路徑中迷宮墻壁的存在,往往提供錯誤的迷宮信息,導致沖刺失敗;只有1組傳感器檢測沖刺路徑中前方迷宮的擋墻,易受外界干擾,造成高速沖刺時的導引信息錯誤;步進電機的使用,導致運動控制系統經常丟失驅動信號,出現沖刺路徑更新錯誤的情況;由于采用相對低級的人工智能算法,使得沖刺路徑不是最佳,無法取得最短沖刺時間。因此,需要對現有的微電腦鼠重新進行設計。
1 基于STM32F405的高速微電腦鼠硬件原理
STM32F405是由STM公司生產的微控制器,它是基于ARM Cortex-M4內核的32位flash微控制器。STM32F4系列除引腳和軟件兼容高性能的F2系列外,F4系列的主頻高達168 MHz,遠遠高于F2系列的120 MHz,并且STM32F4系列支持單周期DSP指令和浮點單元,STM32F405集成了定時器、3個ADC、2個DAC、串行接口、外存接口、實時時鐘等先進外設,使得F4系列可以較容易滿足控制和信號處理功能混合的數字信號控制需求,為多軸伺服電機控制提供靈活的解決方案。這些特點使得STM32F405特別適合用于多軸微電腦鼠高速沖刺運動控制系統的信號處理。
為了進一步提高微電腦鼠高速沖刺運動控制系統的可靠性,本文設計的高速微電腦鼠樣機采用紅外發射管OPE5594A和紅外接收管TSL262來探測迷宮擋墻的存在,極大地提高了迷宮探測的精度和準確度。
為了充分發揮前方傳感器的導航和導引功能,本文設計的微電腦鼠高速沖刺樣機舍棄了國內常采用的單傳感器檢測方法,所設計的微電腦鼠傳感器二維排列結構如圖1所示,采用基于OPE5594A和TSL262的紅外傳感器S1組和S6組共同探測前方障礙物,有利于微電腦鼠高速沖刺時的導航和導引。
L298N是SGS公司生產的小型伺服驅動器,包含4路邏輯驅動電路,芯片的輸出電壓高達50 V,輸出電流高達2.5 A,可獨立方便地驅動2臺伺服電機。芯片含有2路使能控制端子,可以很好地滿足微電腦鼠高速沖刺兩軸伺服系統的單獨控制需求。
在吸收國外微電腦鼠先進設計思想的基礎上,本文在STM32F405的微電腦鼠運動控制器基礎上引入伺服驅動器L298N,控制器以STM32F405為處理核心,實現微電腦鼠快速沖刺時兩軸伺服電機同步信號的實時處理,本文設計的控制器原理框圖如圖2所示。
STM32F405與L298N連接示意框圖如圖3所示,S1~S6是基于OPE5594A和TSL262的紅外發射和接收對管傳感器,S7是加速度傳感器ADXL202,可以計算出微電腦鼠高速轉彎時的旋轉角度,有利于微電腦鼠高速沖刺時方向的精確控制。
2 高速微電腦鼠沖刺原理
微電腦鼠一旦接到沖刺命令,前方傳感器S1和S6首先對沖刺路徑中的前部環境進行判斷,防止誤沖刺。如果S1和S6發現運動路徑中存在迷宮擋墻,則向STM32F405發送沖刺路徑錯誤中斷請求,STM32F405首先響應中斷,然后禁用L298N的2路使能端,封鎖伺服X電機和伺服Y電機的PWM驅動信號,微電腦鼠進入自鎖階段;如果沒有迷宮擋墻進入前方的沖刺路徑,微電腦鼠將以設定的速度和加速度完成最佳路徑的沖刺。
2.1? ? 沖刺原理
在沖刺階段,微電腦鼠將按照圖4所示的速度-時間圖形所示規律進行加減速,圖中包含的面積是微電腦鼠在某段運動路徑上需要運行的沖刺距離。
2.2? ? 對角線沖刺原理
在微電腦鼠沿著其沖刺路徑快速行進過程中,如果某段路徑如圖5所示,則微電腦鼠控制器將存儲其當前坐標(x,y),并在控制器的命令下開始復雜的轉彎沖刺。
傳統的微電腦鼠沖刺軌跡如圖6所示。從圖中可以看出,這條運動軌跡相對于直線運動來說距離更長,而且在這條軌跡上沖刺需要多次啟停,多次的加減速相對于直線運動來說一般需要更長的運動時間。
為了縮短沖刺路徑并減少沖刺時間,本文提出了一種新型對角線沖刺算法,微電腦鼠按照圖7所示的運動軌跡運行:直線調整姿態,以45°沖刺轉入,對角線沖刺,以45°沖刺轉出。
根據不同的沖刺指令算法,STM32F405首先將對角線沖刺不同階段的行駛距離轉換為沖刺加速度、速度和位置指令,然后根據其內部的三閉環伺服程序,將控制器與電機反饋相結合,產生PWM驅動信號,然后用STM32F405調節L298N的內部邏輯電路輸出,使微電腦鼠沿著規定軌跡行駛。在整個運動過程中,多軸加速度傳感器ADXL202將記錄微電腦鼠各軸加速度,通過積分得到角度信號,當角度偏差超過設定閾值時,控制器就在下一個采樣周期進行補償,使微電腦鼠完全按照規定的角度轉入和轉出。
2.3? ? 對角線沖刺補償
當微電腦鼠執行對角線沖刺時,機器人沒有任何平行的擋墻來執行正常的直線路徑導航,因此必須借助自身傳感器來實現自主導航,以幫助機器人遭遇干擾時避免與擋墻發生碰撞。由于微電腦鼠在對角線直線路徑上行走時,沒有任何擋墻與機器人平行,此時前端傳感器S1和S6對系統非常重要,機器人仍然可以使用這2個前端傳感器來確定是否朝著正確的方向前進,如圖8所示,當方向正確時,2個前傳感器將不會感應到任何物體,這意味著2個傳感器的讀數應保持在一個較低的數值。如圖9所示,當其中一個反饋值大于定義的閾值時,這意味著機器人正朝錯誤的方向前進,如果繼續朝這個方向快速行進,微電腦鼠就會與墻壁發生碰撞。
3 軟件設計
對于本文設計的基于STM32F405的高速微電腦鼠,在沖刺之前,它通常被放置在迷宮起點,高速沖刺控制器使其首先進入自鎖狀態,一旦有外界命令觸發控制器,微電腦鼠將根據實際的導航環境沿著沖刺路徑快速前進,由STM32F405產生2臺直流伺服電機的PWM驅動信號,實現微電腦鼠在復雜迷宮中的快速沖刺。本文設計的沖刺程序原理如圖10所示。
對角線沖刺原理如圖11所示。
4 實驗
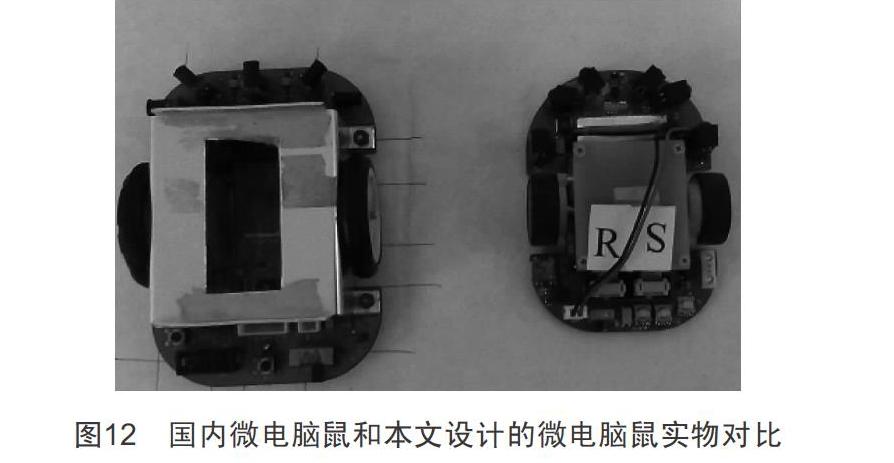
圖12為國產微電腦鼠和本文設計的基于STM32F405設計的微電腦鼠實物對比。通過對比可以看出,新設計的微電腦鼠具有體積小、重心低的特點,可以提高微電腦鼠在高速沖刺時的動態性能。
圖13為本文設計的微電腦鼠即將進入高速對角線沖刺時的畫面。從圖中可以看出,微電腦鼠行走的方向平行于兩邊的擋墻,并處于當前迷宮格的中線上,為對角線沖撞奠定了堅實的基礎。
從圖14微電腦鼠在迷宮沖刺中運行的圖片可以看出,該微電腦鼠沿著預設的對角線方向運行,這說明控制器已經按照紅外傳感器S1、S6和加速度傳感器ADXL202的反饋進行了精確補償。
5 結語
(1)L298N集成驅動器的使用,使得新型微電腦鼠具有更小的尺寸和質量,并降低了其重心,有利于微電腦鼠的高速沖刺。
(2)加速度傳感器ADXL202的應用,使得沖刺控制器可精確控制微電腦鼠的運動方向,易于微電腦鼠實現高速旋轉沖刺。
(3)多傳感器組合可以實時對運行在最短路徑下的微電腦鼠進行干擾補償,在確保微電腦鼠高速沖刺時的準確性和穩定性的前提下,可進一步減少其迷宮沖刺時間。
[參考文獻]
[1] CHEN N.A vision-guided autonomous vehicle an alternative micro mouse competition[J].IEEE Transactions on Education,1997,40(4):253-258.
[2] TETTA CM.The evolution of the Micromouse Competition[J].IEEE Potentials,1986,6(4):32-37.
[5] YANG X.Research and Realization on Micrornouse for Maze Searching in Coalmine[J].Coal Technology,2010(6):60-69.
[4] JIN Y Y,LIU K H,REN Y H. Wheeled MazeRobot Design Based on Ranging Infrared Sensor[J].Mierocontrollers and Embedded Systems,2013(9):1-5.
[5] 張月芹,尹涓,鞠歡.基于STM32的迷宮機器人控制系統設計與實現[J].機電工程技術,2016,45(12):1-6.
[6] 詹杰,劉學兵,張浩.基于直流電機驅動的電腦鼠設計[J].吉首大學學報(自然科學版),2015(3):39-44.
[7] 賀少波,孫克輝.基于向心法則的電腦鼠走迷宮算法設計與優化[J].計算機系統應用,2012(9):80-83.
