基于相繞組電流波形的開關磁阻電機損耗研究
2020-11-24 07:45:52曲兵妮宋建成田德翔宋世潮
微特電機 2020年11期
趙 勇,曲兵妮,宋建成,田德翔,宋世潮
(1.太原理工大學 礦用智能電器技術國家地方聯合工程實驗室,太原 030024;2.太原理工大學 電氣與動力工程學院,太原 030024)
0 引 言
開關磁阻電機(以下簡稱SRM)具有較寬的調速范圍,電機可長時間低速運行。不同的運行工況與控制策略條件下,由于SRM電流波形的變化與磁路的非線性,相繞組電流波形與鐵心內的磁密波形會有很大不同,電機的損耗也會有很大的不同。SRM的運行工況與控制策略是影響電機損耗的重要因素。因此,有必要探索一種充分考慮電機運行工況與控制策略的損耗計算方法。
目前,學者們針對SRM本體、控制器以及SRM的損耗問題做了很多仿真研究工作。文獻[1]用Ansoft軟件搭建了電機本體的有限元模型與外電路模型,得出了電機運行時的磁鏈、電流、轉矩等特性曲線。文獻[2-3]用非線性磁參數的方法搭建了SRM本體的Simulink模型,并通過實驗驗證了該方法的準確性。文獻[4-7]在SRM本體模型的基礎上,搭建了SRM控制器的Simulink仿真模型。文獻[8]討論了SRM電機銅耗、鐵耗、機械損耗和雜散損耗的計算方法,并通過實驗驗證了計算方法的有效性。文獻[9-11] 基于SRM各部分的磁場分布與磁通波形研究了電機鐵損的計算方法,給出了計算公式,并通過有限元仿真與實驗驗證了計算方法的有效性。文獻[12-14]基于有限元法計算得到SRM的磁密波形,分別用諧波法、雙頻法、橢圓法計算了SRM的鐵損。文獻[15]分別采用了時步有限元法與基于有限元法的諧波法計算了SRM的鐵損,發現時步有限元法比諧波法更加經濟合理。文獻[16-18]考慮了SRM鐵心內磁通波形的直流偏置和小磁滯回環對電機鐵損的影響,提高了SRM鐵耗計算的準確性。
上述文獻給出了SRM本體及驅動器的Simulink仿真準確建模方法,給出了SRM鐵損計算的常用方法。常用的若干種鐵損計算方法中,時步有限元法是比較準確快捷的方法,考慮磁通波形的直流偏置和小磁滯回環可以進一步提高SRM鐵損計算的準確性。僅使用有限元軟件無法模擬實際工況下電機的復雜控制過程,相電流波形的仿真結果與實際工況存在較大差異,損耗計算結果不夠準確。
本文以一臺7.5 kW的SRM為研究對象,采用非線性磁參數建模的方法對SRM本體建模[2],搭建了Simulink仿真模型,所采用的控制算法和實驗平臺控制算法一致,仿真模型計算的SRM相繞組電流波形與實驗測量波形高度吻合,利用仿真模型可以快速準確地計算出不同轉速和負載條件下的電流波形,并基于電流波形計算出銅損和鐵損。由于電機鐵損有限元計算所使用的電流波形來自于與實驗平臺控制算法相同的Simulink仿真模型,故損耗計算結果更加接近實際工況。最后,對典型工況損耗進行計算,得出了電機損耗隨電機轉速變化的規律。
1 SRM相電流波形對電機損耗的影響
SRM的損耗主要有銅損、鐵損、機械損耗、雜散損耗。本文主要研究SRM損耗中占比較大的銅損與鐵損。
SRM的銅損計算公式如下:
(1)
式中:m為電機相數;T為電流波形重復周期;R為相繞組電阻;i(t)為電流波形;pCu為電機銅損。
從式(1)可以看出,SRM相繞組電流的大小和波形決定了電機銅損的大小。SRM鐵心的勵磁磁場由相繞組電流建立,鐵心中的磁場分布、磁密波形以及鐵損與相電流波形高度相關。故將與實驗平臺一致的相電流波形作為損耗計算的依據可以有效地提高SRM損耗計算的準確性。
SRM具有很寬的調速范圍與靈活的控制策略,在不同的運行工況與控制策略條件下,相繞組電流波形會有很大的變化。目前,常用的有限元計算軟件在軟件內部無法模擬SRM控制系統實驗平臺的復雜控制算法。在SRM損耗計算中,通常依靠設置功率器件開關動作來模擬功率開關的通斷和繞組電流斬波,與實際SRM驅動系統的控制方法相差較大,相應的電流波形也與實際SRM驅動系統相差較大,僅基于有限元軟件計算的電流波形無法實現SRM損耗的準確計算。
為了得到準確的相電流波形,提高電機損耗計算的準確性,本文采用有限元法準確計算SRM樣機的靜態電磁特性,根據靜態電磁特性在Simulink中對SRM電機本體準確建模,并在Simulink仿真模型的控制器中復現了實驗平臺的控制算法,得到更加準確的相電流波形,并以此電流波形作為損耗計算的依據,提高了損耗計算的準確性,充分考慮了電機的運行工況與控制策略對電機損耗的影響。
2 SRM驅動系統建模
2.1 SRM靜態特性有限元計算
本文用JMAG軟件對SRM樣機進行電磁有限元分析,圖1為樣機的二維有限元模型。將轉子槽中線對準定子齒中線位置定義為轉子位置角θ為0。在靜態特性仿真計算中,計算電機半個轉子極距角即0~22.5°范圍內,相繞組電流在0~30 A范圍內的磁鏈特性,其中磁鏈特性Ψ(i,θ)曲面與矩角特性T(i,θ)曲面分別如圖2和圖3所示。考慮到各相繞組具有對稱性,僅對一相繞組進行計算,仿真計算過程中忽略電機相繞組的相間互感。
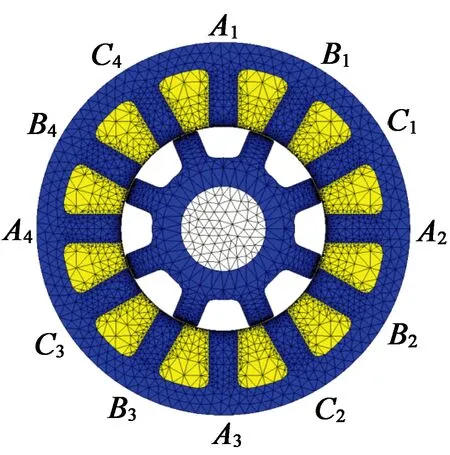
圖1 二維有限元模型
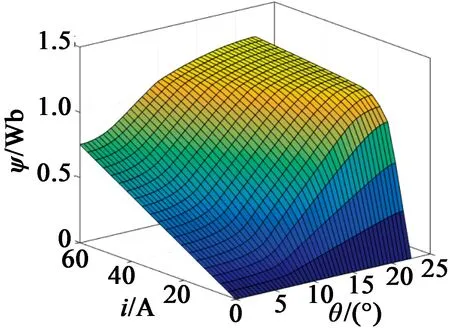
圖2 SRM磁鏈特性
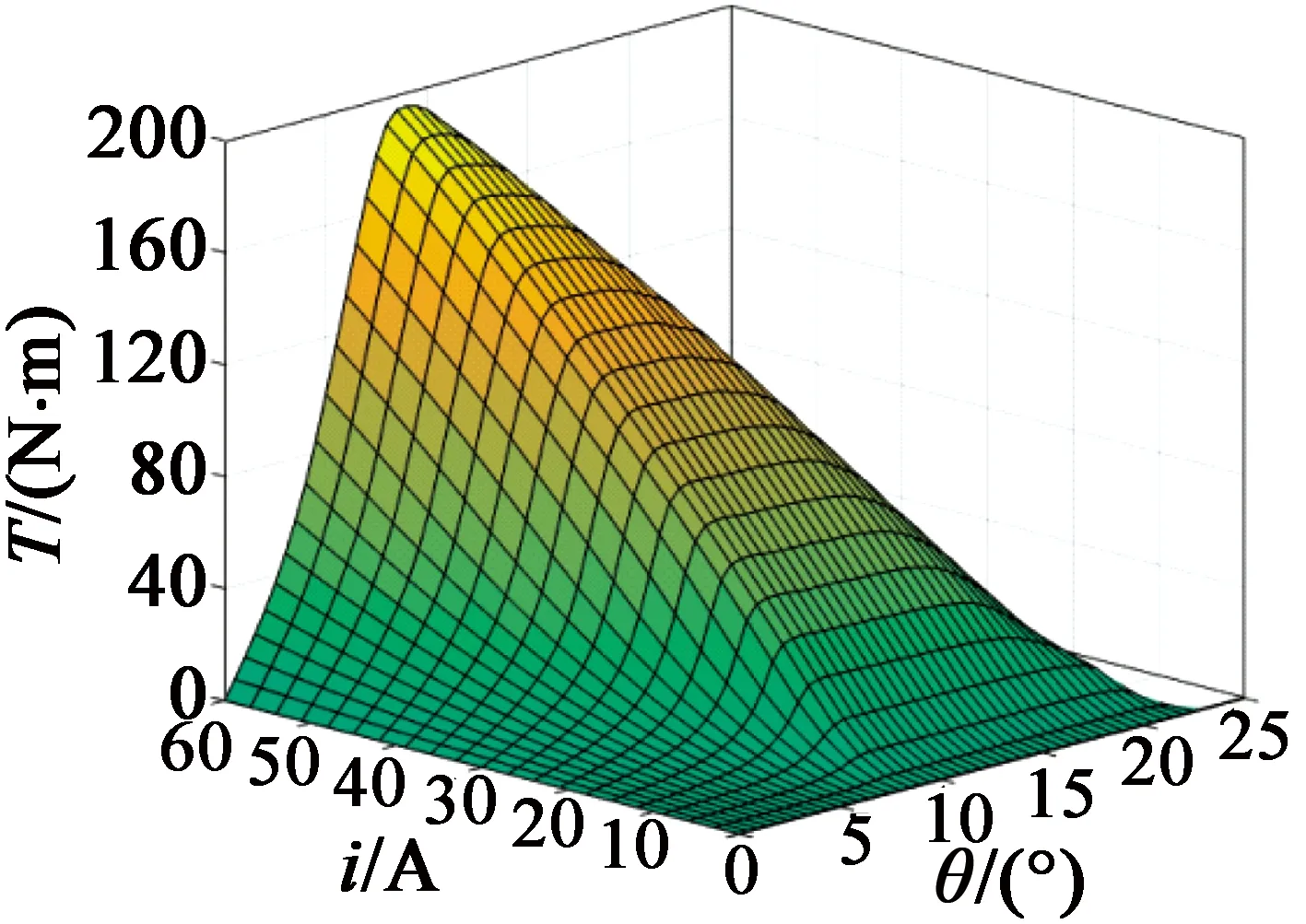
圖3 SRM矩角特性
2.2 SRM本體建模
本文利用電磁有限元計算得到的電機磁鏈特性與矩角特性數據,在Simulink中對SRM本體建模,仿真模型框圖如圖4所示。其中,電流特性i(Ψ,θ)由磁鏈特性Ψ(i,θ)經數據處理后得到。通過對相繞組電壓積分得到相繞組磁鏈值Ψ,通過電流特性i(Ψ,θ)插值得到的電流i,再通過矩角特性T(i,θ)得到電機對應的電磁轉矩。三相繞組產生的轉矩之和即為電機的總輸出轉矩。
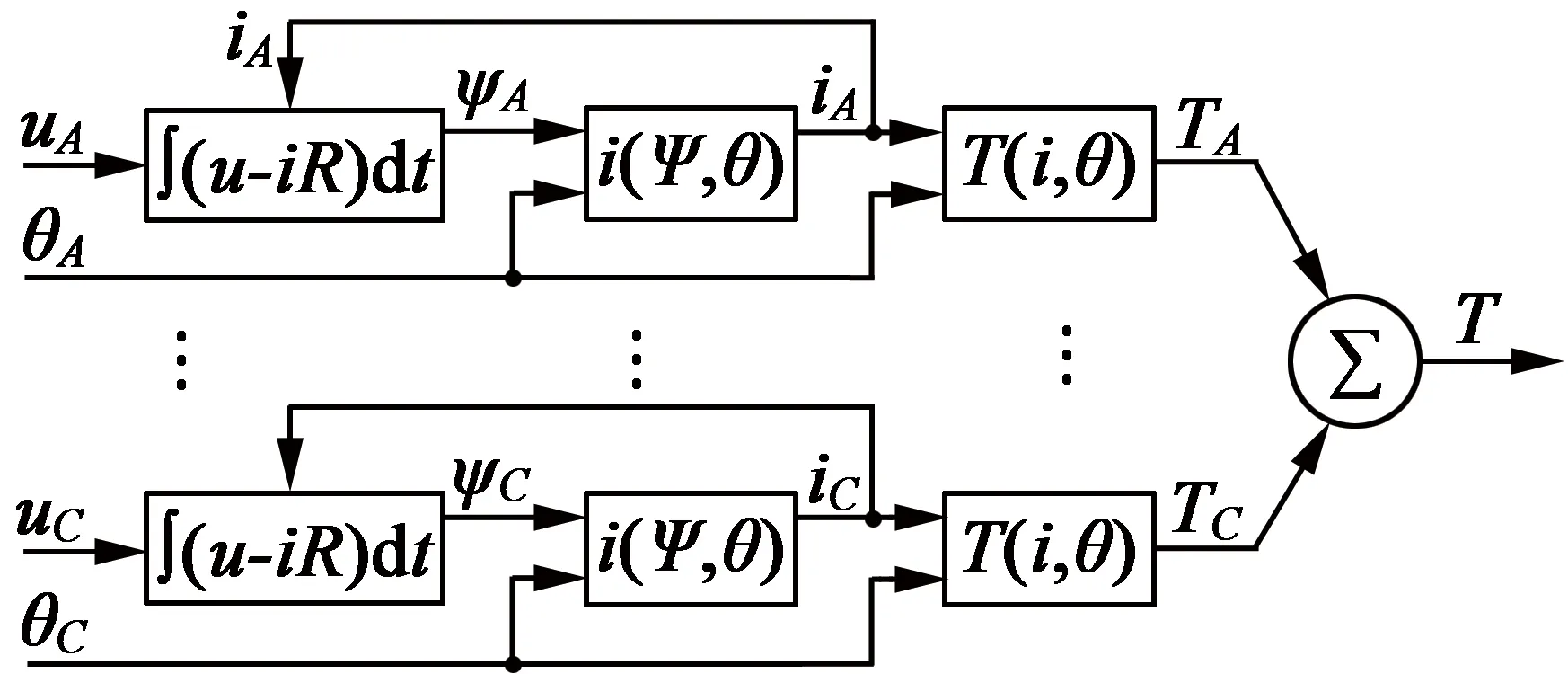
圖4 SRM本體電磁模型框圖
2.3 SRM驅動系統建模
本文根據SRM樣機的驅動系統實驗平臺,搭建了SRM驅動系統的仿真框圖,如圖5所示。該仿真模型是由SRM本體、轉矩平衡方程、PI控制器、功率變換器等模塊構成的雙閉環控制模型,可以實現電源電壓、斬波占空比、開通角、關斷角、目標轉速、負載等基本運行參數設定,可以實現電機的轉速與相繞組電流雙閉環控制,能夠模擬電機的各種給定工況。
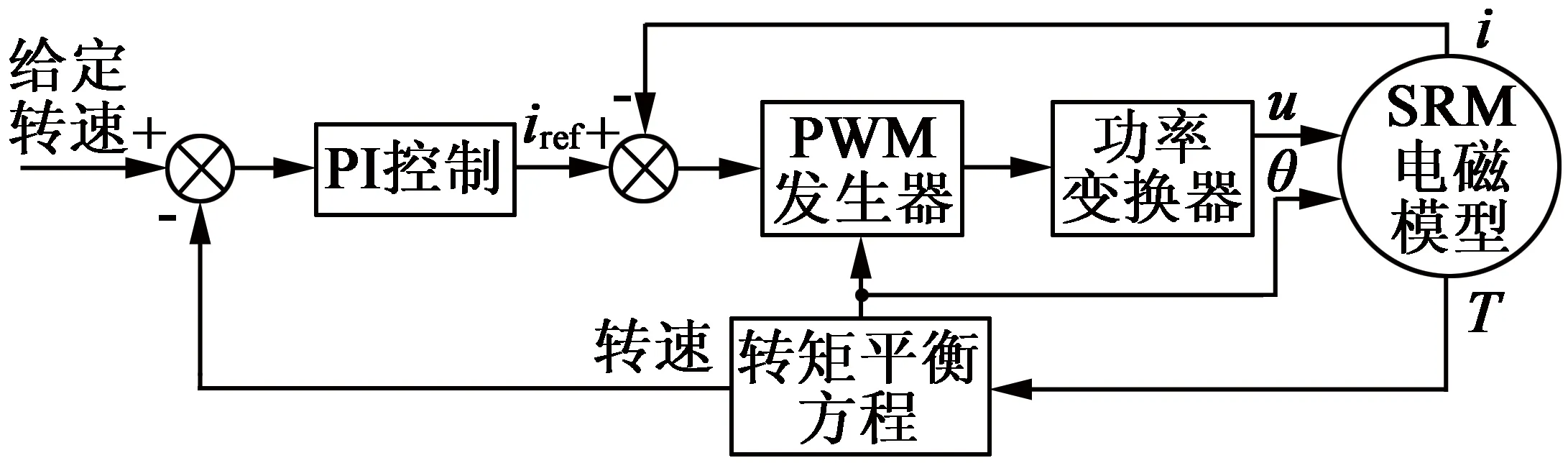
圖5 SRM驅動系統仿真框圖
一般情況下,為使仿真結果更加準確,通常將SRM驅動系統仿真模型的計算步長設置為1 μs左右。但是,樣機實驗平臺上的SRM功率變換器受CPU運算速度的限制,采樣周期通常為0.1 ms左右。事實上,實驗平臺控制器上0.1 ms的一拍延時對相繞組電流波形有明顯影響。為了使仿真計算出的電流波形與實驗平臺電流波形相一致,在仿真模型中加入0.1 ms延時模塊,用于提高仿真電流波形與實測波形的吻合度。
3 SRM驅動系統電流波形仿真與實驗驗證
3.1 樣機主要參數與實驗平臺
SRM電機的主要參數如表1所示。SRM樣機實驗平臺如圖6所示,負載大小由交流變頻回饋加載實驗臺控制,通過霍爾電流傳感器采集電機三相繞組的電流,通過電機與負載之間的轉矩傳感器測量電機的轉速與負載轉矩。
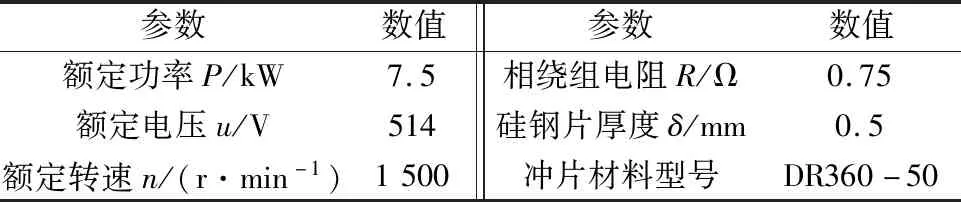
表1 SRM主要參數
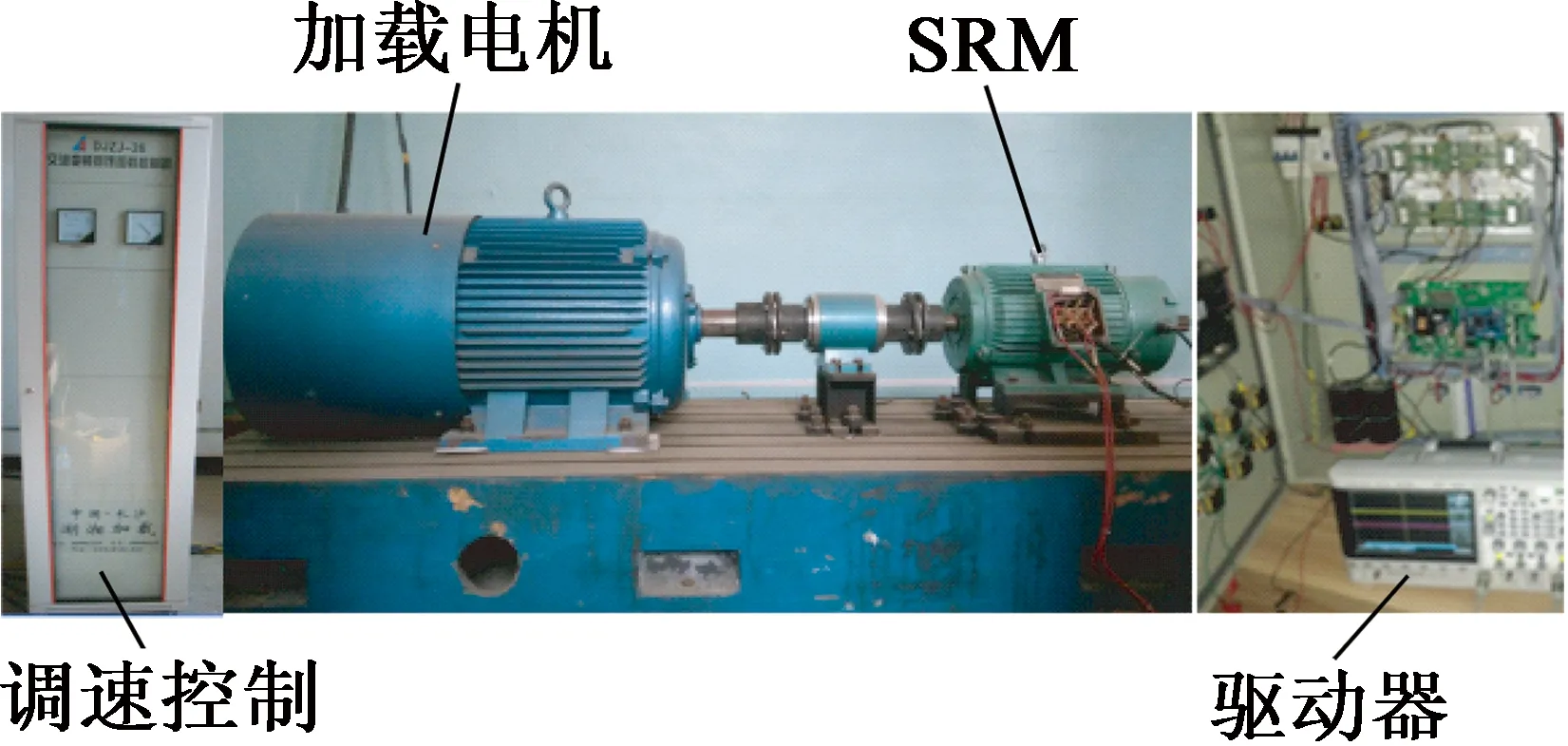
圖6 SRM樣機實驗平臺
3.2 SRM典型工況電流波形仿真與實驗驗證
SRM相繞組電流波形決定了電機的銅損與電機鐵心中的勵磁,準確計算電機相繞組的電流波形對計算電機的損耗很重要。本文做了各工況下SRM驅動系統的運行仿真與實驗驗證。
設定目標轉速為750r/min,負載轉矩為24 N·m,控制方式為電流斬波控制,分別進行Simulink仿真計算和實驗平臺測試。轉速穩定后,分別得到電機三相繞組電流仿真波形與實測波形,如圖7所示。
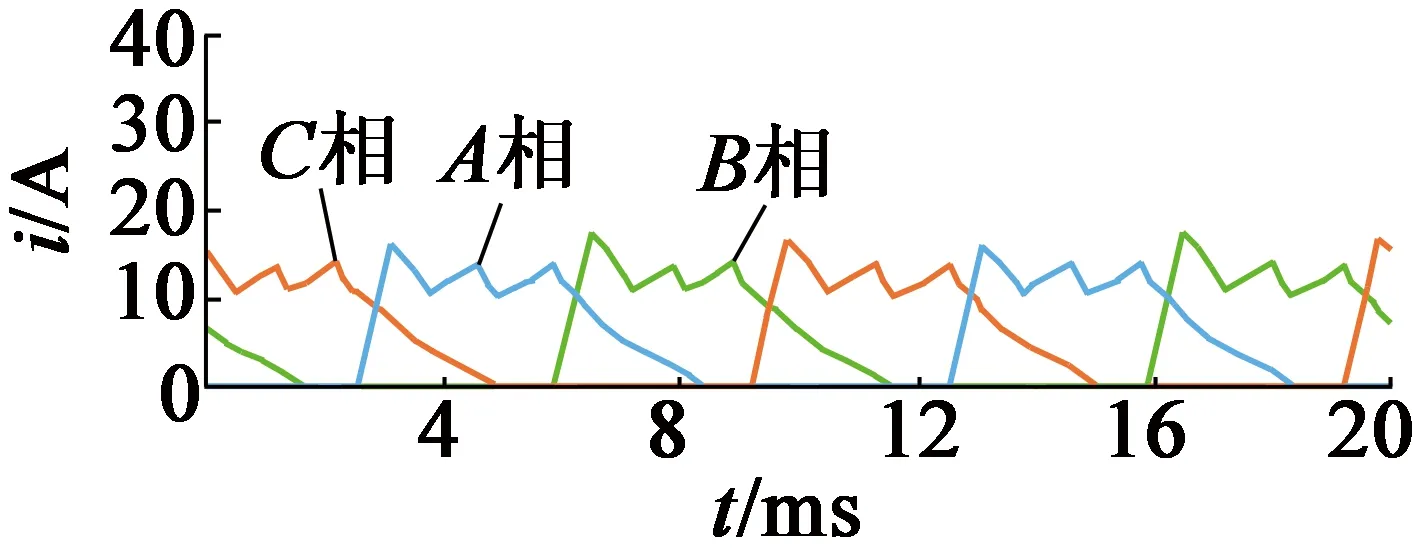
(a) 仿真波形
設定目標轉速為750r/min,負載轉矩為48N·m,控制方式為電流斬波控制,分別進行Simulink仿真計算和實驗平臺測試。轉速穩定后,分別得到的電機三相繞組電流仿真波形與實測波形,如圖8所示。
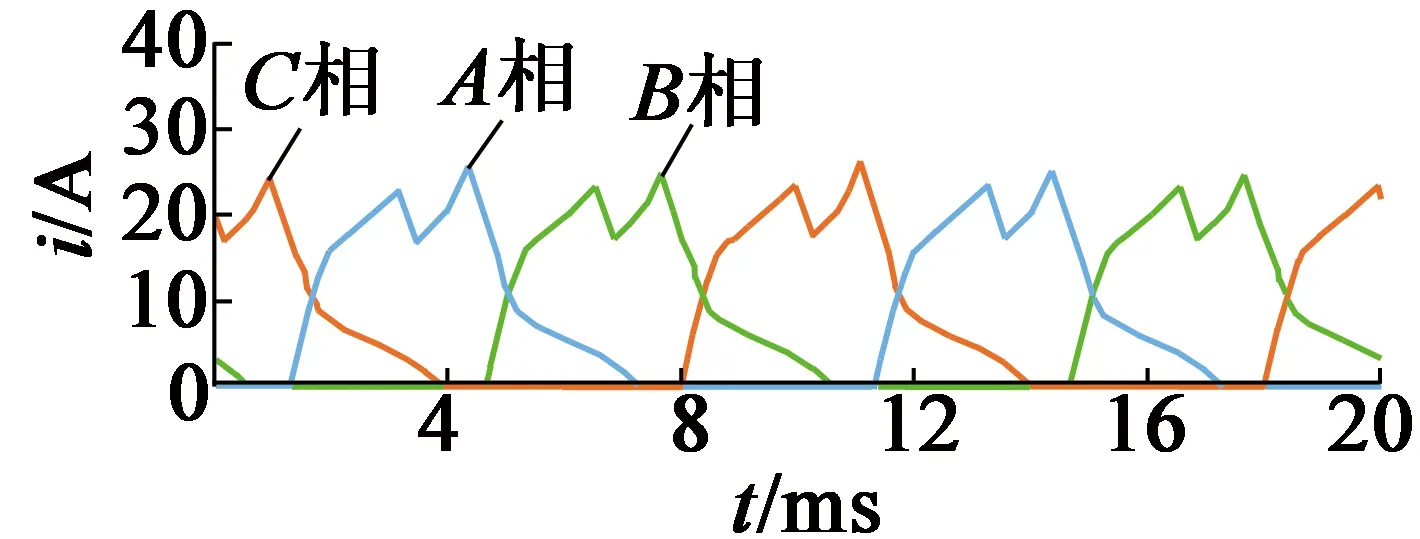
(a) 仿真波形
通過對比相繞組電流的仿真波形與實測波形,可以看到二者高度吻合,證明采用與實驗平臺相同控制策略的SRM驅動系統仿真模型可以較好地模擬SRM驅動系統實驗平臺,可以準確計算電機各工況與控制策略下的相電流波形。該仿真模型運行速度快,可以在模型上做任意工作點電流波形的仿真和反復計算,達到提高電機在不同工作點鐵損和銅損計算精度的目的。
4 基于相電流波形的SRM損耗分析
4.1 電機銅損與鐵損計算
根據仿真得到電流波形,可由式(1)計算出電機的銅損。其中,相繞組電阻R由電橋法測得,i(t)為仿真電流波形,pCu是根據實際電流仿真波形計算得到的銅損。
本文首先使用經過實驗驗證的Simulink電機驅動系統仿真模型計算SRM不同工況下的相繞組電流波形,然后再將相電流波形數據導入JMAG軟件中,并設置與電流波形相對應的轉子位置和轉速后,用時步有限元法計算出該電流波形對應的鐵損。
本文采用基于硅鋼材料多條磁滯回線數據的面積法計算鐵損,計算方法考慮了SRM鐵心內磁通波形的直流偏置和小磁滯回環對電機鐵損的影響[16-18],計算機理更接近實際物理過程。圖9為SRM樣機工作在額定工況下,轉子逆時針轉過一圈時,定轉子鐵心的鐵損密度ρ分布圖。
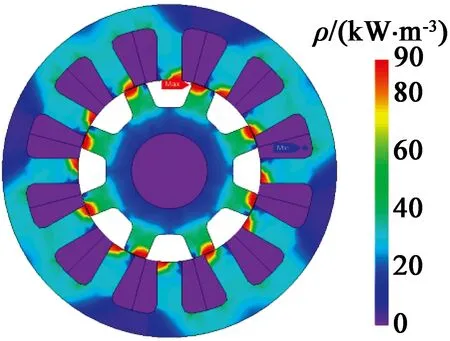
圖9 鐵損密度分布圖
由圖9可知,電機鐵心內的鐵損密度分布極不均勻。由于開關管開通范圍在電感上升區,導通相定子齒尖與正在靠近的轉子齒尖附近磁感應強度很大,故相應的鐵損密度也很大。轉子齒與定子齒對齊之前開關管已提前關斷,定子繞組電流已基本減小至零。當轉子齒遠離定子齒時,鐵心內磁感應強度很小,故定轉子齒尖相遠離側鐵損密度較小。電機轉子旋轉一圈時電機三相繞組輪流導通,各定子齒與轉子齒鐵損密度分布呈中心對稱。
4.2 電機銅損與鐵損的規律性分析
本文仿真計算了樣機在不同轉速條件下滿載運行時的電機損耗,探討同等負載條件下,銅損和鐵損隨轉速的變化規律。
電機的開關角和控制方式設定如表2所示,在開通角范圍之內使用零壓續流,開通角范圍之外采用反壓續流,最大允許斬波電流為30 A,電源電壓為514 V,負載為額定負載,系統為閉環控制方式。表3為不同轉速下額定負載時的銅損與鐵損仿真計算值,圖10為額定負載時電機損耗變化曲線。
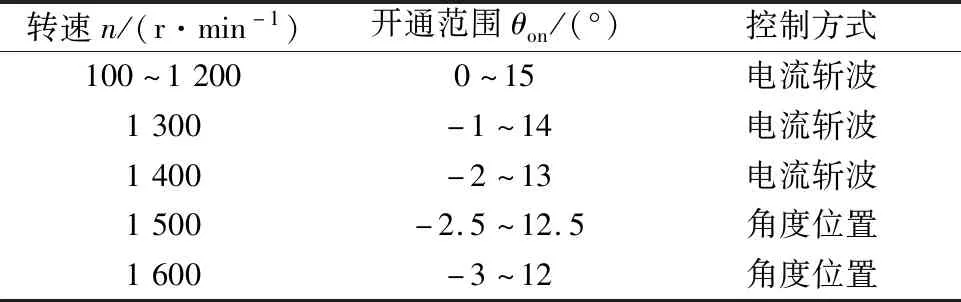
表2 電機的開關角和控制方式
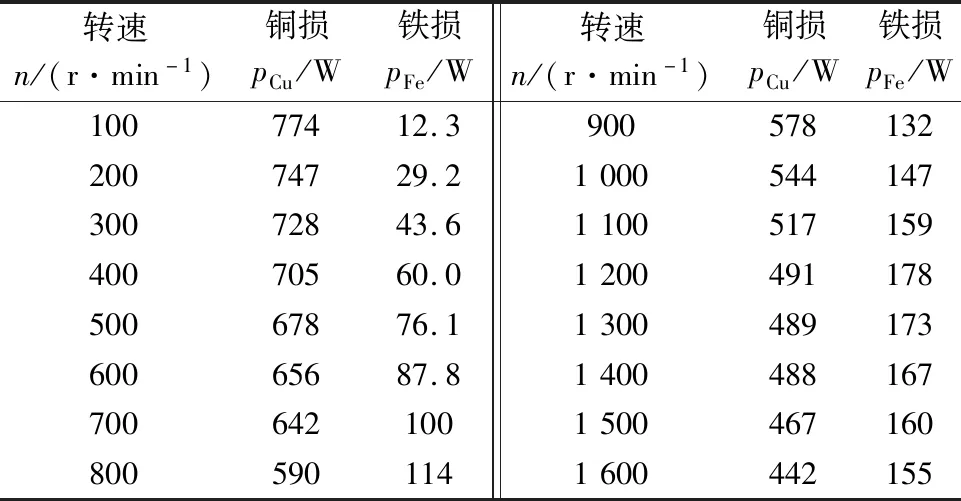
表3 不同轉速下電機銅損與鐵損(額定負載)
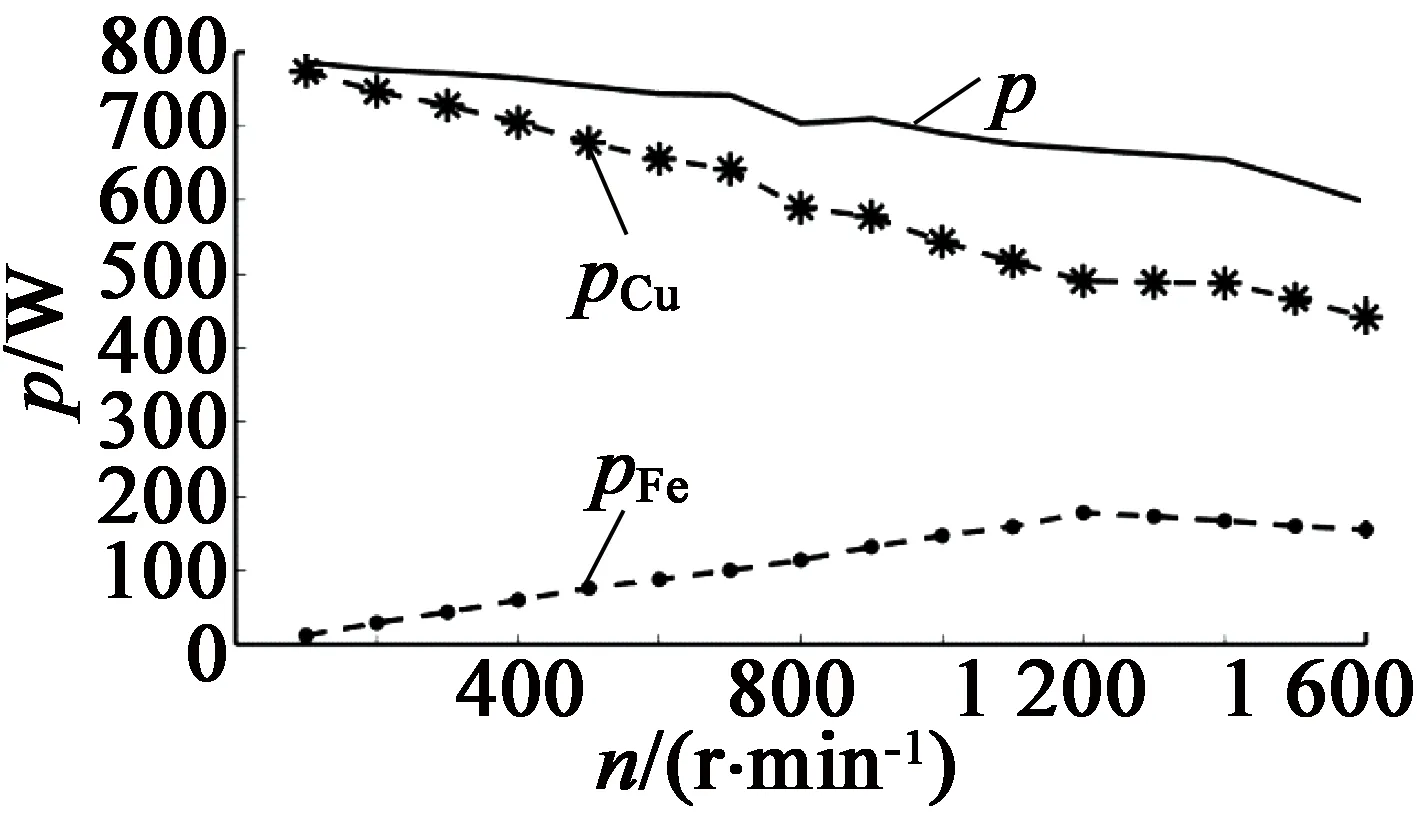
圖10 額定負載時電機損耗變化曲線
從圖10中可以看出,SRM轉速越低,銅損越大。這是因為低速滿載工況下,一個導電周期內,電機電流波形維持在較大電流的時間占比較大。
電機在0~1 200 r/min滿載運行時,電機的鐵損隨轉速的升高而增大,這是電機鐵心內磁場變化頻率隨轉速的升高而增加的結果。當電機轉速超過一定數值時(本樣機為1 200 r/min),電機的鐵損隨轉速升高而減小,這是因為轉速逐漸升高時,相繞組的通電時間隨之縮短,電機相繞組內的最大磁鏈即磁場的最大磁感應強度值隨之減小,其對損耗影響大于頻率增加對鐵損的影響。圖10中,實線為電機的總損耗,可以看出,電機低速滿載運行時的總損耗高于額定工況時的總損耗。
5 結 語
本文提出了一種將SRM Simulink仿真模型與JMAG有限元計算軟件相結合的損耗計算方法。由于Simulink仿真模型采用與實驗平臺相同的控制算法,相電流波形與實驗平臺高度吻合,基于相電流波形計算得到的鐵損和銅損更加符合實際工況。
以額定工況下閉環驅動系統的電流波形作為輸入,給出了銅損的準確計算方法,分析計算了額定工況下的鐵損密度分布圖,得出在旋轉方向上相互靠近的定轉子齒間鐵損密度最大的結論。
分析計算了額定負載條件下不同轉速時的銅損與鐵損,銅損隨轉速升高而減小,鐵損先增加后減小,總損耗中鐵損占比較小而銅損占比較大,且總損耗隨轉速升高而遞減。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
