水下狀態潛艇的靜力學特性及其對操縱運動的影響
2020-11-27 06:47:36施生達呂幫俊彭利坤徐雪峰
艦船科學技術 2020年5期
關鍵詞:深度
施生達,呂幫俊,彭利坤,徐雪峰
(1. 海軍工程大學 艦船與海洋學院,湖北 武漢 430033;2. 海軍工程大學 動力工程學院,湖北 武漢 430033;3. 中國船舶重工集團公司第七○七研究所九江分部,江西 九江 332007)
0 引 言
現代快速、深潛潛艇,在危及潛艇水下操縱安全的諸多事故中,引人特別關注的兩類主要事故[1-2],也是潛艇操縱性設計中,按慣例進行安全性確認需要考核的2種情況[3]:一是高速航行時發生尾升降舵卡(或誤操)下潛大舵角;二是低速航行時發生艙室(大量)進水。尤其當潛艇處于大深度航行狀態,將出現更加緊迫的危急情況。
上述情形,早在20世紀70年代研制SSN 688級潛艇時,美國海軍就采用了1/12縮尺自船模,通過應急機動試驗進行了評估[4-5]。
文獻[6]把操縱事故的危害分為2類:
1)主要事故危害。可能引起潛艇失事;或引起艇上多各艇員嚴重受傷或死亡;或對人命、財產或潛艇外部環境的嚴重威脅。
2)對個體的局部危害。可能引起艇上個別艇員死亡、重傷或輕傷。在安全要求上,對二者采取沒策略來減輕事故的危害,具體說來分別為前者采取“自上而下”地控制主要事故的危害,后者應用“自下而上”地保障崗位健康與安全。
文獻[2]指出:所有潛艇都涉及安全性問題,尤其是處于潛水狀態時。設計者和操縱者,對潛艇發生升降或舵室進水事故時,都必須清楚下列基本狀況:
1)發生了類似主要事故后,潛艇的操縱運動特性是怎樣變化的?
2)要明確最有效的恢復性挽回操縱方法(操縱順序與方法)。
3)通過對潛艇挽回操縱運動特性,與潛艇的潛深和空間姿態安全性要求的比較,確定和平時期巡航時的深度、航速的安全范圍(H0/V0)。
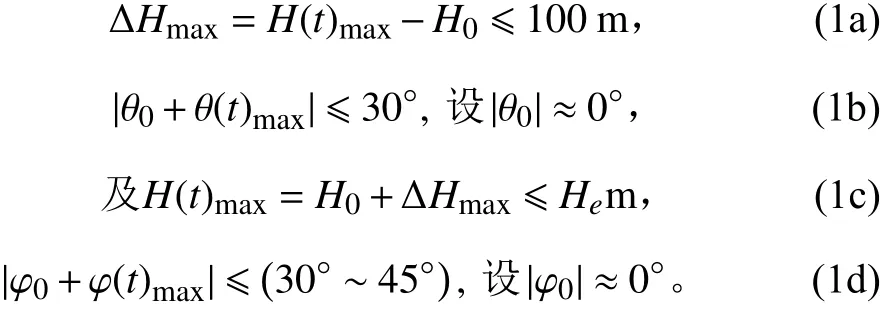
文獻[2]提出的安全性要求是:對上述主要事故經恢復性挽回操縱后,潛艇的潛深和縱、橫傾都應同時保持在下列范圍內,并促使潛艇的初始航行深度H0(及航速V0)按有關規則進行安全性選擇。
對于經過潛艇均衡和按條例補充均衡的水下巡航潛艇,一般是以潛艇運動的航向與深度為基準,處于等速定深直航狀態,其操縱運動特性主要決定于潛艇垂直面運動穩定性的品質、升降舵的操縱能力、艇體水動力的對稱性程度(關于垂直面的)。這些特性是潛艇操縱性設計階段必需考核的重點指標。就潛艇水下航行狀態,關注的控制潛艇操縱運動最主要的參數是潛深H,影響潛深的直接可控因素為航速V、縱傾角 θ和升降舵角 δb,δs(操縱力),即 H=f(V,θ,δb,δs)。
在文獻[6]中,英國對戰略核潛艇的安全功能要求區分為“基本安全功能及更高頂層的”關鍵安全功能。該功能由六大關鍵安全功能組成,第1項即是潛艇操縱,第6項是控制火災危害。為了保證潛艇操縱基本功能,需預防的的操艇事故是碰撞、擱淺和因舵室進水或操縱性失控造成的潛艇“超深”。因此必須保持潛艇結構的完整性(水密性與氣密性)、控制艇的浮力與重量、保持潛艇靜穩性等基本功能,以及完整的推進動力,是對潛艇操縱的直接保證。
由上文可知,升降舵卡與艙室進水事故,是常見的兩類水下操縱安全性問題。本文概括介紹潛艇水下操縱的兩類主要事故由來與危害及應急操縱的基本概念,論述水下狀態潛艇的流體靜力學特性與升降舵的動力學特性,以及它們對潛艇運動與應急挽回操縱的影響,揭示潛艇水下運動過程中縱傾與深度易不穩定的力學上的根本原因。
1 潛艇應急操縱的含義與特點
艦艇操縱大致可分為兩類:控制艦艇運動的操縱與使艦艇靜止(系泊)的操縱。這里只討論控制潛艇運動狀態的應急操縱。
水面艦船的應急操縱性是指艦船應付緊急情況的操縱性能[7]。常用的應急操縱包括全速滿舵旋回和應急全速倒車制動的停船操縱,用于防御突然來襲的兵器、兵力或規避碰撞、擱淺等緊迫局面的應急操縱。
潛艇的應急操縱是指突然發生的失去對潛艇航向、縱傾、深度的操縱事故的統稱。一般是指危險縱傾、舵卡和艙室進水的應急挽回操縱,通常還包括火警,但滅火救災斗爭與舵卡、進水事故的動力抗沉斗爭,在具體操作上有顯著區別,本文只涉及動力抗沉問題。
尾舵卡、艙室進水事故的動力抗沉具有2個顯著特點[8]:
1)時間上突然發生,空間上事故運動幅度大,變化快;
2)危害極其嚴重,涉及潛艇的存亡。
航海實踐表明,在應急操縱工況下,受力不易確定,多種外力影響下的艦艇運動響應也是較復雜而緊迫的,而控制潛艇運動的手段和能力是有一定限度的。一般把應急操縱歸屬潛艇大機動及特殊工況下操縱運動研究,是潛艇操縱性研究的難點和熱點,受到廣泛特別關注。
2 潛艇靜力學與操縱動力學特性
核潛艇出現之前,潛艇工程師和艇員關注的操縱問題主要是:潛艇的操縱控制裝置是否能夠滿足潛艇在垂直面內運動控制的使用要求(特別是在近水面的潛望深度),即可能存在深度(縱傾)控制的操縱能力不足的問題。
但是,在核潛艇為代表的現代潛艇問世之后,關注的重點發生了根本的變化,除了上述潛艇機動性操控的基本要求外,還必須實現潛艇在垂直面內的深度機動性和運動穩定性之間的平衡。高速大舵角的深度機動會形成幾十度縱傾和很快的大幅度深度變化,出現了潛艇的縱傾角/深度操縱隨航速變化( H/θ~V)的巨大風險。因此,在潛艇深度變化及保持深度與潛艇航向變化及保持航向之間,將更多地關注潛艇的深度變化和保持深度問題。而現代潛艇操縱的上述特征是由靜力學與操縱動力學特性決定的。
2.1 水下狀態潛艇的流體靜力學特性
水下狀態的潛艇有2個突出的流體靜力學特性:
1)潛艇水下儲備浮力為0
潛艇設計水線以上所有水密容積,包括水密艇體和附體的容積等提供的浮力,稱為儲備浮力,用Vrb表示,單位是m3,并與主壓載水艙里水的容積相等,是潛艇正常下潛條件之一,在較早的潛艇時代,用來衡量潛艇在風浪中安全航行的能力,并表示水面抗沉和水下自浮能力的好壞。對于單殼體潛艇約為10%~20%? ↑ ( 注 ? ↑為潛艇水下排水量,m3),雙殼體潛艇為25%~30%? ↑。但是,水下狀態的潛艇之儲備浮力為0,潛艇依靠浮力直接支撐平衡艇的重量,要求潛艇處于“中和浮力狀態”或“零浮力狀態”,即潛艇的浮力和艇的重量相等。為此,艇上設置了多種保障系統、裝置及設備,如浮力調整系統及其包含的浮力調整水艙、疏水泵、艙底泵等,縱傾平衡系統及其包含的縱傾平衡水艙、中壓氣管路、四通操縱旋塞等。
潛艇為什么要設計成中和(或零)浮力狀態?
如果潛艇的重量大于浮力或小于浮力,為了保持潛艇的深度,就必須要求潛艇維持一定航速,提供一定動升力,實現對潛艇深度的控制。但是,軍用潛艇的戰術使用則要求潛艇能在水下懸停或以很低的航速(如2~3 kn)航行的要求。潛艇與飛機不同,潛艇正常情況下是不依靠向前運動產生的動升力來支撐潛艇的重量。
潛艇的技術與戰術特點要求其具有低速運行,此時艇體和舵的水動力,對潛艇存在的由艇的實際重量與浮力造成的浮力差、力矩差(或稱剩余浮力及其力矩)的平衡能力是很低的。所以,潛艇必須處于中和浮力狀態。
零儲備浮力狀態,決定了水下潛艇對于浮力和重量這兩者的變化都很敏感,容易出現“掉深”,甚至深度失控,尤其是低速的經航工況航行時,潛深波動大,監控不當容易形成下潛慣性。
2)水下狀態潛艇的靜穩性力矩小
潛艇水下狀態的平衡穩定是與水面艦船完全不同的流體靜力學狀態。此時潛艇的穩性條件變為艇的重心G必須位于浮心C之下(見圖1)。因為水線面面積的消失,潛艇的縱橫穩定中心M,m與浮心C等三心重合了。因此,水下狀態潛艇的縱穩性與橫穩性基本相等,其縱傾1°扶正力矩M與橫傾1°扶正力矩相等,或表示成:


圖 1 處于水面和水下狀態的潛艇橫穩性Fig. 1 Transverse stability of submarine in surface and submerged states
對于現代潛艇約為10~25t ·m/(°),與水上狀態縱傾1°的扶正力矩相比差別極大。如蘇聯的33型潛艇,水上排水量1 319.36 t,其水上狀態約為1 940 t ·m/(°) , 而水下狀態僅為5.4t ·m/(°)。
所以,水下狀態中高速工況發生尾升降舵卡或低速艙室大量進水事故時,產生大的縱傾力矩,就容易出現縱傾失控,形成幾十度危險縱傾;反過來,當突發大縱傾時,必然有很大的縱傾力矩克服了相應的扶正力矩,這個縱傾力矩來自何處呢?通常情況下主要由艙室進水產生,或由升降舵角產生的。
2.2 潛艇尾升降舵的流體動力學特性
1)各種航速舵角下的首舵卡,均可用尾舵保持操控
首升降舵位于指揮室圍殼上或艇體首部,與尾升降舵相比,更臨近潛艇的垂直面水動力作用中心,在具有相同舵力系數和舵角下,首舵產生潛艇縱傾和垂向速度的能力大約是尾升降舵的1/3[2],甚至數倍之差。因此,各種工況下的首舵卡,正確操縱尾升降舵都可抑制其影響(見圖2)。
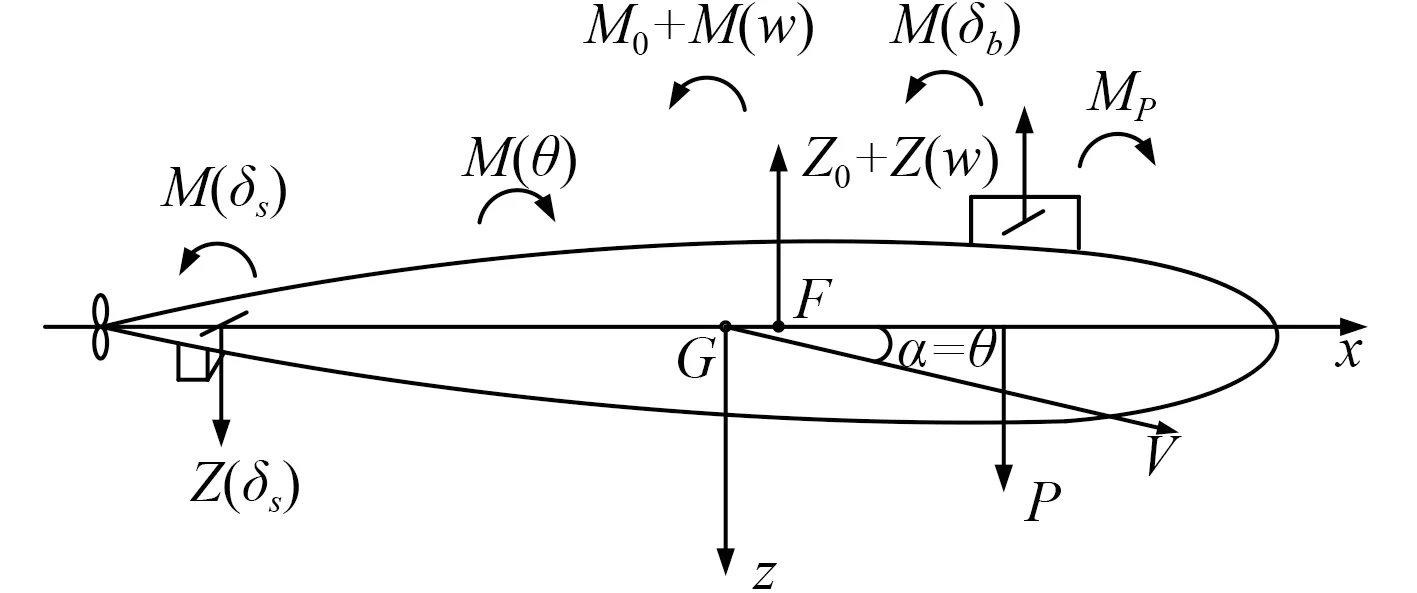
圖 2 有縱傾等速定深運動Fig. 2 Keeping depth in a constant velocity with a trim
2)根據潛艇操縱性理論,潛艇的變深機動可近似看成定常潛浮運動
該運動具有下列特性[2]:
一定航速時操縱尾升降產生縱傾角的能力為
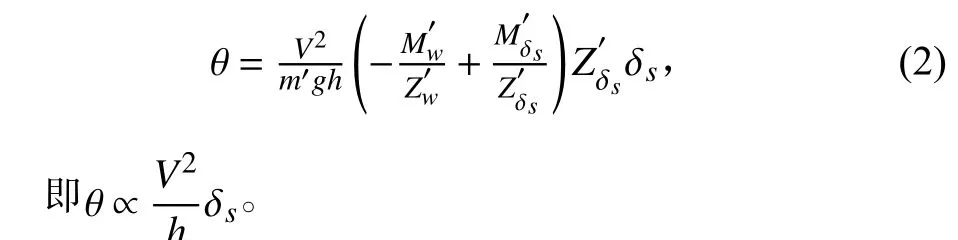
一定航速時操縱尾升降舵產生垂向速度的能力為

操升降舵產生的深度變化可表示成為

可見,當高速大舵角時,潛艇的縱傾和潛深改變迅速,易使潛艇縱向失穩或深度失控。潛艇操縱性設計上,通常尾升降舵面積是按軍用標準所規定航速時單位舵角產生一定垂向升速率的能力來決定的,如文獻[2]是用所謂“平均航速”設計的,相關資料表明是指“航渡速度”,約為7 kn。我國是參照蘇聯/俄羅斯的有關文獻規定的,取10 kn作為設計航速。
因此,當潛艇高速航行時,尾升降舵就顯得過于“龐大”,滿舵時存在很大的潛在風險,如升降舵舵角1°時,潛艇部分航速的水動力特性如表1所示(首舵系圍殼舵)。

表 1 某艇不同航速時的升降舵水動力(矩)Tab. 1 Hydrodynamic force caused by a submarine elevators
尾升降舵面積,可通過選用較高設計航速來限制。但是,當發生艙室進水事故時,尾升降舵的高效操縱力,將有效的支持高壓氣吹除的挽回作用。為保證操艇安全,就出現了多種操縱性安全技術,如采用按航速高低對尾升降舵角的限用技術,在升降舵裝置構型上采用了:左右舵舵時可分別操縱的分離舵(或稱差動舵)(英)、大小舵(俄)或分片舵(美)等新穎尾舵裝置,提高尾舵操縱的安全性和機動性能。
3 常見案例及事故原因分析
3.1 危險大縱傾
潛艇在執行巡邏任務中,大深度航行期間,艇的縱傾由無縱傾狀態變成首傾至18°,深度增大近60 m,航速進行了減速操縱,仍接近中速工況;潛艇完好,沒有發生進水,動力推進裝置工作正常。試分析判斷該艇事故狀態。
混淆本例的因素有:在此前已進行了大約20 s應急操縱,如下令停車、排水、吹除中組抑制下潛慣性等,在此期間艇的潛深增大約10 m。分析的關鍵有兩方面:
1)艇的首縱傾從何而來?什么原因使潛艇從尾縱傾變成大的首縱傾?如艇的水下縱傾1°扶正力矩則造成近20°首傾約需300 t ·m的首縱傾力矩。在沒有進水情況下,由于海水密度的變化產生的浮力差,作用于浮心,其力矩差是不大的,顯然只有尾升降舵誤操了下潛滿舵時,在較大航速下,才可能形成這樣大的操縱能力。如果艙室進水了,將增加事故分析判斷的復雜性。
2)潛艇深度增大是艇重了嗎?還是另有原因?
當潛艇浮力減小、艙室進水或消聲瓦與艇體壓縮等都可能引起艇重掉深,但在本例狀態下,艇體完好,艇體壓縮產生的負浮力是不大的,下潛深度的迅速增加,顯然是由于大的首縱傾,在較高航速推進下造成了潛艇的快速下潛,并形成了下潛慣性。
針對性應急挽回操縱的主要方式
1)立即檢查尾升降舵的工作狀態,并立刻調整,按需操縱,控制潛艇縱傾;
2)立即采用應急吹首且主壓載水艙,操相對上浮艇或應急倒車,快速恢復縱傾;
3)應急吹除,直浮水面,注意潛艇姿態,控制深度;
4)對大深度狀態的應急挽回操縱要有足夠的力度,類似供氣吹除初始狀態時“要猛”、“要狠”。對已形成顯著下潛慣性狀態,要果斷應急吹除上浮。
3.2 艙室進水
潛艇艙室破也進水類似于重力作用下容器壁面小孔出流,其出水速度可表示為:

則艙室進水流量Q用自由進水公式表示為:

式中:A為進水孔面積,m2;H為進水孔的壓頭,m。Cn為流量系數,取Cn=0.6~0.7,瑞典SSPA取0.7,水面狀態取0.6。
如在100 m深度處,破口直徑300 mm,面積A=0.07 m2,當取Cn為0.7時,進水量約為Q=2m3/s 。
又如在200 m深度處,破孔直徑5 in,破孔面積A≈0.012 67 m2,取Cn=0.6時,進水量Q≈0.475 9 m3/s≈0.5 m3/s。
對于破孔直徑100 mm情形,流量系數Cn=0.7時,深度100 m,200 m,300 m時的進水量Q如圖3所示。

圖 3 通過耐壓船體直徑100 mm的破損孔流入的水量Fig. 3 The amount of water flowing into the vessel through a 100mm diameter damaged hole in the pressurized hull
可以看出:
1)大深度發生潛艇進水事故,往往會造成大量進水。用于應急挽回的時間很短,只有幾十秒鐘。
2)對海水冷卻管路破損,應立即關閉相應的截止舷側閥。
3)發生進水事故后,要第一時間進行壓載水艙吹除。有時,由于受崗位職能的影響,采用習慣性的均衡(排水、移水)方式來應急挽回無異于“杯水車薪”,但在潛艇狀態受控后,且在小于安全深度以內時是有意義的。
4)當艉部艙室進水,將導致螺旋槳停車。由于艇速太低,艇的操控力小,易產生過大的尾縱傾(40°~50°),為此,在設計上可用增大尾部主壓載水艙的容積來彌補。對于首部進水,當電力系統可用,應增速至最大,增加潛艇的可控性,控制艇的尾縱傾處于較理想狀態,通常認為從大深度浮起時是20°~25°左右。
3.3 常見的事故原因
航海實踐的經驗教訓表明,促使潛艇處于抗沉應急操縱險境的常見原因大致如下:
1)操縱失誤及舵裝置故障
如操縱人員把上浮舵在忙亂緊迫狀態下誤操為下潛大舵(滿舵)角;或發生“跑舵”為下潛滿舵;或劇烈地機動過程中,頻繁操縱與大舵角變換等造成液壓失靈、零部件/元器件、操舵裝置故障。
2)通海管路破損進水
管路腐蝕、老化,加上長時間大潛深航行的高壓作用,可能發生爆管現象。
3)頻繁執行任務或遠航巡邏返航途中,人員的警惕性較低,機械設備處于疲勞狀態,也是造成緊迫操縱局面的又一種尋常原因。
4)操縱人員對危險航行狀態缺少潛艇操縱模擬器上的操作演練,并缺乏對水下狀態操縱性主要的基本流體靜力學特征的認識及判斷。
由多次應急挽回操縱過程可見,要總結好兩方面經驗教訓:
5)對典型主要事故如尾舵卡、艙室進水、火警等要明確事故的基準狀態,明確相應的挽回操縱的基本方式與操作順序,建立操縱指南性規則。
4 結 語
水下航行狀態潛艇的縱傾、深度與航向,是潛艇運動位置和姿態的主要參數,也是潛艇操縱運動的基本操控目標參數。中高速尾升降卡、低速艙室進水等主要事故,將迅速產生顯著縱傾力矩、負浮力,很快造成大縱傾,造成潛深快速偏移,嚴重威脅潛艇的安全。
水下抗沉操縱的關鍵因素是時間、航速和抗沉操縱設備(如高壓氣系統等)等三要素,以實現安全應急上浮:
1)抗沉挽回時間以秒計,要做到及時發現、及時報告、及時判斷和決策、及時執行、果斷行動;
2)艙室進水時的抗沉操縱中航速的使用,主要決定于艇的縱傾角狀態。原則上,尾縱傾時應增速,首縱傾時應減速。結合實際,酌情處理縱傾角度大小情形時的影響;
3)用好高壓氣,進行正確吹除,尤其當存在首尾端進水時,應首先吹除進水一端的主壓載水艙,并控制艇的深度和縱傾與上浮狀態。當縱傾接近90°時,橫穩性迅速減少到0[1]。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57