異質(zhì)車輛隊列系統(tǒng)參數(shù)化協(xié)同預(yù)測巡航控制
2020-11-27 06:56:12何德峰顧煜佳
浙江工業(yè)大學(xué)學(xué)報 2020年6期
關(guān)鍵詞:模型
何德峰,顧煜佳,羅 捷
(浙江工業(yè)大學(xué) 信息工程學(xué)院,浙江 杭州 310023)
隨著移動通信、智能感知等先進信息技術(shù)的發(fā)展,自動駕駛成為國內(nèi)外智能交通系統(tǒng)(Intelligent transport system, ITS)的研究熱點[1-3]。近年來,以自適應(yīng)巡航控制(Adaptive cruise control, ACC)為核心的輔助駕駛系統(tǒng)(Advanced driver assistance system, ADAS)日趨成熟,能夠根據(jù)車間距和前車速度等信息調(diào)節(jié)自車速度,實現(xiàn)自主跟馳的目標[4-7]。在ACC的基礎(chǔ)上,加入車-車通信和車-路通信等技術(shù),使車輛能夠獲取更加精確的道路信息,實現(xiàn)協(xié)同式自適應(yīng)巡航控制(Cooperative adaptive cruise control, CACC)[8-10]。與ACC相比,CACC能夠獲取更豐富、更準確的道路信息,并在保證弦穩(wěn)定的條件下縮短車輛跟馳距離[11-13]。
國外對CACC的研究起步較早,在隊列弦穩(wěn)定性、通信時滯和控制算法等方面開展了大量的研究工作。Ploeg等[14]針對弦穩(wěn)定定義模糊、穩(wěn)定性理論分析缺乏等問題,將隊列模型推廣到一個非線性級聯(lián)狀態(tài)空間系統(tǒng),根據(jù)輸入—輸出特性,提出了一種新的弦穩(wěn)定定義,通過由6 輛汽車組成的車輛隊列進行實驗,證明了該定義的可行性。在此基礎(chǔ)上, Ploeg等[15]假設(shè)車輛間的通信存在固定時滯,設(shè)計了一種基于L2弦穩(wěn)定的H∞最優(yōu)控制器,并通過實驗驗證了其弦穩(wěn)定性和控制器控制效果。Oncu等[16]考慮了由于網(wǎng)絡(luò)帶寬的限制或多個節(jié)點共享同一介質(zhì)引起的無線網(wǎng)絡(luò)傳輸時滯,從網(wǎng)絡(luò)控制系統(tǒng)的角度來設(shè)計CACC系統(tǒng),提出一種網(wǎng)絡(luò)控制系統(tǒng)建模框架,并分析了在此框架下采樣時間和恒定的網(wǎng)絡(luò)時滯對弦穩(wěn)定性的影響。Xing等[17]綜合考慮了執(zhí)行器時滯和網(wǎng)絡(luò)時滯,使用Padé近似,將時滯表示為傳遞函數(shù)的形式,在此基礎(chǔ)上設(shè)計了一種PD控制器并分析了其弦穩(wěn)定性和單車穩(wěn)定性,該方法同樣適用于其他線性控制器,為處理時滯系統(tǒng)控制器設(shè)計問題提供了新思路。Luo等[18]考慮了自動駕駛車輛在行駛過程中的安全性、舒適性和燃油經(jīng)濟性,提出一種基于模型預(yù)測控制(Model predictive control, MPC)的多目標ACC算法,通過對各種典型交通場景的仿真,證明算法能夠顯著提高各個性能指標。Roozbeh等[19]針對CACC系統(tǒng)分別設(shè)計了PD控制器和MPC控制器,通過實驗發(fā)現(xiàn),MPC控制器由于可以處理系統(tǒng)的約束條件,因此能夠取得更好的控制效果。He等[20]針對車輛巡航過程中的多目標控制問題,將理想點多目標處理方法和MPC相結(jié)合,設(shè)計了一種理想點追蹤的多性能巡航經(jīng)濟預(yù)測控制器,并采用基于攝動的序列二次規(guī)劃算法來減少在線求解的計算量。在現(xiàn)有的CACC系統(tǒng)控制中,MPC由于能夠顯式地處理被控系統(tǒng)約束并且具備性能優(yōu)化的優(yōu)勢[21-23],已經(jīng)成為解決CACC系統(tǒng)巡航控制問題的一種主流控制方法,但是MPC算法復(fù)雜的計算量會對系統(tǒng)的快速性造成影響,階梯式控制策略是降低MPC算法在線計算量的有效方法之一[24-26]。筆者考慮網(wǎng)聯(lián)條件下異質(zhì)車輛隊列的協(xié)同巡航控制問題,提出一種基于階梯式控制策略的預(yù)測巡航控制算法。首先,根據(jù)縱向車輛隊列的運動學(xué)關(guān)系建立CACC系統(tǒng)模型,通過反饋線性化將其轉(zhuǎn)化為線性模型;然后,考慮車輛在行駛過程中的安全性、舒適性和燃油經(jīng)濟性等指標,結(jié)合系統(tǒng)約束定義最優(yōu)控制問題并引入階梯式控制策略設(shè)計參數(shù)化預(yù)測巡航控制器;最后,通過仿真實驗證明筆者設(shè)計的控制算法的有效性以及與傳統(tǒng)MPC算法相比,其所需的在線計算量更小。
1 系統(tǒng)模型與問題描述
筆者設(shè)計出由n輛不同結(jié)構(gòu)和參數(shù)的汽車組成的異質(zhì)車輛隊列系統(tǒng)[27-28],如圖1所示。各車通過裝載的傳感器獲取自車的運動狀態(tài)信息(如速度、與前車間距等),同時通過專用短程通信網(wǎng)絡(luò)接收來自前車的加速度并向后車發(fā)送自車的加速度信息。

圖1 車輛隊列系統(tǒng)Fig.1 Schematic of vehicle platoon systems
根據(jù)車輛隊列的縱向運動學(xué)關(guān)系,定義第i輛車為
(1)
式中:di為第i輛車與第i-1輛車的車間距;pi和pi-1分別為第i輛車與第i-1輛車的位置;li-1為第i-1輛車的長度;ds,i為第i輛車與第i-1輛車的理想車間距;vi和vi-1分別為第i輛車和第i-1輛車的速度。采用車頭時距模型定義理想車間距,即
ds,i=hivi+d0
(2)
式中:hi>0為第i輛車的車頭時距;d0>0為最小安全車間距。建立車隊中第i輛車的動力學(xué)模型為
(3)
式中:ai(t)為第n輛車的加速度;ai-1(t)為第i-1輛車的加速度;ci為第i輛車的控制輸入量。分別定義fi(vi,ai)[29]和gi(vi)為
(4)
(5)
(6)
式中ui為第i輛車的控制器輸出量。將式(6)代入式(3),整理可得線性模型為
(7)
假設(shè)通信網(wǎng)絡(luò)不存在時滯,將模型(7)用狀態(tài)空間模型表示為
(8)
對上述狀態(tài)空間模型進行離散化可得離散狀態(tài)空間方程為
xi(k+1)=A1,ixi(k)+
B1,iui(k)+G1,iqi(k)
(9)
進而考慮到車輛存在物理結(jié)構(gòu)上的限制,且在行駛過程中需要保證安全性和跟車性,控制輸入和控制輸入增量約束式分別為
umin≤u(k)≤umax,Δumin≤
Δu(k)≤Δumax
(10)
式中:umin和umax分別為最小控制輸入量和最大控制輸入量;Δumin和Δumax分別為最小控制輸入增量和最大控制輸入增量。同時,系統(tǒng)的狀態(tài)變量約束式為
(11)
式中:vi,max為第i輛車的最大速度;vr,min和vr,max分別為最小相對速度和最大相對速度;ai,min和ai,max分別為第i輛車的最小加速度和最大加速度。
2 參數(shù)化協(xié)同預(yù)測巡航控制
智能網(wǎng)聯(lián)車輛借助移動通信實現(xiàn)車輛間的信息互換,使其具備在復(fù)雜環(huán)境下傳感感知、控制執(zhí)行等功能,以實現(xiàn)安全、高效、舒適和節(jié)能的智能駕駛。針對車間距跟蹤誤差和兩車相對速度,要求跟車過程中自車在理想車間距的條件下保持與前車一致的速度行駛,故定義當前采樣時刻k的跟蹤性能指標為
(12)
式中權(quán)重系數(shù)wd>0且wv>0。同時,考慮到車輛的急加速和急減速會造成發(fā)動機燃油消耗過大,定義燃油經(jīng)濟性能指標[6]為
(13)
式中權(quán)重系數(shù)wa>0。為了抑制車輛加速度的變化對駕駛員和乘客舒適性的影響,應(yīng)該減小控制輸入的變化,即減少加速度,定義舒適性性能指標為
(14)
式中權(quán)重系數(shù)wdu>0。通過對上述單個性能指標求和,可以將加權(quán)的有限時域代價函數(shù)[30-32]表示為

(15)
式中:W(k)=diag {we(k),wv(k),wa(k)} ,各權(quán)重代表控制目標的相對重要性。
引入階梯式控制策略,將預(yù)測時域內(nèi)的控制增量參數(shù)化為當前時刻控制增量的幾何比例函數(shù),其比率為β,則階梯式控制量Δui(j|k)在步長為p的預(yù)測時域內(nèi)可表示為
Δui(j|k)=βΔui(j-1|k)
j=1,2,…,p
(16)
進一步簡化為
Δui(j|k)=βjΔui(0|k)
j=1,2,…,p
(17)
式中:常數(shù)0<β<1為階梯因子;Δui(j|k)為在k時刻對未來k+j時刻的預(yù)測值。
根據(jù)式(9,17),可預(yù)測本車的未來狀態(tài)為
(18)
式中j=1,2,…,p。由于只能獲取當前時刻k的前車加速度q(k),在這里假設(shè)q(p|k)=…=q(1|k)=q(0|k),因此可以將式(18)整理為
(19)
將式(19)用緊湊的矩陣形式表示為
Xi(k+1)=Sxxi(k)+
SuΔui(k)+Seqi(k)
(20)


(21)


(22)

定義當前時刻k的協(xié)同預(yù)測巡航最優(yōu)控制問題式為
(23)
(24)
參數(shù)化協(xié)同預(yù)測巡航控制器的算法步驟為
Step1設(shè)置協(xié)同預(yù)測巡航控制器參數(shù)Ts,p,β,W和wdu,設(shè)置控制量初始時刻值u(0)。
Step3應(yīng)用式(24)計算汽車當前時刻的協(xié)同預(yù)測巡航控制量。
Step4令k=k+1,返回第2步。
3 仿真與分析
為了驗證筆者提出的網(wǎng)聯(lián)異質(zhì)車輛隊列系統(tǒng)階梯式模型預(yù)測控制算法的控制效果,在MatLab R2018a平臺上進行仿真驗證,分析所提出算法的弦穩(wěn)定性、控制效果和算法的在線計算量。
仿真對象為5 輛異質(zhì)汽車組成的縱向車輛隊列,即n=5,各車參數(shù)如表1所示。
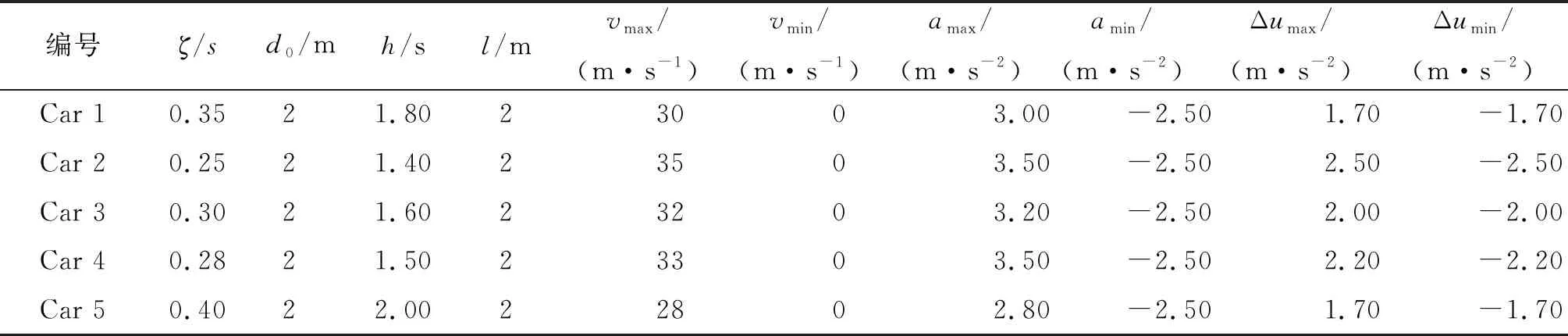
表1 車輛隊列模型參數(shù)Table 1 Model parameters of vehicle platoons
設(shè)置仿真時間為Tsim=40 s,采樣周期Ts=0.2 s,預(yù)測時域p=10,為了使車輛加速度曲線和速度曲線更加光滑,取柔化因子β=0.9,同時取性能指標的權(quán)重系數(shù)we=2,wv=2,wa=3,wdu=4。設(shè)置了兩種工況來驗證算法:第一種工況為加速行駛工況,隊列中5 輛汽車的初始速度均為10 m/s,初始位置分別為p1=68 m,p2=51 m,p3=34 m,p4=17 m,p5=0 m,勻速行駛2 s后,頭車開始進行變加速運動,在20 s后保持23.32 m/s的速度勻速行駛;第二種工況為加速行駛工況,隊列中5 輛汽車的初始速度均為23.32 m/s,初始位置分別為p1=147.92 m,p2=110.94 m,p3=73.96 m,p4=36.98 m,p5=0 m,勻速行駛2 s后,頭車開始進行變加速運動,在20 s后保持10 m/s的速度勻速行駛。兩種工況的仿真結(jié)果如圖2~7所示。
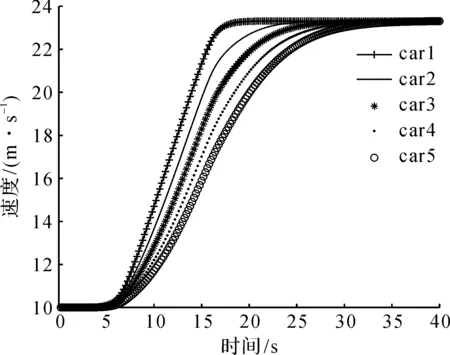
圖2 工況一車輛速度曲線Fig.2 Velocity profiles of vehicles in scenario 1
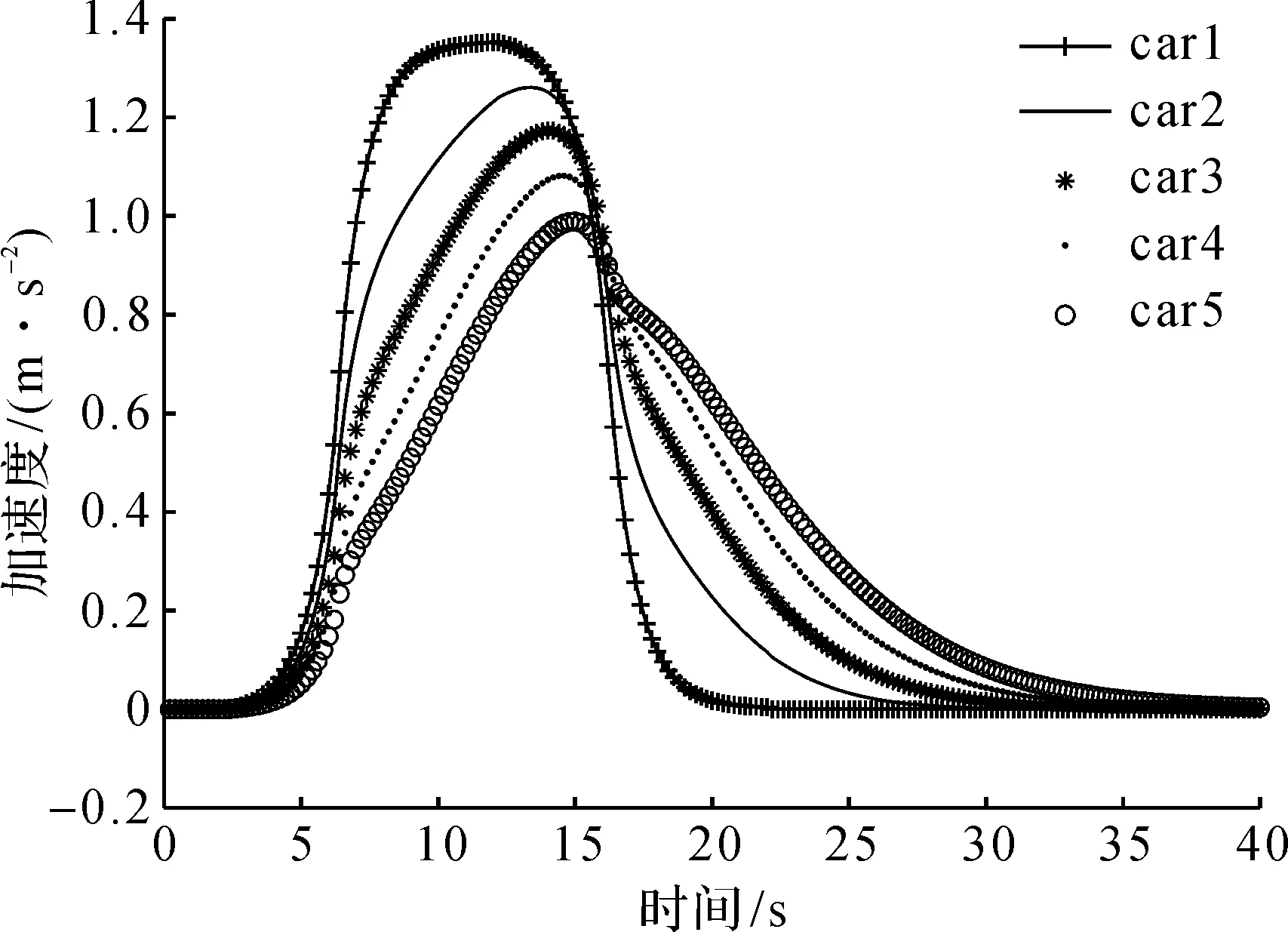
圖3 工況一車輛加速度曲線Fig.3 Acceleration profiles of vehicles in scenario 1
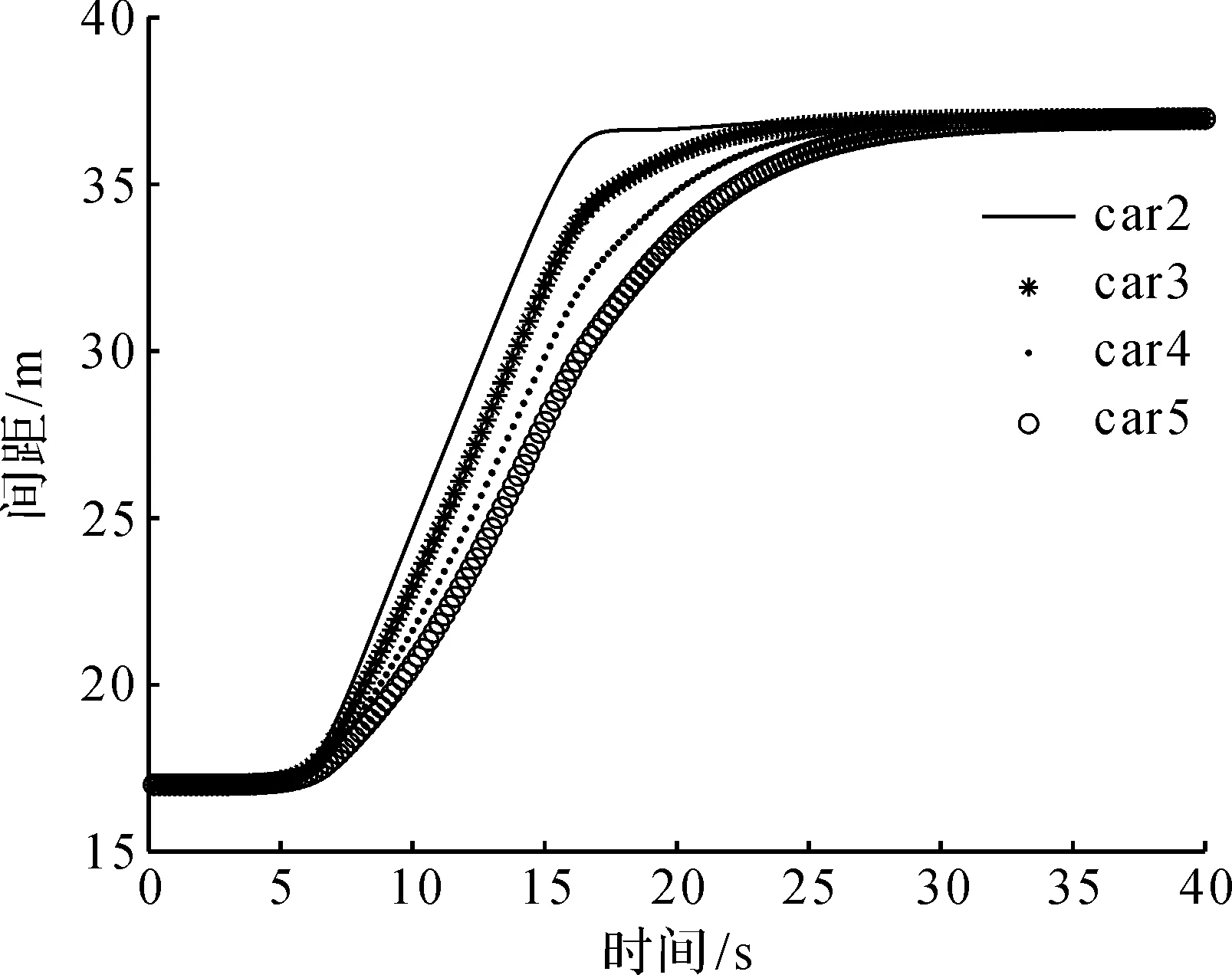
圖4 工況一車輛間距曲線Fig.4 Spacing profiles of vehicles in scenario 1
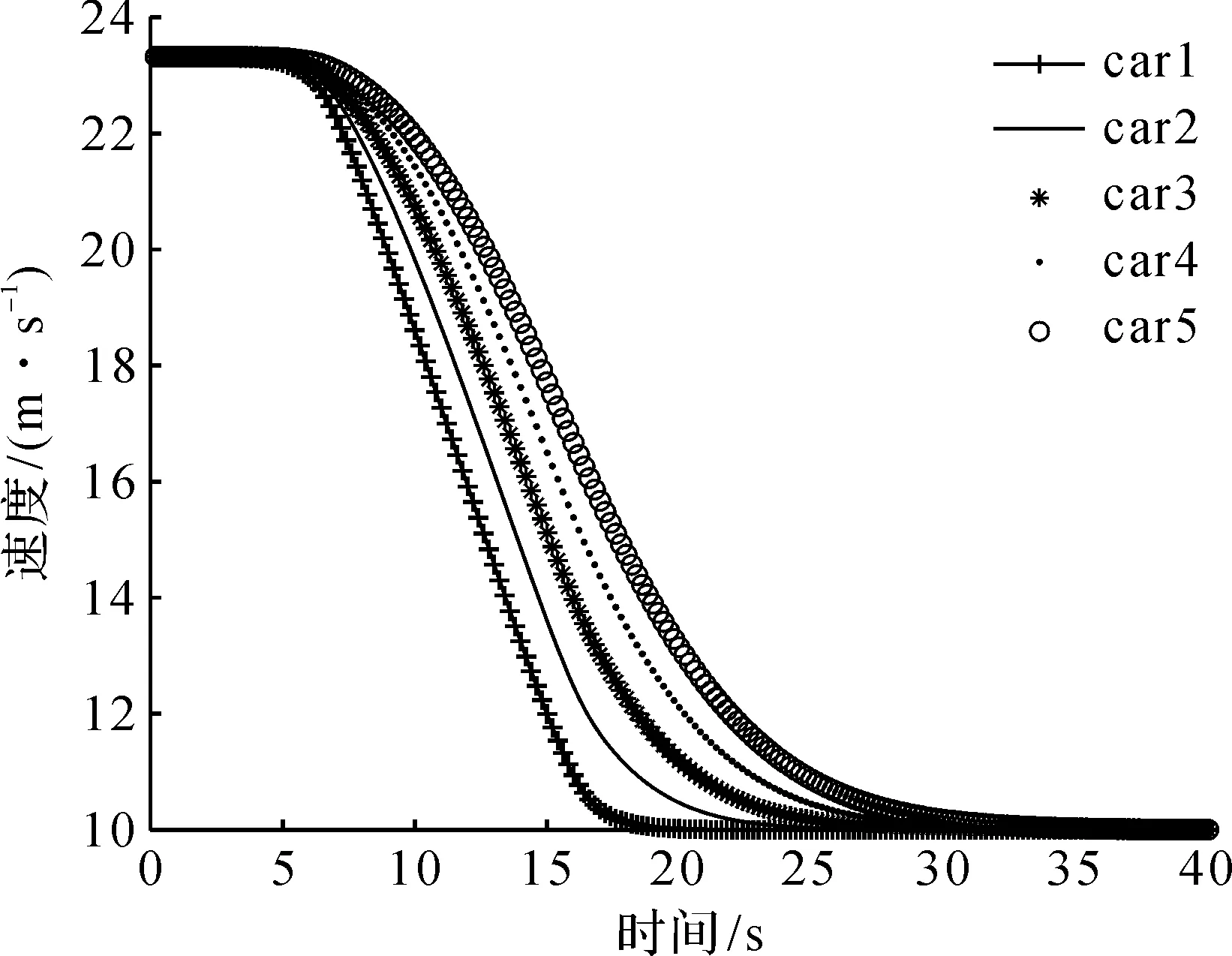
圖5 工況二車輛速度曲線Fig.5 Velocity profiles of vehicles in scenario 2
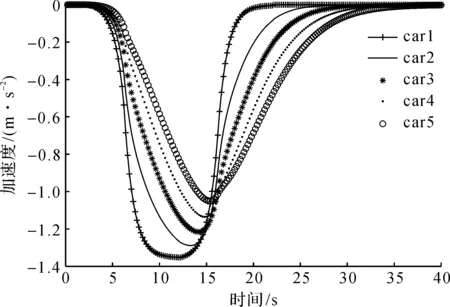
圖6 工況二車輛加速度曲線Fig.6 Acceleration profiles of vehicles in scenario 2
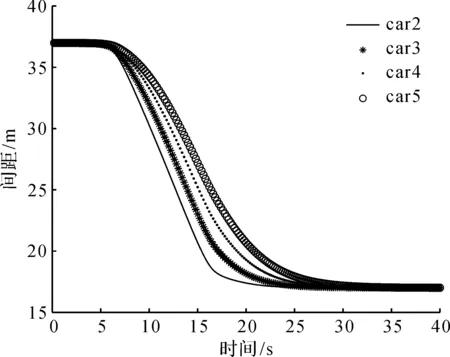
圖7 工況二車輛間距曲線Fig.7 Spacing profiles of vehicles in scenario 2
圖2,5為兩種工況下各車輛的速度變化曲線,后車速度均隨前車速度的變化而變化,在速度跟蹤的過程中,沒有出現(xiàn)超調(diào)現(xiàn)象,均能快速平滑地達到期望速度,與頭車速度保持一致,完成巡航目標,且同時滿足弦穩(wěn)定條件。圖3,6為兩種工況下各車輛的加速度變化曲線,頭車在2 s時開始做變加速運動,過程中沒有急加速和急減速的情況,后車在跟車過程中,加速度變化幅度均比前車小,在車隊巡航過程中可提高乘客乘坐的舒適性。圖4,7為兩種工況下各車輛間的車間距變化曲線,顯然,各車輛間的距離能夠隨著頭車速度的變化而快速平滑地到達理想車間距,過程中沒有出現(xiàn)超調(diào)現(xiàn)象,保證了車隊巡航過程中的安全性,且滿足弦穩(wěn)定條件。
對比傳統(tǒng)模型預(yù)測控制和階梯式模型預(yù)測控制作用下協(xié)同預(yù)測巡航算法的單步優(yōu)化平均計算時間,其中程序運行的計算機平臺為便攜式計算機;處理器為Inter? Core(TM) i3-3217U CPU 1.80 GHz;安裝內(nèi)存為8 GB;操作系統(tǒng)為Windows 10。為了減少偶然性情況的發(fā)生,在相同的運行環(huán)境下,采取不同預(yù)測步長,對工況一和工況二分別進行了10 次仿真,計算單步優(yōu)化的平均時間,結(jié)果如表2所示。由表2可知:預(yù)測步長越長,筆者提出的MPC算法對計算量的降低程度越明顯,在預(yù)測時域為20的情況下,筆者提出的MPC算法的單步優(yōu)化平均計算時間比傳統(tǒng)模型預(yù)測控制方法降低46.15%,有效降低了預(yù)測巡航控制算法在線求解最優(yōu)值的計算量,同時,平均計算時間遠小于采樣時間,滿足行駛過程中對汽車的快速性要求。
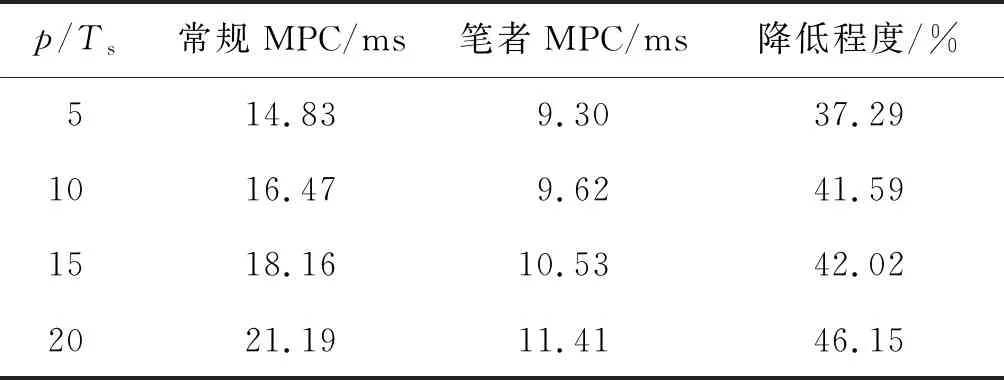
表2 單次平均計算時間Table 2 Average computation time at one time
4 結(jié) 論
基于網(wǎng)聯(lián)條件下車與車之間能夠?qū)崿F(xiàn)短程通信的特點,設(shè)計了一種基于階梯式控制策略的協(xié)同式預(yù)測巡航控制算法,實現(xiàn)了網(wǎng)聯(lián)異質(zhì)車輛隊列的協(xié)同巡航控制。該算法充分考慮了車輛在行駛過程中的跟蹤性能、經(jīng)濟性能和舒適性能等性能指標和系統(tǒng)約束條件,預(yù)先規(guī)劃未來時刻的控制輸入增量,將多變量優(yōu)化問題轉(zhuǎn)化為單變量優(yōu)化問題,在實現(xiàn)車輛隊列協(xié)同控制的同時有效降低了算法的在線計算量,仿真實驗驗證了所提算法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
