單鏡頭無人機在農房測量中的應用及精度驗證
2020-12-05 01:55:18張艷明楊永崇郭嵐王益展
遙感信息 2020年5期
張艷明,楊永崇,郭嵐,王益展
(西安科技大學 測繪科學與技術學院,西安 710000)
0 引言
傳統大比例(1∶500、1∶1 000、1∶2 000)地形圖測量主要采用全野外測繪的方法,采集要素多、精度高,資金和時間消耗大。近年來,隨著傾斜攝影測量技術的發展,無人機傾斜攝影已基本取代傳統人工全野外測繪,成為小區域大比例尺測圖的主流方式。但傳統傾斜攝影測量一直沒有突破5 cm點位中誤差要求,這就限制了無人機在高精度地籍測量項目中的應用,特別是對于廣泛使用的單鏡頭無人機,更是限制了其發展。
集體土地(含宅基地)使用權及農房所有權不動產調查測繪(簡稱農房測量)是當前測繪技術應用最廣泛的領域之一。傳統農房測量一般采用全野外測繪技術的測量方式,采用全站儀+GPS+鋼尺相結合的方法[1]。此方法雖然精度高,但具有一定的局限性,作業效率低、成本高、作業時間長[2]。因此,傾斜攝影技術廣泛應用于農房測量之中。對于高精度農房的測量,也已出現不少滿足規范要求的五鏡頭無人機的研究,但是對于大多數企業來說,無法承擔五鏡頭的高額費用。
1 無人機傾斜攝影測量的理論分析
無人機傾斜攝影的飛行高度是航線設計的基礎。航攝高度需要根據地面分辨率,然后結合傾斜相機的性能,其表達如式(1)所示。
H=f×GSD/α
(1)
式中:H為航攝高度,單位為m;f為鏡頭焦距,單位為mm;α為像元尺寸,單位為mm;GSD為地面分辨率,單位為m[3-4]。對于本次實驗,使用的無人機為大疆精靈4。無人機焦距為2.8 mm。農房測量所需要的地面分辨率為5 cm,像元尺寸為0.002 4 mm。通過計算可知,航高為58.3 m。結合實驗區域實地情況,本次實驗航高設置為60 m。
無人機傾斜攝影規范規定,航向重疊度一般應為60%~80%,最小不小于 53%;旁向重疊度一般應為15%~60%,最小不小于8%。在無人機傾斜攝影時,旁向重疊度是明顯不夠的[4-6]。研究相關結論可知,對于一個點,不同角度的拍攝照片越多其精度越高。本次實驗通過理論分析再考慮單鏡頭的效果,航向與旁向重疊度都設置為80%。
控制測量是為了保證空三的精度、確定地物目標在空間中的絕對位置[4],因此,像控點的布設是至關重要的。在大比例尺項目的生產過程中,五鏡頭無人機本身自帶高精度POS系統輔助,可適當減少控制點的數量, 按照1.5 km間距布設控制點[7]。相反,單鏡頭無人機的POS數據精度較低。因此,為提高實驗數據的精度,每平方千米布設20個左右的像控點和檢查點。像控點如果布設太密集,可能會耗時耗力;相反布設太稀疏,會影響其精度。傾斜攝影技術相對于傳統攝影技術在影像重疊度上要求更高。無人機通常采用 GPS 定位模式,自身帶有 POS 數據,對確定影像間的相對位置作用明顯,可以提高空三計算的準確度[4]。
因此,結合相關原理,分析計算得出要滿足農房測量5 cm精度,則必須滿足以下有關參數。無人機參數設置如表1所示。
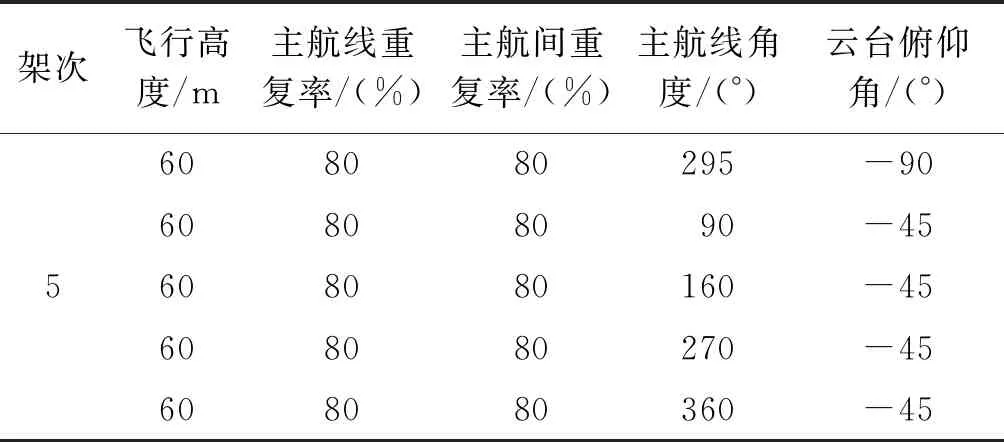
表1 無人機攝影參數
2 實驗驗證
2.1 全野外數據采集
本次實驗主要在蘭州市皋蘭縣砂崗村進行。該地區地勢平坦、無復雜地形,建筑物分布均勻、植被較少,多數為單層房屋,適合實驗的進行。實驗時間為上午10點到下午3點。無人機飛行速度為20 m/s,續航時間為28 min。天氣晴朗無云,有微風可能會造成精度的降低。
由于像控點的布設位置以及像控點的精度對模型的精度起著至關重要的作用,因此,在布設像控點時,依據整個航線區域來選擇布設。采用格網布設方法。首先,整個區域的四角必須布設像控點,保證周邊的重疊度;其次,在內部布設時,應盡量選擇地勢平坦且無周圍無明顯遮擋物的地區均勻布設,像控點的點位標志必須清晰明了。出于對本次實驗的檢查點布設,因此,檢查點選擇一些房屋的角點以及一些墻角點。結合實際區域布設像控點13個,檢查點28個,分布情況如圖1所示。

圖1 所布設像控點位置
2.2 數據采集
通過對相片進行預處理,對獲取的傾斜影像數據利用Smart3DCapture軟件進行三維建模[8-10],進行空三加密計算,最后形成高精度的三維模型(圖2)。

圖2 三維模型示意圖
最終計算的空三加密精為:Mxy=0.054 m,Mz=0.014 m,滿足《中華人民共和國國家標準1∶500、1∶ 1 000、1∶2 000地形圖航空攝影測量內業規范(GB/T 7930—2008) 》的要求[11-12]。對于空三加密,像控點測量的精度起到很大的作用。像控點是加密測量的基礎和定向的依據,高精度的像控點能有效控制加密點的誤差累計和傳輸[13]。因此,外業人員在選擇像控點的時候必須選擇清晰、明顯的位置,內業人員在進行刺點的過程中,認真細心,充分利用框標對像控點進行準確的定位以便減少誤差的累計。
將建立的三維模型導入EPS中,分別通過不同的人進行農房的裸眼采集,得到二維平面圖(圖3)。
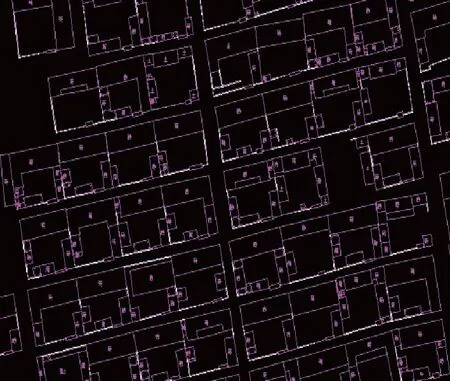
圖3 二維平面圖
經過多人采集分析精度得知,在EPS采集過程中應注意以下幾點。
1)采集時模型墻面有變形、凹凸,采集點不同導致誤差,或采集點分別在墻面和窗戶上導致誤差(此房屋窗戶與墻面屬于同一平面,但精確的坐標有誤差)。應將模型旋轉到相對清晰的角度,尋找相對變形不嚴重、平滑的地方進行采集。
2)由于房檐有一定的高度,采集點在房檐上檐和下檐導致高程誤差較大。作業開始之前應確定好此類房屋的高程定點標準,按統一標準進行數據采集。
3)磚房高程誤差產生原因為磚房頂是有坡度的房頂,每排瓦片高程不同,采集點稍微有偏差就導致高程誤差。此類房屋多為五點房方法進行繪制,X坐標取決于第一個采集點和第二個采集點,采集點取在房頂和側墻就會差一個磚塊厚度,從而導致偏差。應該對磚房進行實物觀察,確定一個采集點,以保證以后作業的精確度。
因此,在EPS采集過程中必須仔細研究模型,以便滿足精度要求。
2.3 精度分析
為了保證農房的精度要求,本實驗選取了28個檢測點作精度對比。通過對無人機傾斜攝影測量采集后的坐標與實地采集的坐標進行差值計算,分別得到X與Y的限差如表2所示。
通過分析,有1個超限不滿足精度要求,故對其余檢查點進行分析,并繪制出直方圖與正態分布曲線圖(圖4、圖5)。
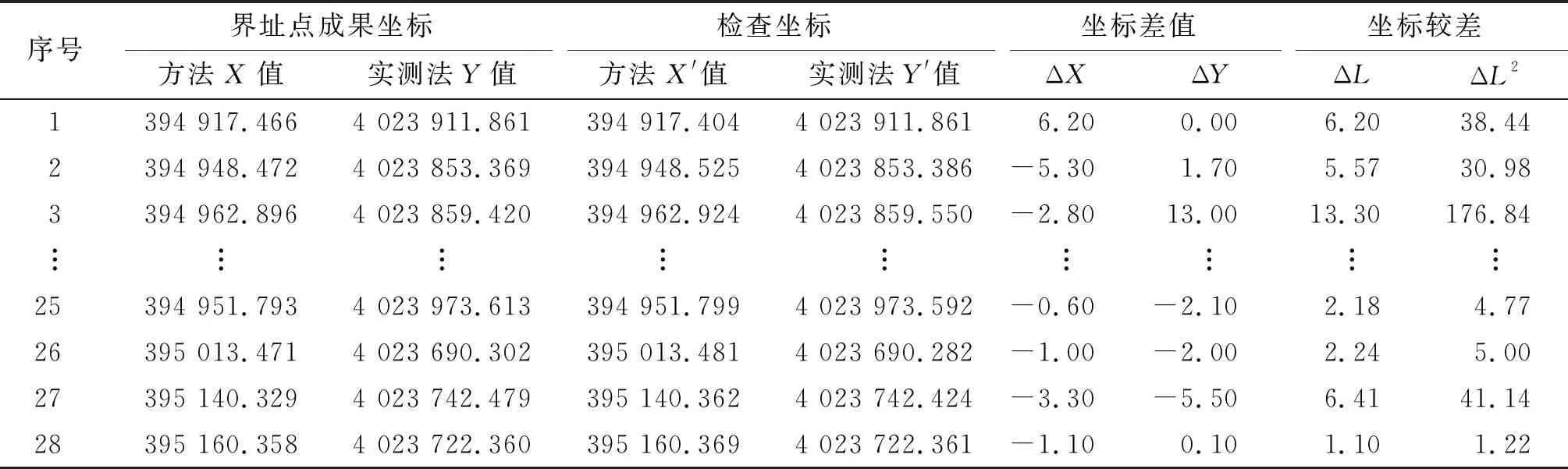
表2 誤差統計表
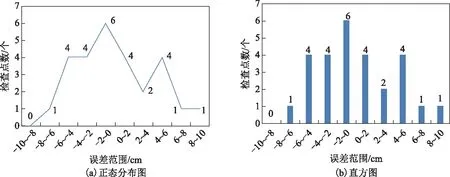
圖4 X軸誤差分布圖
通過分析圖4和圖5可知,X軸方向的誤差范圍為-8~10 cm之間,Y軸方向的誤差范圍為-8~8 cm之間,充分體現偶然誤差的規律。X軸方向的誤差主要分布在-6~6 cm之間,總共占有24個檢查點,占總數的88.89%;而誤差分布在-8~-6 cm、6~10 cm之間的共3個檢查點,占總數的11.11%。Y軸方向的誤差主要分布在-4~6 cm之間,總共占有25個檢查點,占總數的92.6%;而誤差分布在-6~-4 cm、6~8 cm之間的共2個檢查點,占總數的7.4%。這充分體現了誤差具有集中性的體征。而且X、Y軸的誤差分布均符合偶然誤差的分布規律[14],滿足要求。因此,這27個檢查點滿足要求,可進行更深層次的研究。
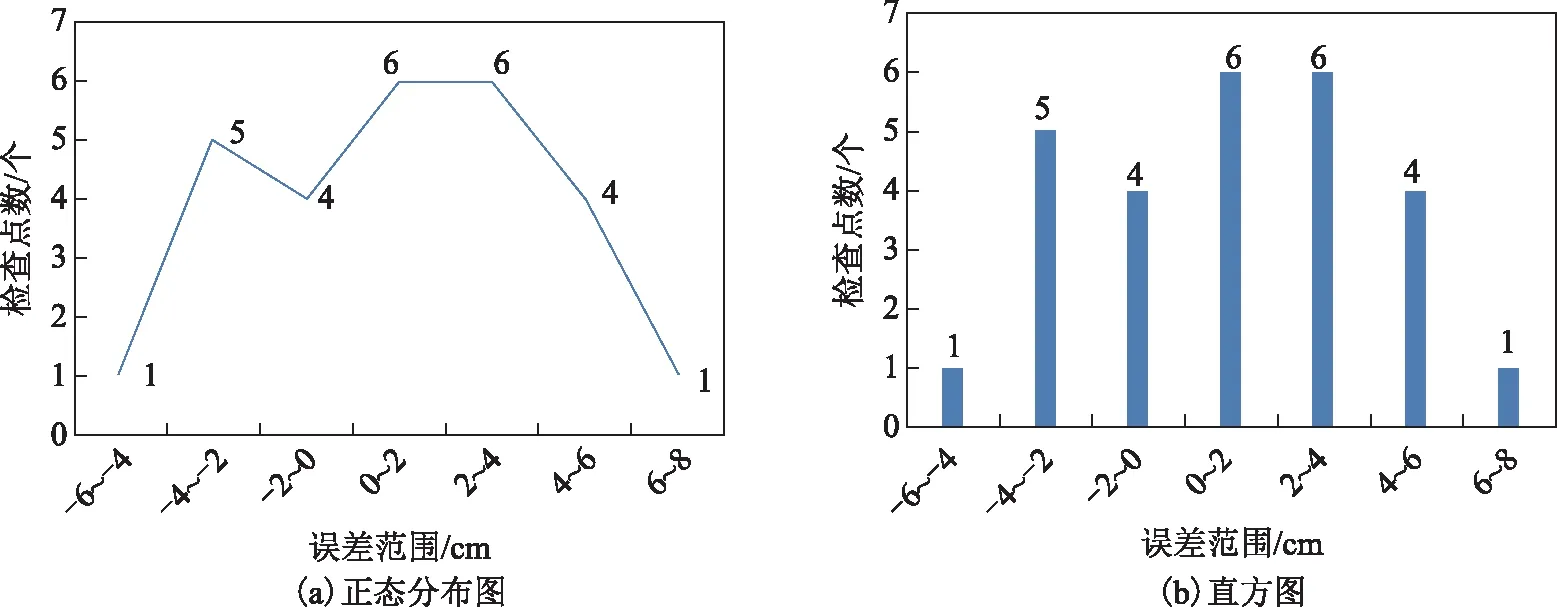
圖5 Y軸誤差分布圖
對各個界址點進行點位高精度及等精度中誤差計算可知,房屋界址點的中誤差為4.12 cm,小于中誤差5 cm[15],故滿足國家規范所要求的精度。因此,單鏡頭無人機可應用于小范圍高精度的農房測量實踐中。
3 結束語
本文主要通過嘗試單鏡頭無人機模擬五鏡頭進行農房測量實驗,以砂崗村為例,通過理論分析研究無人機在農房測量中的技術應用、規范流程設計方案,經過實驗驗證得出,單鏡頭無人機可以滿足農房測量的精度要求,符合國家規范標準,也極大提高了工作效率、節省了大量人力、物力等資源。這為單鏡頭無人機在農房測量中的使用提供了一個技術參考。具體結論如下。
1)單鏡頭無人機在飛行高度為60 m,旁向重疊度和航向重疊度設置為80%、80%,則可滿足農房測量的規范要求。
2)通過對理論的分析可知,在農房測量中,無人機的高度、重疊度的設置以及像控點的布設嚴格按照相關理論設置,并結合實際情況分析處理,這對無人機傾斜攝影測量技術有著關鍵作用。
3)通過對數據以及進行精度分析可知,界址點中誤差為4.12 cm,小于中誤差5 cm,滿足國家規范精度要求。
4)單鏡頭無人機在農房測量中具有成本低、數據量小以及處理簡單等優勢,在小范圍測量區域可以推廣使用。相比較大規模、大面積測量區域,單鏡頭無人機耗時較長、精度較低,不建議采用。因此,本文為小范圍區域的農房測量提供技術參考。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年18期)2018-11-14 01:48:24
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
山東工業技術(2016年15期)2016-12-01 05:31:22
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
