具有視覺識別能力的雙輪機器人設計
2020-12-06 10:48:06錢春陽許鵬
河南科技 2020年29期
錢春陽 許鵬


摘 要:為達到使雙輪機器人身體平衡的目的,本文基于模糊理論,設計出一款具有視覺識別能力的雙輪機器人。其間利用PDA通過網絡方式監控機器人,以便任意控制二輪機器人前進、后退及左右轉向,同時依靠主動式自我平衡控制器的作用,使機器人保持身體平衡而不倒。
關鍵詞:視覺識別;機器人;系統設計;雙輪機器人
中圖分類號:TP242文獻標識碼:A文章編號:1003-5168(2020)29-0052-03
Abstract: In order to achieve the purpose of balancing the body of the two-wheeled robot, this paper designed a two-wheeled robot with visual identity ability based on fuzzy theory. In the meantime, the PDA is used to monitor the robot through the network, so as to control the two-wheeled robot to move forward, backward, and turn left and right, at the same time, relying on the function of the active self-balancing controller, the robot can maintain the balance of the body without falling.
Keywords: visual identity;robot;system design;two-wheeled robot
近年來,半導體行業高速發展,加快了機器人時代的來臨,為了滿足人們的多樣需求,各種不同功能的機器人應運而生;無論是生產制造、家庭娛樂,還是環境安全維護、外層空間探險等,機器人都扮演著舉足輕重的角色[1-3]。因此,世界各國對機器人的研發可以說是不遺余力[4-5],比如,日本SONY的機器狗AIBO、HONDA人形機器人以及美國著名大學Massachusetts Institute of Technology(MIT)所發展的各類仿生物行走機器人等,都一再打破了技術上的限制與眾人的想象,展現了人類的智慧與巧思。鑒于此,筆者便產生了自行研發一個機器人的構想。
本研究采用的原始動機來自國外發名家Kamen所發明的Segway雙輪電動滑板車,其具有模仿人體平衡感的功能,可以自動平衡并保持直立。因此,筆者便利用此概念來達到使雙輪機器人身體平衡的目的。為達此目的,本研究必須設計一個主動式平衡控制器,利用傳統倒單擺控制的概念,并考慮身體與輪子的相對角度與角速度關系,將其當作控制變量,主動控制兩輪的轉速與轉向,使身體保持直立并且能自由轉向、前進、后退[6-7]。其間利用模糊平衡控制器,有效地達成多項復雜任務,如兩輪機器人平衡控制、人機接口的親和力提升、無線影像傳輸系統構建。同時,由于設計了視覺傳感器,因此其也具有初步的感測外界能力。
1 設計方法
下面首先說明整個控制平臺的運動模式。機器人身體部分以輪軸為中心做前后擺動,若以車身垂直地面為0°,則車身可擺動的范圍為-90°~+90°,如圖1所示。
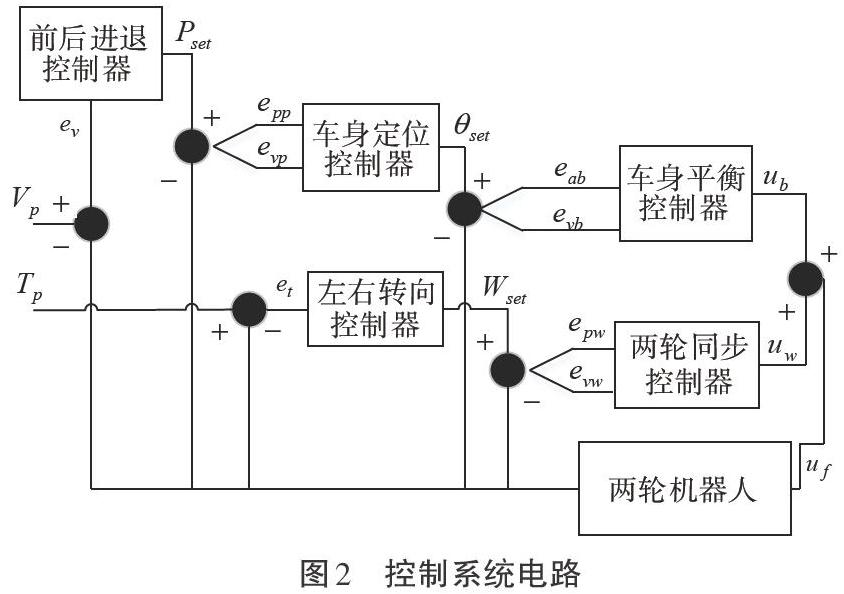
了解受控平臺的運動模式、行動決策后,在要求系統的反應速度快及控制方法簡單的前提下,為了達到兩輪機器人能行動自如的目的,本研究設計出三個控制器,其分別為平衡控制器、定位控制器及兩輪同步控制器。平衡控制器是以車身傾斜的角度(eab)及角速度(evb)為輸入,計算出適當的馬達出力值(ub)來追回車身的重心。定位控制器用來克服車身為了保持直立而偏離定位點的情況,其輸入是輪子轉動的位置(epp)及速度(evp),輸出為偏向角([θset])。兩輪同步控制器則用于修正兩輪因馬達特性不一致而產生的轉動量誤差,兩個輸入分別為左右輪位置差值(epw)及差值變化量(evw),輸出為馬達出力補償值(uw),為了使得雙輪車能前進后退及左右轉向,本研究設計了前進后退控制器及左右轉向控制器,分別通過更改車身定位點參數(Vp)及兩輪位置差值參數(Tp)來影響雙輪車的行為。雙輪機器人控制系統的電路如圖2所示。
2 系統架構
一般而言,自走車可歸為機器人一類。機器人可以說是最佳系統整合的象征,也是本研究最終所要達成的目標。而以移動方式來說,機器人除了以車輪帶動外,還有其他許多不同的形式,例如,以“足”為移動機構的步行機器人,常見有六足機器人、四足機器人,另外甚至有雙足機器人。整體來說,步行機器人的行進速度較慢,但可以應用在較復雜的地形,如凹凸不平的路面或是跨越階梯。至于車形機器人則有移動靈活的優勢,但通常只適用于平坦的路面。另外,尚有配備各種大小吸盤及飛行機構的攀墻機器人。
本研究以模糊理論為基礎,設計出一款具有視覺識別能力的雙輪機器人。其間利用PDA通過網絡方式監控機器人,任意控制二輪機器人前進、后退及左右轉向,同時依靠主動式自我平衡控制器的作用,使機器人保持身體平衡而不倒。主要目標是設計一個具有自我維持平衡能力的雙輪機器人,使其可行駛在傾斜不水平的地形上。最后可將車上之數字影像數據及車子的速度、角速度等數據經由網絡傳送,將其數據用響應圖表現出來,而通過人機接口,人們可以任意控制二輪機器人前進、后退及左右轉向。
3 系統設計
系統的硬件電路設計主要包括直流馬達、TA8429H電機驅動電路、光耦合保護電路PC817、PWM產生電路8254、8255可編程并行I/O接口芯片、主控制芯片W78E58B、擴充32K SDRAM、信號電壓轉換接口、外圍信號處理芯片W78E58B、串行服務器GW-21、譯碼電路HCTL2020、取樣電路ADC0804、光編碼器、濾波電路OPA2340、傾角傳感器、角速度陀螺儀、RF接收電路NT-R03A以及單片機AT89 C2051,如圖3所示。
人們可以通過無線局域網或有線通信介質將雙輪機器人產生的數據傳送到遠程監控平臺,遠程監控平臺可實時監控機器人的運動狀態,也可以向機器人發送指令使機器人按照要求執行任務。同時,可以通過遙控器命令雙輪機器人執行相應操作,遙控裝置及供電系統設計如圖4所示。
為使雙輪機器人具有視覺識別功能,本研究設計了實時視覺服務追蹤系統。該系統由影像處理單元和軌跡運算單元組成。影像處理單元的主要功能是對攝影機拍攝的連續影像進行移動目標物的分割,也就是將移動目標物快速偵測出來。本研究采用背景相減法偵測移動目標物,此方法的運算量較小,可做到即時移動目標物偵測。而軌跡運算單元的主要功能是明確影像處理單元中找出的目標物的部分運動軌跡,將目標物的運動軌跡數據代入基于模糊理論的類神經網絡設計的動態方程式中,利用類神經網絡本身具有的數據擬合特性來估測目標對象的運動軌跡,作為機器人即時響應動作的依據。
4 結論
為達到使雙輪機器人身體平衡的目的,本文利用PDA通過網絡方式監控機器人,任意控制二輪機器人前進、后退及左右轉向,同時依靠主動式自我平衡控制器的作用,使機器保持身體平衡而不倒。為使雙輪機器人具有視覺識別功能,本研究設計了實時視覺服務追蹤系統。
參考文獻:
[1]翟國棟,張文濤,岳中文,等.基于雙目視覺技術的煤礦救援機器人研究進展[J].煤炭科學技術,2020(7):1-13.
[2]林煜生.圖像透視校正在移動機器人視覺識別中的應用[J].科技創新與應用,2020(18):28-30.
[3]范昭君.智能控制在自動撿球機器人中的應用[J].自動化技術與應用,2020(5):67-71.
[4]馬宏偉,王巖,楊林.煤礦井下移動機器人深度視覺自主導航研究[J].煤炭學報,2020(6):2193-2206.
[5]郭軍.基于機器視覺的機器人工件定位系統研究及實際應用[J].科學技術創新,2020(14):103-104.
[6]韓江云,虞媛媛,郭柴琪,等.基于視覺的自主巡邏機器人技術研究[J].科學技術創新,2020(14):178-179.
[7]季云峰,任杰,施之皓.乒乓球機器人視覺系統的實時跟蹤[J].上海體育學院學報,2020(6):70-75.
