基于空三解算技術(shù)的樹障測量技術(shù)研究
2020-12-08 03:38:04劉漢君吳錦秋林江濤
計(jì)算機(jī)測量與控制 2020年11期
關(guān)鍵詞:測量
劉漢君,吳錦秋,林江濤
(廣東電網(wǎng)有限責(zé)任公司 中山供電局,廣東 中山 528400)
0 引言
樹木障礙的隱患是指架空電力線與樹木之間的距離小于最小安全距離時(shí)可能發(fā)生的單相接地,電弧短路,斷線等故障,以及其他可能發(fā)生的故障。法規(guī)規(guī)定的最大風(fēng)偏或最大下垂距離;這樣的故障將導(dǎo)致一系列安全事故,例如短路跳閘,大面積停電和森林火災(zāi)等問題的出現(xiàn)[1-3]。國內(nèi)外都有許多傳輸線障礙的事故發(fā)生。2006年,由于電線與樹木的樹枝纏繞在一起,馬來西亞東部發(fā)生了大范圍的電源故障[4]。據(jù)統(tǒng)計(jì),近年來廣東省電網(wǎng)因樹籬引起的絆倒事故占絆倒事故總數(shù)的46%。樹木障礙的問題已成為維護(hù)和保證電網(wǎng)安全穩(wěn)定運(yùn)行的主要隱患。為了避免超高樹可能對電網(wǎng)造成的危害,有必要及時(shí)發(fā)現(xiàn)并消除樹障礙的這種隱患。傳輸線,塔和其他單元始終暴露在周圍環(huán)境中,小巷中的尤其是樹木很可能成為對其的威脅。如果不及時(shí)刮除,樹與電線之間的距離將破壞文件中標(biāo)準(zhǔn)的安全要求。在這種情況下,將導(dǎo)致傳動系統(tǒng)停止運(yùn)轉(zhuǎn),從而影響正常工作。因此,測量傳輸線與樹木之間的距離并及時(shí)清除樹木障礙的隱患至關(guān)重要。基于問題的嚴(yán)重程度,很多研究學(xué)者結(jié)合目前科技探究了多種測量樹障的方法。
國內(nèi)外也進(jìn)行過很多關(guān)于樹障測量的研究,并且也取得了一定成果。現(xiàn)將情況匯總。2009年,Yoshihiro Kobayashi等[5]介紹了一種創(chuàng)新概念,利用多光譜立體衛(wèi)星對圖像沿著架空傳輸權(quán)識別危險(xiǎn)樹木和植物。會自動掃描右側(cè)的多光譜衛(wèi)星圖像,并分析每個(gè)像素的顏色(波長)。此掃描可識別健康的植被,其中可能包含會危害傳輸線的樹木。使用多光譜立體圖像,可以確定每個(gè)像素的高度,并計(jì)算與導(dǎo)體的距離。當(dāng)該距離小于導(dǎo)體周圍的危險(xiǎn)區(qū)域時(shí),則認(rèn)為識別出的物體或樹木會危害電線。2016年,Zhang W等人[6]提出了一種基于LiDAR的自動樹障預(yù)警方法。獲取走廊中傳輸線和其他類型物體的分類信息。然后,在相應(yīng)線段的極端天氣條件下模擬導(dǎo)體下垂和風(fēng)向偏航。為了提高計(jì)算效率,該方法基于DB-Scan將屬于樹型的點(diǎn)分成幾組。最后,通過計(jì)算電線與樹木之間的最小距離并結(jié)合樹木生長周期模型來實(shí)現(xiàn)預(yù)警。2018年,Chen Q等研究小組[7]提出了一種雙目視覺測距方法來測量輸電線路與樹木之間的距離。基于雙目視覺測距原理,使用標(biāo)記的棋盤格作為校準(zhǔn)板對雙目相機(jī)進(jìn)行校準(zhǔn)。然后,將SAD區(qū)域匹配算法應(yīng)用于預(yù)處理后的圖像,并獲得視差圖。最后,根據(jù)兩個(gè)目標(biāo)點(diǎn)的三維坐標(biāo)信息,可以得到樹與傳輸線之間的距離。2019年,Mao H.S.等團(tuán)隊(duì)[8]在Steger算法的基礎(chǔ)上,設(shè)計(jì)了一種自動檢測算法,可以自動提取架空電力線的中心線及其像素坐標(biāo)。根據(jù)雙目視覺原理,通過立體匹配算法分別獲得架空電力線和樹冠輪廓線的三維坐標(biāo),然后計(jì)算出樹障的值。
關(guān)于樹障測量的研究已有很多,鑒于以上研究,本文在相關(guān)算法的基礎(chǔ)上,設(shè)計(jì)了另一種計(jì)算樹障測量的相關(guān)研究,本文利用無人機(jī)的遙感數(shù)據(jù)進(jìn)行空中三角剖分,立體模型建立和基于MapMatrix軟件[9]的雙目立體視覺高度提取,然后獲得電線與樹冠之間的準(zhǔn)確而有效的測量,可以實(shí)現(xiàn)對傳輸線勢壘值的測量,并通過調(diào)整參數(shù),使得最終的測量誤差精度可以滿足測量樹木與輸電線路之間距離的需要,至今未有人將這一算法使用在樹障測量研究上,在一定程度上有所創(chuàng)新。這項(xiàng)研究不僅符合要求的安全距離,也具有高檢測效率,維護(hù)成本低,風(fēng)險(xiǎn)低,堅(jiān)固可操作性等優(yōu)點(diǎn)。
1 電線路對樹冠的距離限值
為了測量電線路與樹冠之間的距離,首先需要明確安全范圍。根據(jù)《架空輸電線路運(yùn)行規(guī)程》[10]中的相關(guān)規(guī)范,電線在其最大垂直弧度和最大風(fēng)力偏向時(shí)和樹冠之間的安全距離如表1所示。由圖可以看出,不同電壓下的最大垂直距離和最大風(fēng)偏時(shí)的安全距離是不一樣的。隨著電壓的增高,安全距離也在增大。
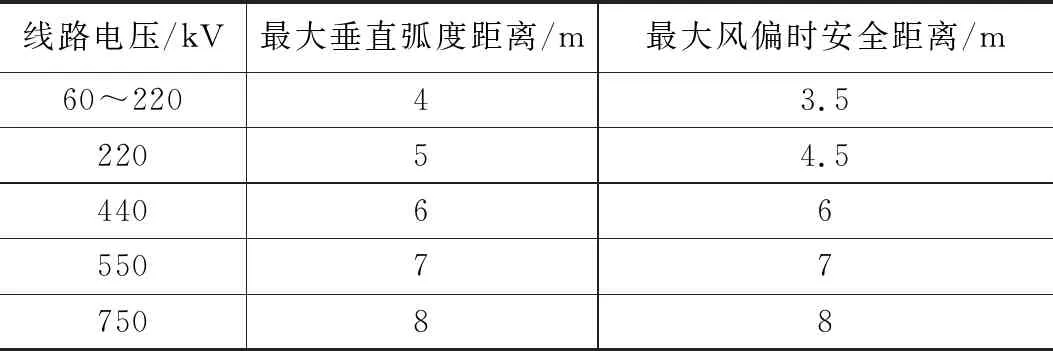
表1 輸電線在最大垂直弧度、最大風(fēng)偏時(shí)與樹冠之間的安全距離
根據(jù)表1所示的不同電壓下的不同安全距離,從而制定了相應(yīng)的樹障隱患等級,共分為三個(gè)隱患等級,分別為普通隱患、嚴(yán)重隱患、緊急隱患。表2給出了詳細(xì)的等級分類。
根據(jù)表2可以看出國家電網(wǎng)對于三個(gè)等級的安全距離歸類,依據(jù)表格內(nèi)容進(jìn)行樹障測量的研究具有現(xiàn)實(shí)意義。
2 基于空三解算的樹障測量
2.1 圖像測量原理
本研究使用無人機(jī)獲得高分辨率架空電力的可見光圖像采集物體。基于航空視覺開發(fā)軟件MapMatrix,一站式空中三角剖分和立體模型建立獲取的圖像[11]。電源線在電力走廊中的地面高度被提取,并且獲取樹冠與地面之間的高度,并對獲取的高度信息進(jìn)行評估和分析。在這項(xiàng)研究中, 無人機(jī)總共進(jìn)行了一次飛行,獲得的高分辨率無人機(jī)遙
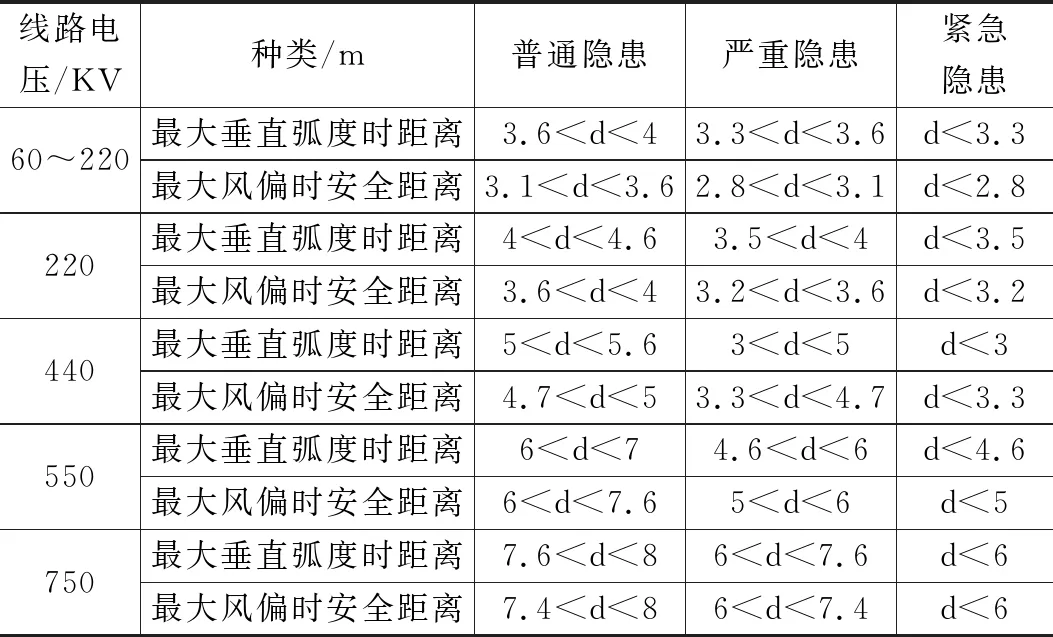
表2 輸電線在最大垂直弧度、最大風(fēng)偏時(shí)與
感圖像約為10平方千米,如圖1所示。在航拍過程中,海拔約為220米,圖像的地面分辨率約為5厘米/像素。 為了提高以后的數(shù)據(jù)質(zhì)量加工,航向重疊率和側(cè)面重疊度設(shè)置為75%。無人機(jī)航拍完成后,檢查航空攝影圖像數(shù)據(jù)所必需的,主要是檢查圖像重疊度,云霧度,航向角度和傾斜角度等。最終獲得相機(jī)參數(shù)數(shù)據(jù),部分POS數(shù)據(jù),圖像數(shù)據(jù)和控制點(diǎn)。
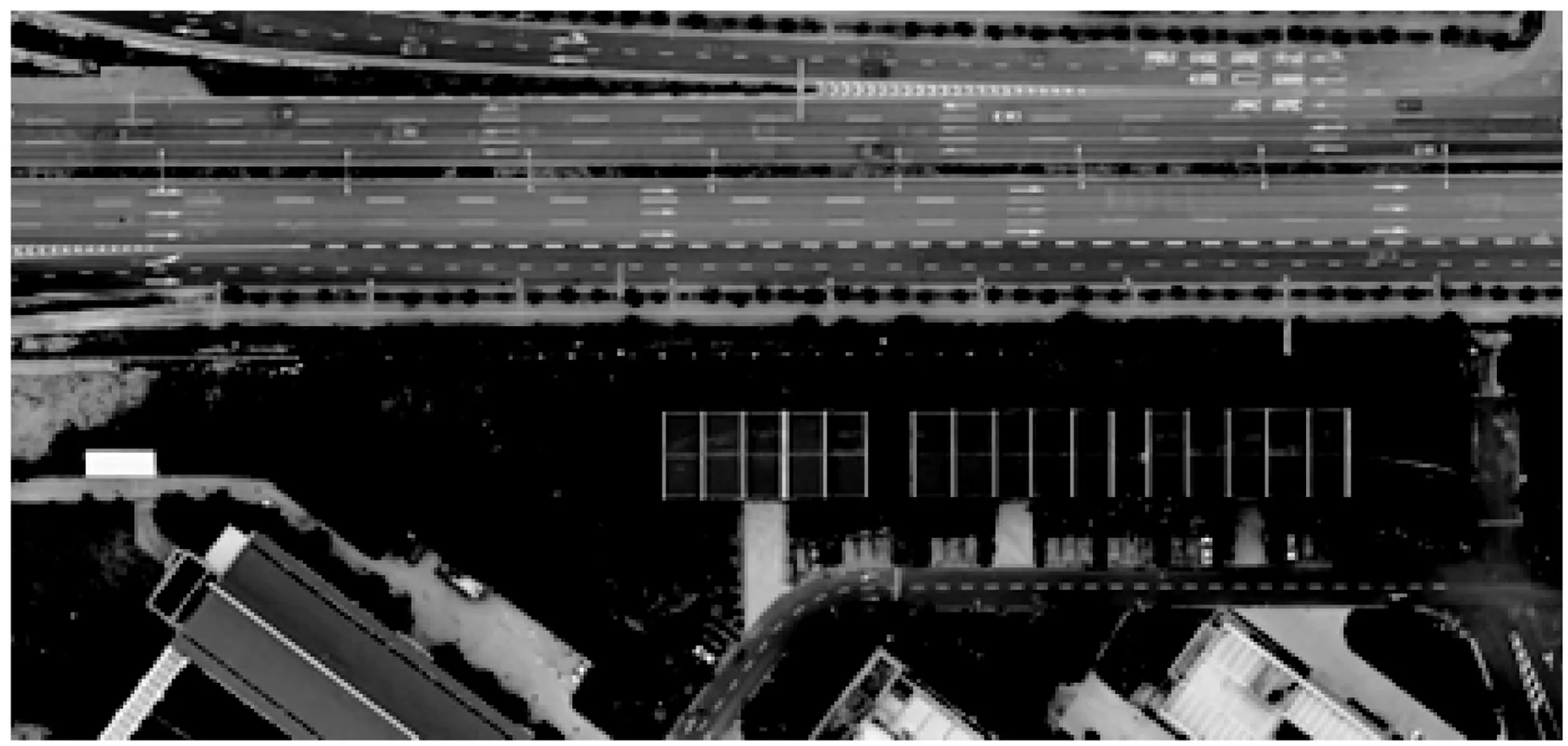
圖1 航拍面積圖

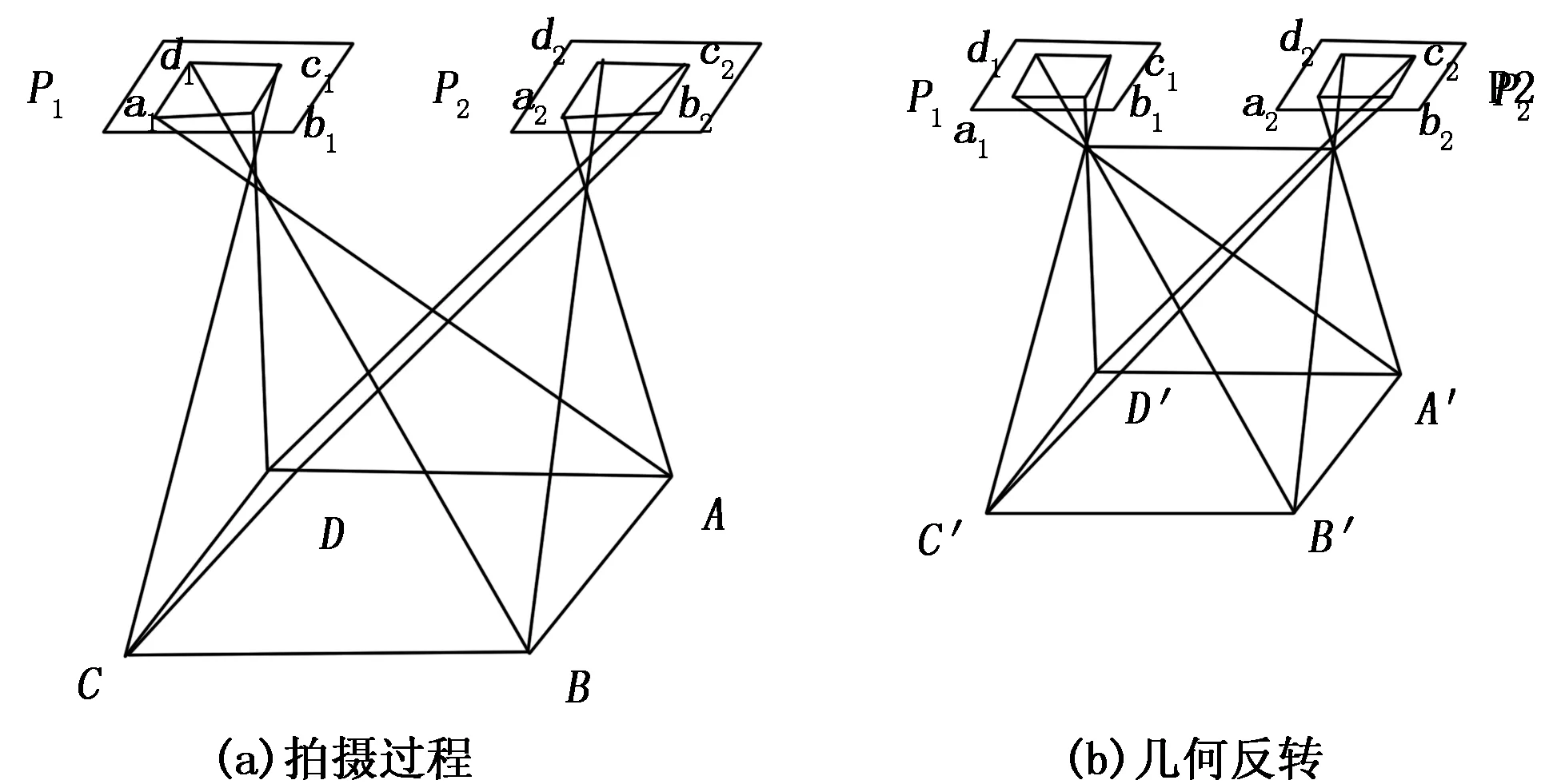
圖2 雙圖像立體映射原理
立體圖像的兩個(gè)圖像重疊范圍內(nèi)的任何地面點(diǎn)分別在兩個(gè)圖像上具有其同名圖像點(diǎn),并與相應(yīng)的攝影中心形成同名射線。同名的攝影射線彼此相交。因此,在攝影基線中,同名圖像點(diǎn)和地面點(diǎn)之間存在固定的幾何關(guān)系。為了對圖像對進(jìn)行立體映射,有必要重建與場相似的幾何模型,并符合比例尺和空間方向,如果可以恢復(fù)圖像對的內(nèi)外取向元素,則上述固有的幾何關(guān)系可以恢復(fù),因此可獲取3D重建和電力線高程點(diǎn)。
2.2 空三解算剖析
2.2.1 內(nèi)部方向
內(nèi)部方向是根據(jù)照片的幀標(biāo)記坐標(biāo)和相應(yīng)的照相機(jī)校準(zhǔn)參數(shù)恢復(fù)照片和照相機(jī)的相對位置,即建立照片坐標(biāo)系。在執(zhí)行內(nèi)部確定之前,必須設(shè)置圖像的掃描分辨率和相機(jī)參數(shù)。對于數(shù)字圖像,MapMatrix的HAT模塊可用于全自動內(nèi)部定向,這將同時(shí)自動刷新圖像的坐標(biāo)。執(zhí)行完后,藍(lán)色投影中心標(biāo)記將顯示在具有成功內(nèi)部定向的圖像中間,如圖3所示。對于膠片圖像,如果未進(jìn)行自動校準(zhǔn),則在執(zhí)行“自動內(nèi)部定向”操作后,在框架標(biāo)簽的中心,需要人工干預(yù)才能進(jìn)行內(nèi)部方向編輯校正[14-15]。
圖3 內(nèi)部定向結(jié)果
2.2.2 相對方向
當(dāng)兩個(gè)攝像機(jī)在同一地面上拾取一個(gè)立體聲對時(shí),任何一對立體聲對相同名稱的兩條光線在對象點(diǎn)處相交,即存在一種現(xiàn)象,即相同名稱的一對光線相交,如果保留兩個(gè)圖像,則相對位置和姿態(tài)關(guān)系不變,將兩個(gè)圖像移動,旋轉(zhuǎn)并更改基線長度,并且同名光線對的特征不改變[16]。分析方法的相對方向基于同名立體圖像對的內(nèi)部幾何關(guān)系。通過測得的圖像點(diǎn)坐標(biāo),解析計(jì)算出相對方位元素,建立與地面相似的立體模型,確定模型點(diǎn)的三維坐標(biāo)。相對方向與照片的絕對位置無關(guān),并且不需要地面控制點(diǎn)。相對定向的目的是建立三維模型。空三的操作過程主要取決于相對取向,其質(zhì)量直接影響絕對取向的結(jié)果,進(jìn)而影響立體效果。
2.2.3 連接點(diǎn)生成和篩選
連接點(diǎn)是用于連接相鄰模型的相同名稱的圖像點(diǎn)。連接點(diǎn)的地面坐標(biāo)是未知的,但是可以在兩個(gè)或多個(gè)圖像的重疊區(qū)域中進(jìn)行識別和測量。連接點(diǎn)還應(yīng)均勻分布在該區(qū)域的圖像上,最典型的是每個(gè)圖像9個(gè)連接點(diǎn)。在一個(gè)調(diào)查區(qū)域中,如果有60%的航向重疊和30%的側(cè)向重疊,則每個(gè)圖像上的9個(gè)連接點(diǎn)足以連接整個(gè)導(dǎo)航帶并獲得更高的精度。如圖4所示。
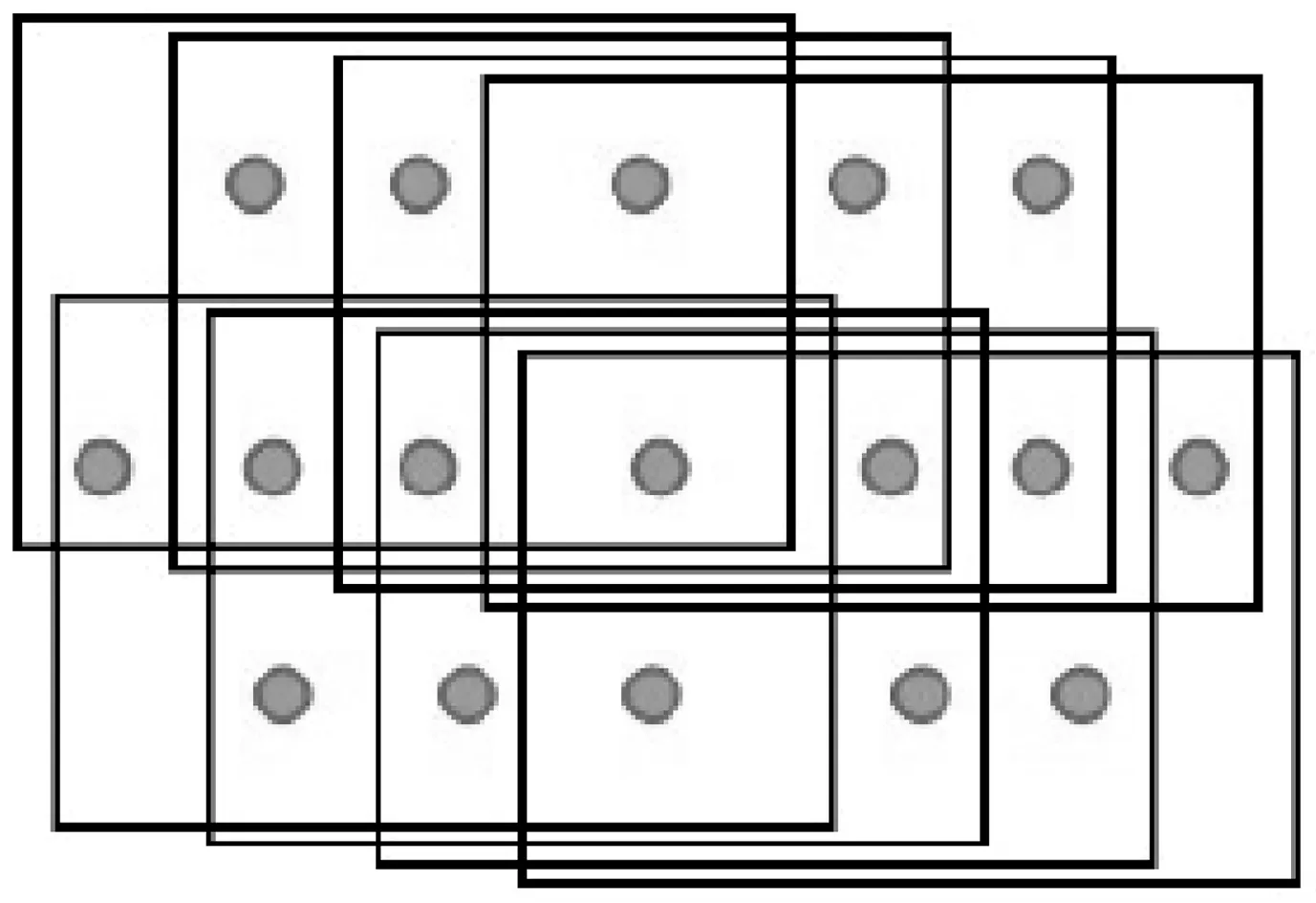
圖4 連接點(diǎn)的分布
根據(jù)導(dǎo)航帶的內(nèi)外方位元素,攝像機(jī)參數(shù),控制點(diǎn)等數(shù)據(jù),生成連接點(diǎn)后,需要對連接點(diǎn)的錯(cuò)誤點(diǎn)進(jìn)行過濾和去除,主要是消除重疊度小于2的點(diǎn)和綜合Max的總差值。刪除的點(diǎn)不參與無效的三位運(yùn)算,并不影響結(jié)果的準(zhǔn)確性。
2.2.4 調(diào)整計(jì)算
調(diào)整計(jì)算基于數(shù)學(xué)模型,使用現(xiàn)場測量的幾個(gè)控制點(diǎn),進(jìn)行攝影測量操作所需的所有控制點(diǎn)(稱為固定點(diǎn)或加密點(diǎn))的調(diào)整計(jì)算(加密)。每張照片的外部方向元素,飛機(jī)跑道方法,獨(dú)立模型方法是更常用的調(diào)整模型[17]。還根據(jù)加密區(qū)域進(jìn)行分類,可以分為單跑道方法和區(qū)域網(wǎng)絡(luò)方法。本研究中,PATB調(diào)整軟件用于調(diào)整計(jì)算。它使用理論上最嚴(yán)格的自檢波束調(diào)整算法,可以補(bǔ)償系統(tǒng)誤差。同時(shí),它增加了先進(jìn)實(shí)用的粗差檢測算法,因此可以通過有效的粗差檢測獲得高精度的調(diào)整結(jié)果。在自動生成連接點(diǎn)之后,可以在工程區(qū)域的四個(gè)角附近準(zhǔn)時(shí)插入幾個(gè)控制點(diǎn)(當(dāng)沒有POS信息時(shí),至少要有三個(gè)ID控制點(diǎn)),并且應(yīng)在盡可能多的相關(guān)圖像上進(jìn)行準(zhǔn)確標(biāo)記使用HAT模塊插入控制點(diǎn)時(shí)可以使用。插入控制點(diǎn)后,可以首先計(jì)算調(diào)整值以了解連接點(diǎn)的精度。如果調(diào)整是收斂的,則添加其他控制點(diǎn)很方便。控制點(diǎn)給定的值越小,表示的重量值越大,反之亦然。計(jì)算調(diào)整后,通常會編輯爭議點(diǎn),然后通常進(jìn)行調(diào)整計(jì)算,直到?jīng)]有明顯的爭議點(diǎn)的信息為止。另外,有必要在最后一次調(diào)整計(jì)算的功能中檢查“通過反演計(jì)算后驗(yàn)方差”中的“輸出后驗(yàn)方差”。同時(shí),如果出現(xiàn)“通過自動錯(cuò)誤檢測”的檢查,則可以不進(jìn)行檢查。在連接點(diǎn)沒有明顯的大錯(cuò)誤點(diǎn),并且可以確定控制點(diǎn)沒有問題。
2.3 數(shù)據(jù)處理
空中三角剖分完成后,MapMatrix可以輸出項(xiàng)目文件,在中打開創(chuàng)建的項(xiàng)目文件MapMatrix主頁,立體圖像對和DLG創(chuàng)建項(xiàng)目文件,并針對輸電線垂直弧度創(chuàng)建立體圖像對模型進(jìn)入DLG項(xiàng)目文件,并對樹障進(jìn)行分析。 數(shù)字化DLG項(xiàng)目文件以打開Feature One模塊,并將圖形比例設(shè)置為500。上文制作的模型用于提取輸電線路和樹冠之間的高度和地面特征。然后使用MapMatrix的Feature One模塊收集輸電線和樹障對象。危險(xiǎn)要素的高程點(diǎn)是要素的最高點(diǎn),以及每15m收集一次傳輸線。
3 實(shí)驗(yàn)結(jié)果
通過MapMatrix軟件進(jìn)行實(shí)驗(yàn)分析,并通過比對對本次實(shí)驗(yàn)進(jìn)行精度驗(yàn)證。對比試驗(yàn)是2016年,中國能源建設(shè)集團(tuán)在100 km范圍內(nèi),基于可見光影像的輸電線與樹冠之間安全距離的測量技術(shù)進(jìn)行研究,并結(jié)合了高精度的激光雷達(dá)對指定范圍進(jìn)行精度驗(yàn)證。由對比可知,本次實(shí)驗(yàn)所做出的輸電線與樹冠之間安全距離的測量滿足電線運(yùn)營和維護(hù)的工作要求。實(shí)驗(yàn)數(shù)據(jù)如表3所示。
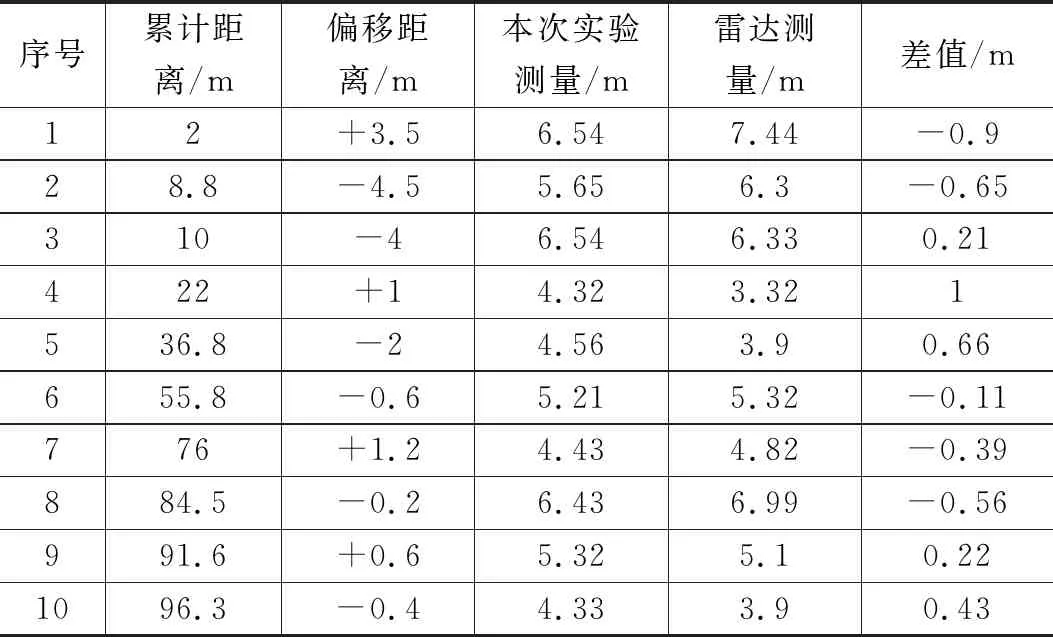
表3 實(shí)驗(yàn)數(shù)據(jù)距離差值
由于無人機(jī)圖像采集的靈活性,實(shí)時(shí)性和低成本等優(yōu)點(diǎn),無人機(jī)遙感在電力巡邏中的應(yīng)用越來越廣泛[18]。使用可見光影像進(jìn)行樹障測量之間的精度取決于很多因素,例如:影像質(zhì)量、連接點(diǎn)選取、空三解算法的數(shù)據(jù)讀取精度等都會對樹障測量產(chǎn)生影響。有效運(yùn)用空三解算方法測量樹障距離能夠提高精度不足的問題。
4 結(jié)束語
本文建立了基于空三解算技術(shù)的樹障測量技術(shù)研究,通過無人機(jī)圖像采集技術(shù)獲取了相關(guān)影像信息,提高了電力巡線的效率和質(zhì)量。本研究針對當(dāng)前電力線高度和樹冠高度的凈高進(jìn)行分析,分析了樹障安全距離,并對電力線風(fēng)險(xiǎn)進(jìn)行評估。這一研究有效避免了更多樹木障礙事故的發(fā)生,并且能夠保障工作人員以及小區(qū)環(huán)境的安全。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
