軌道交通移動裝備數字仿真平臺設計研究
2020-12-08 07:46:40馮瑞龍趙俊華
鐵路計算機應用 2020年11期
王 翔,周 超,馮瑞龍,趙俊華
(1. 北京經緯信息技術有限公司,北京 100081;2. 中國鐵道科學研究院集團有限公司 電子計算技術研究所,北京 100081)
軌道交通移動裝備是集多學科協同、集成、優化的高新產品。目前,在移動裝備的產品設計開發過程中仍存在多類問題:(1)確定部件級模型的關聯模型;(2)復雜系統仿真計算方法;(3)整體設計流程化、標準化;(4)多學科總體優化設計。隨著虛擬樣機技術以及仿真測試的發展,基于復雜系統下的多學科集成仿真平臺為軌道交通移動裝備的新一輪設計開發帶來了機遇。
軌道交通移動裝備動力學性能分析以及牽引控制系統優化設計是移動裝備總體設計中必不可少的環節[1]。在列車實際運行過程中,空氣動力學性能、系統動力學性能和牽引控制系統3 者亦是相互影響,存在一系列耦合作用,傳統的單一學科數字仿真方法已經無法滿足移動裝備關鍵技術的攻關及驗證。本文通過對軌道交通移動裝備動力學、牽引控制系統計算模型的研究建立了學科交互的邏輯關系,并創建能夠描述系統過程的關聯模型作為聯合仿真的理論依據;通過整體架構設計、子模塊定制、系統無縫集成和輕量化儲存的技術搭建聯合仿真平臺,所建平臺不僅具備復雜學科聯合分析的功能,亦可指導新產品的開發、推進現有產品的改進,為產品全生命周期提供數據支撐[2]。
1 聯合仿真算法研究
1.1 軌道交通移動裝備流—固聯合仿真研究
軌道交通移動裝備空氣動力學以及系統動力學性能分析是裝備設計研發過程中的重要組成,從實際運行的角度來說,兩者相互關聯。目前,對于兩者的耦合作用分析采用離線仿真的方法,通過對環境下氣動載荷的計算,以固定值加載的方式對移動裝備系統動力學性能進行分析評價。該方法忽略了裝備運行的實時性和同步性,無法反映出實質狀態[3]。
為節省計算資源且保證2 種求解器中的數據交互,本文通過耦合迭代的計算方法實現兩者的聯合仿真,利用嵌入式技術將移動裝備系統動力學計算程序和空氣動力學計算程序結合,采用線性插值的方式保證計算迭代的連續性,從而實現了聯合仿真的實時一致性,具體流程,如下圖1 所示。

圖1 流-固耦合仿真流程
為解決迭代過程中的計算發散問題,本文利用線性插值的方法提供,以避免迭代過程中相鄰時間段氣動載荷的激變。t時刻氣動載荷F修正計算公式如下:

式中,Fn為t時刻的氣動載荷;Fn?1為tn?1時刻的氣動載荷。
軌道交通移動裝備流?固聯合仿真計算方法由最初穩定流場作為迭代計算的起始網格,根據每個迭代步中邊界條件的變化情況自動完成網格更新,每次計算過程中的氣動載荷實時提供給系統動力學計算程序完成動力學性能的分析(具體表現為移動裝備的運行姿態),隨即反饋給空氣動力學計算程序完成迭代計算過程[4]。
1.2 軌道交通移動裝備系統動力學—運行控制聯合仿真研究
軌道交通移動裝備的運行控制主要表現為牽引、惰行和制動3 種方式,本文利用系統動力學軟件Simpack 及控制類軟件Simulink 聯合仿真,進行軌道交通不同運行控制下的建模與運行能力分析。
Simpack 軟件Wheel/Rail 模塊主要通過整體模型建立,輪軌接觸參數設置,子結構約束設定以及軌道譜選取的方式進行移動裝備動力學性能分析及評價[5],所建立的移動裝備系統動力學模型以函數形式輸出至Simulink 中,通過Simulink 自帶SIMAT 接口實現數據交互,從而實現聯合仿真,具體流程如下:
(1)軌道交通移動裝備系統動力學模型。依據車型信息建立輪對、轉向架、車體和懸掛系統等機械結構,通過鉸鏈建立關聯,設定約束以及作用載荷。
(2)系統動力學模型的輸入與輸出。SIMAT 接口作為兩類仿真數據交互的媒介,其優點是接口高效且能實時提供所有的幾何數據。系統動力學模型的輸出是指其對控制系統的變量傳輸,輸入則是控制系統對于動力學參數輸入的反饋,兩者形成閉環。
(3)控制系統模型。在Matlab 中創建控制系統結構框圖,既描述系統過程的傳遞函數模型,在已建立的輸入輸出信息封閉循環中用數據驅動建模實現與系統動力學模型的信息傳遞。
(4)采用交互的方式實現軌道交通移動裝備動力學?運動控制系統聯合仿真。
1.3 軌道交通移動裝備空氣動力學—運行控制聯合仿真研究
軌道交通移動裝備空氣動力學?運行控制聯合仿真主要研究對象為磁懸浮、真空管道載運工具等新型軌道交通移動裝備,用于處理移動裝備運動行為與氣動載荷之間耦合問題。軌道交通移動裝備空氣動力學?運行控制聯合仿真方法,如圖2 所示。
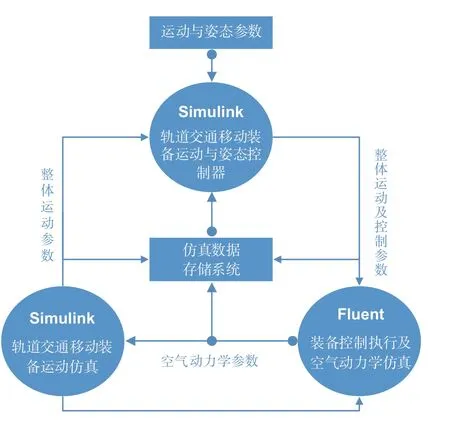
圖2 軌道交通移動裝備空氣動力學?運行控制聯合仿真方法
運行控制器發出指令,將當前移動裝備的運行控制和狀態信息傳遞給執行器,由Fluent 軟件求解器作為Simulink 的計算引擎,實時提供聯合仿真所需要的空氣動力學參數;Simulink 接受氣動參數信息,求解下一時刻移動裝備的運動參數及動力系統的控制參數并反饋給控制器;再由控制器輸入至Fluent中實現閉環[6]。
軌道交通移動裝備空氣動力學?運行控制聯合仿真是對移動裝備實時運動行為的分析,由基于動網格技術的仿真方法提供各時間節點的瞬時邊界條件以及力學參數,聯合實現依賴于Simulink 與Fluent兩種不同仿真環境下的數據交互,因此需要一種監測程序實現并行,該程序的主要作用便是共享信息創建以及仿真進程管理。聯合仿真指令下達后,該監測程序啟動Simulink 與Fluent 軟件并以共享文件的形式為兩類仿真環境提供實時數據的更新與傳遞;Simulink 與Fluent 軟件分別以M 函數以及Userdefined Adjust UDF 的形式對監測程序的共享信息進行訪問與提取[7]。
2 軌道交通數字仿真平臺總體設計方案
2.1 需求分析
軌道交通移動裝備多學科數字仿真平臺是多學科仿真的分析系統,集仿真數據、資源調度和人員權限的管理平臺,具備子系統拓展、知識沉淀和項目管理等擴展功能[8]。
所建平臺應具備Web 化、模塊化、高安全性和開放性特點,包含平臺門戶,分析子系統以及仿真數據管理子系統。平臺門戶提供集中的操作維護界面,開放性設計體現在提供開放的集成接口,支持第三方系統集成。分析子系統覆蓋移動交通裝備分析設計的常用學科仿真計算,各學科針對具體分析場景包含并拓展對應的仿真模板,模板有若干個功能模塊組成。仿真數據管理子系統管理仿真前后處理的數據,如列車模型、計算簡報和結果文件等各類型的異構數據。
2.2 架構設計
數字仿真平臺是面向工程專業領域、工程數據、人員、工具、知識、項目及流程的系統化集成管理系統[9],本文基于BS/CS 混合架構搭建仿真平臺,以Client 形式實現多學科聯合仿真,分別從用戶層、業務層、應用層、基礎層4 個層面完成整體架構設計,如圖3 所示。
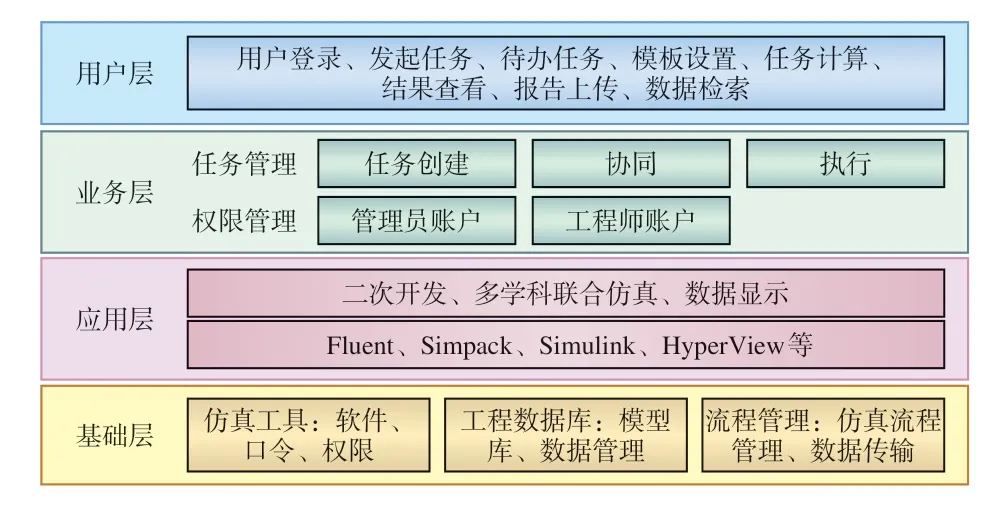
圖3 軌道交通移動裝備數字仿真平臺整體架構
仿真項目與項目管理的結合可以對仿真任務進行管理,實現任務的分配,計劃任務節點的控制,以及用戶權限等管理功能。授權用戶在仿真平臺的工作流,即業務層與應用層對應關系。如圖4 所示,針對不同仿真任務,仿真平臺按照流程模板選擇幾何/有限元模型,以及輸入載荷和邊界條件等信息,完成任務并自動生成計算報告。任務結束后,過程、結果數據保存到工程數據庫中,可實現平臺調閱和各類數據檢索。
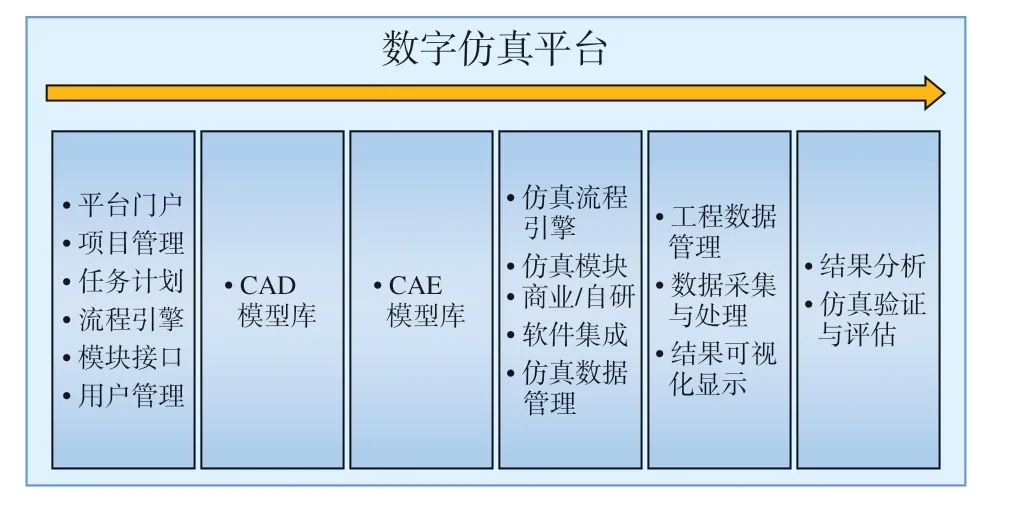
圖4 業務流程與應用層順序關系
2.3 功能設計
仿真平臺功能設計包括系統基礎框架、仿真流程管理、數據庫、仿真及后處理5 大功能模塊,如圖5 所示。

圖5 仿真平臺功能設計
(1)系統基礎框架功能。平臺具備獨立的圖形界面、賬號創建、權限管理功能。不同權限的工程師可根據分配的任務在平臺上進行專業分析等應用。
(2)仿真流程管理功能。平臺具備項目管理功能,對各種仿真任務進行管理,實現任務的分配,工程數據的顯示,計劃任務節點的控制,以及用戶權限等管理功能。
(3)數據庫功能。平臺具備軌道交通移動裝備動力學和控制系統模型庫,可實現模型的導入和編輯功能;數據庫具備計算仿真文件存儲功能,包括計算文件、簡報、載荷等信息,并可實時數據檢索調閱。
(4)計算仿真功能。基于給出的Fluent 計算軟件、Simpack 軟件以及Simulink 計算軟件對空氣動力學模塊,系統動力學模塊,運行控制模塊3 大子系統進行封裝,并實現多學科分析軟件的集成和封裝管理。
(5)后處理功能。實現平臺可視化,設計過程中生成的CAD/CAE 文件能夠輕量化地上傳,對各類數據直接進行圖形瀏覽。
3 軌道交通移動裝備仿真數據管理系統
為實現軌道交通移動裝備的設計流程與仿真流程的有效融合以及海量仿真異構數據的管理,本文提出一種仿真數據管理系統以適應數字仿真平臺流程化建設。
仿真數據管理系統具備仿真流程管理、仿真數據管理、仿真工具集成以及數據安全管理功能,用于管理仿真過程中產生的仿真流程數據、中間數據、模型數據、仿真數據和文檔數據等,能夠對海量異構的仿真數據進行集中、高效與統一的管理,實現數據的重用性和可追溯性,制定統一的數據標準與規范[10]。本文所建軌道交通移動裝備仿真數據管理系統整體框架,如圖6 所示。
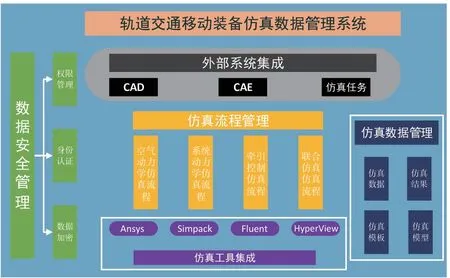
圖6 軌道交通移動裝備仿真數據管理系統整體框架
仿真數據管理系統采用面向服務的架構(SOA),獨立于數字仿真平臺,使得不同的功能單元利用通用的方式進行交互,其二次開發功能將數據庫與各類仿真軟件有效結合,從而實現從任務發起至任務完成的標準化。
3.1 仿真流程管理
為消除單一個體經驗仿真帶來的結果多樣化且難以驗證性,本文提出一種集單一學科仿真與多學科聯合的仿真流程管理方法以實現仿真流程控制及優化。包含軌道交通移動裝備空氣動力學、系統動力學、牽引控制、聯合仿真4 個仿真流程子模塊,可實現仿真任務分配、人員協同、過程監控、規范執行和提升效率的功能。
3.2 仿真數據管理
仿真數據管理子模塊以輕量化的方式對仿真過程中產生的異構數據進行存儲及其它功能操作。異構數據包括仿真過程數據、仿真結果數據、仿真模型數據和仿真模板數據,該模塊可實現多學科仿真數據的交互與傳輸,具備元數據管理、過程數據管理、高級數據檢索、數據權限管理以及數據版本控制等功能,對于軌道交通移動裝備仿真知識管理、多學科協同優化具有積極的作用。
3.3 數據安全管理
數據安全管理子模塊具備權限管理、身份認證以及數據加密的功能。數字仿真平臺提供的權限管理功能針對特定管理員及用戶開放特定的數據,特定人員具備特定數據的功能性操作權限,并采用身份認證,數據加密的方式來保證仿真數據管理系統的安全性。
3.4 外部系統集成
外部系統集成子模塊主要是為了實現仿真數據管理系統與外部系統的信息交互和傳遞,該模塊具備CAD/CAE、另類學科仿真的外部接口,支持企業內部的定制與開發,并通過預留接口的方式實現整體數字仿真平臺的二次開發及完善。
3.5 仿真工具集成
仿真工具集成子模塊包含仿真數據集成、開發工具集成以及聯合仿真集成,該模塊針對定制的各類學科分析軟件進行二次開發,平臺用戶可通過直接輸入參數的方式獲得計算結果,并可以實時調用過程文件,監控仿真過程。
4 結束語
本文基于多學科內在交互耦合關系提出了軌道交通空氣動力學?系統動力學、運行控制?系統動力學和運行控制?系統動力學聯合仿真計算方法,實現了實時仿真的流程化,為軌道交通移動裝備的設計與研發提供參考;從多學科耦合、平臺集成、仿真數據管理3 個方面完成軌道交通移動裝備數字仿真平臺整體框架構建以及功能設計,所建數字仿真平臺有效解決了現如今多學科總體設計難以協同、動態實時交互困難、流程管理閉環難以共享等問題。
猜你喜歡
今日農業(2022年15期)2022-09-20 06:56:20
工業設計(2022年8期)2022-09-09 07:43:20
寧波大學學報(理工版)(2022年4期)2022-07-08 05:12:02
華北理工大學學報(自然科學版)(2021年3期)2021-07-03 09:06:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:29:09
中央社會主義學院學報(2016年2期)2016-05-04 04:18:29
雜文月刊(2016年1期)2016-02-11 10:35:51