直驅風力發電機變槳距控制系統
2020-12-09 21:27:29宋文宇
中國電氣工程學報 2020年8期
宋文宇
摘要:本文論述直驅風力發電機控制系統變槳距控制系統,槳距角位置控制由一個PI控制器調節,在不同的槳距角時可調節該控制器系數保證得到合適的氣動轉矩,由此推動直驅風力發電機轉子到達發電機額定轉速。在此系統中,風力發電機主軸轉速也由變槳距控制系統控制,用一個 PID控制器進行調節。發電機主軸轉速調節作為串級調節的主調,槳距角位置控制調節作為副調控制執行器(變槳電機)進行風力發電機槳葉調節。
關鍵詞:? 變槳距,控制器,轉速控制
一、前言
風力機的直驅化是風力機發展的一個趨勢。目前大多風電系統發電機與風輪通過變速齒輪相連,齒輪箱裝置不僅降低了系統的效率,增加了系統的成本,而且容易出現故障。直驅式風力發電機可以直接與風輪相連,增加了系統的穩定性,在直驅風力發電系統中風機與發電機直接耦合,省去了傳統風力發電系統中的國內難以自主生產且故障率較高的齒輪箱這一部件,因此,沒有齒輪箱的直驅式風力發動機,具備低風速時高效率、低噪音、高壽命、減小機組體積、降低運行維護成本等諸多優點。
隨著國內風力發電行業的快速發展,風力發電機組國產化已經成為趨勢,打破國外設備的壟斷的同時大幅降低了機組成本。而作為900KW風力發電機組變槳距控制系統,要充分利用風力調節漿葉的迎風角度,進而調節發電機轉速恒定在額定轉速,從而使發電機能夠以額定功率發電。由于風速隨時都在變化,漿葉的迎風角度也要時刻進行調整。并且在風速過大時,變槳距調節系統要作為氣動剎車自動順槳以避免風力發電機組可能的超速而帶來的危險。
二、系統概述
本變槳距控制系統應用于900KW風力發電機組。變槳距系統控制主要包括發電機主軸轉速閉環控制,槳葉槳距角位置閉環控制,手動維護轉動程序控制,變槳距系統故障檢測和保護控制,各保護系統切換等。對于變速變槳距風力發電機組,當風速在額定風速以下時,通過控制發電機的電磁轉矩,實現對風力機的轉速控制,使風力發電機組獲得最大的風能利用系數;當風速高于額定風速時(此時發電機轉矩為額定轉矩,值恒定),通過變槳減少風輪吸收的功率,使輸出功率恒定。當然,由于變槳驅動系統不能跟隨上快速變化的風,因此允許發電機轉速瞬時升高,將瞬變的風能以風輪動能的形式存儲起來,風速降低時,再將動能釋放出來,從而使輸出功率恒定(此時,風能被捕獲,但是沒有被完全轉換成電能)。
1.變槳控制系統配置
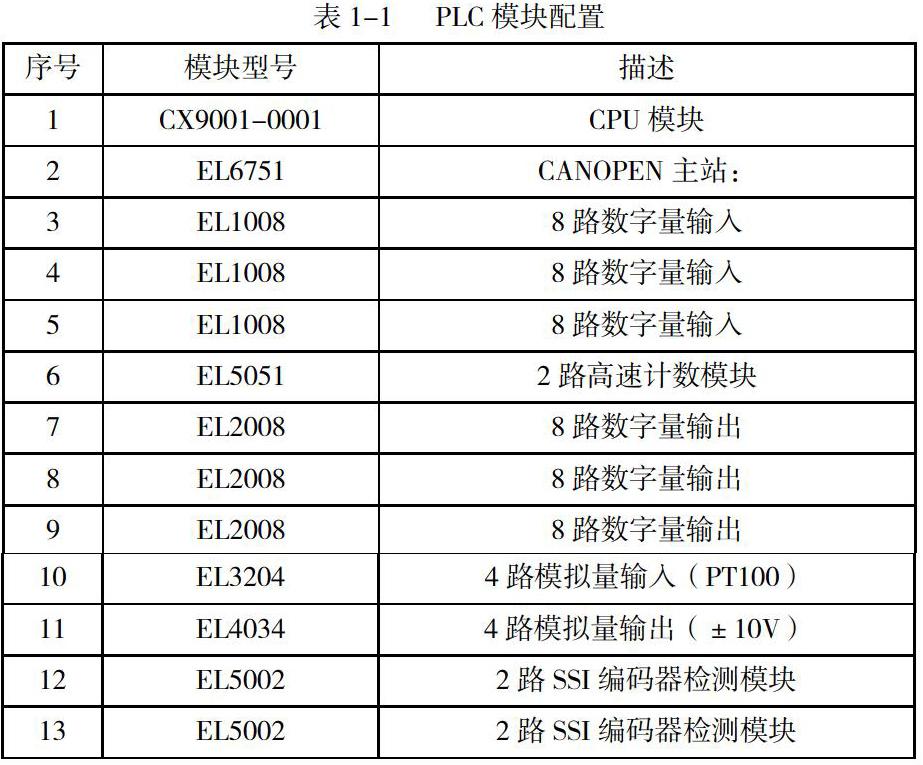
主控制器PLC采用倍福CX9000系列緊湊型以太網控制器,用于帶E-bus的EtherCAT端子模塊,導軌安裝,不僅便于安裝而且變槳距系統柜內空間較小的情況下節省了一定的空間。其他各個模塊通過EtherCAT進行連接。主要模塊如表1-1所示:
2.系統控制流程
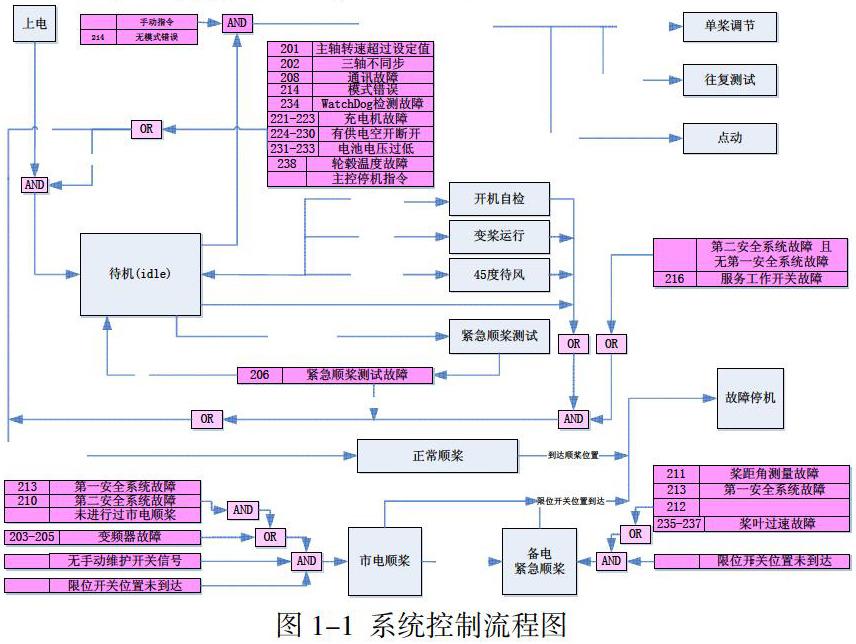
控制系統主要包括上電初始化,故障檢測及處理,手動調節,自動調節運行等。上電后初始化,進行數據采集及通訊。當有故障時進行故障處理;滿足手動命令時進入手動調槳功能;無故障且非手動時進入待機狀態,當風力發電機組有運行指令時進入自動調節運行狀態。
系統總體控制流程框圖如圖2-1所示:
三、變槳距系統閉環控制
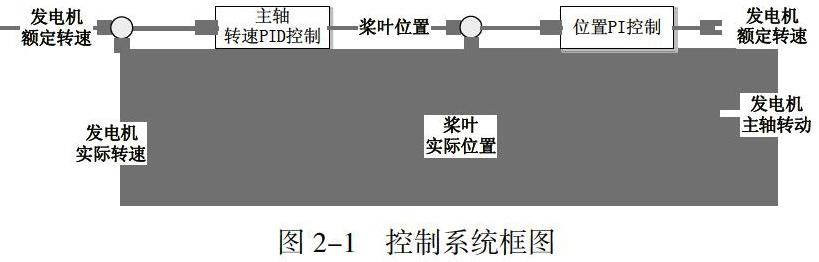
變槳距控制系統采用槳葉位置閉環PI控制和發電機轉速閉環PID閉環控制雙回路控制系統。其中發電機轉速閉環作為主調。由設定的額定發電機轉速和發電機實際轉速做閉環,輸出的槳距角給定和實際槳距角值做閉環,輸出變槳電機變頻器的頻率給定。控制系統框圖如圖2-1所示:
當經過濾波的發電機實際轉速未到達額定轉速時,主軸轉速PID控制器輸出槳距角位置給定值給位置PI控制器,PI控制器根據此給定位置和當前實際槳距角位置值調節輸出給槳葉電機變頻器轉動槳葉電機,使當前的槳距角位置增大或減小以減小或增大槳葉受風面,進而減小或增大發電機轉速,使發電機轉速到達額定。
四、控制系統保護功能
風力發電機組涉及到如電網掉電、發電機超速、風速過大等故障時,需要變槳距系統順槳以實現主軸剎車從而起到保護功能。而變槳距系統自身也需要對出現的故障進行檢測和保護,以下是一些變槳距系統自身檢測并處理的主要故障保護功能:
1.電網掉電保護
當電網掉電時,變槳距控制系統由備用電源給驅動器直流母線供電,24VDC控制電也由備用電源提供,此時驅動器執行備電緊急順槳,直至限位保護開關動作。
2.電網欠壓/過壓保護
當電網出現過壓或欠壓時,變槳距控制系統執行正常順槳。控制系統具有低電壓穿越能力,當電網故障或擾動引起風電場并網點的電壓跌落時,在一定電壓跌落的范圍內,變槳距控制系統能夠正常運行。
3.通訊故障保護
當變槳距系統PLC與主控CAN-OPEN通訊故障或與各驅動器之間通訊故障時,變槳距控制系統執行正常順槳。
4.轉子過轉速故障
轉子超過最大轉速限定值(有超速保護開關動作)時,變槳系統斷開看門狗輸出,執行緊急順槳操作。
5.第一安全系統故障
電機驅動器順槳超過45S仍然沒有到達順槳位置。
6.第二安全系統故障
備用電池緊急順槳超過30S仍然沒有到達順槳位置。
7.槳距角測試故障
葉片到達保護限位開關時,當前槳距角測量值與順槳位置槳距角的設定值(85°~92°可設定)相差大于1.5°時;或者未到達限位開關位置,且當前角度測量值大于限位開關位置初始設定值時,系統斷開看門狗信號緊急順槳。
8.葉片不同步保護
對三個槳葉的角度進行監控,當三軸之間槳距角偏差超過3度并持續5秒(可設)時,變槳距控制系統執行正常順槳。
9.變槳伺服驅動器故障保護
當發生變槳伺服驅動器內部故障時,變槳距控制系統執行市電順槳。此時電機由市電直接供電轉動至限位保護開關位置停止。
10.后備電源保護
當后備電源欠壓,供電回路跳閘,充電機故障,充電回路不正常時,變槳距控制系統執行正常順槳。
11.安全鏈保護
變槳距系統安全鏈將安全保護點與變槳距系統PLC看門狗輸出串聯,其中任一點出現故障斷開時,變槳距系統執行緊急順槳
12.限位開關、槳距角超限保護
當變槳距系統槳葉到達限位開關位置,驅動器封鎖輸出并抱閘。當槳距角超出變槳距系統設定的范圍-10~100度時,變槳距系統投入備用電源緊急順槳。
13.槳葉過速故障
當變槳速度超過系統最大轉速時,變槳距系統由備用電源執行緊急順槳。
14.各順槳之間的切換保護
系統在正常順槳或市電順槳在一定時間后未到達安全位置,則進行備電緊急順槳。當備電緊急順槳在一定時間后未到達安全位置,則未到達安全位置的槳葉進行正常順槳。
五、結論
本項目已經在風力發電場整機并網發電運行,變槳距系統各功能在經過實驗室模擬調試、總裝廠地面調試、現場輪轂安裝調試、整機并網發電運行后,已經能夠通過變槳距控制系統調節槳葉位置,繼而調節發電機轉速到達額定轉速并網發電。而且變槳距控制系統的各個故障安全保護功能以及保護功能之間的切換也達到了項目預期的要求。
參考文獻
[1] Tony Burton (美),武鑫 (著),風能技術,科學出版社, 2007年.
[2] Beckhoff Information System 04/2010,
