基于擴展跟蹤誤差的魯棒模型預測控制
2020-12-17 03:27:53武梓涵施惠元蘇成利
當代化工 2020年11期
武梓涵 施惠元 蘇成利

摘? ? ? 要:針對一類工業過程中系統存在著外界擾動及不確定性等問題,提出一種基于擴展跟蹤誤差的魯棒模型預測控制(RMPC)方法。與傳統狀態空間模型不同,采用帶有系統狀態增量和輸出跟蹤誤差的狀態空間擴展模型,使系統在消除穩態誤差的同時,可以分別調節系統狀態的動態響應和輸出跟蹤誤差。基于該模型下設計的系統控制律不但保證了系統的收斂性和跟蹤性能,還為控制器的設計提供更多的自由度。在此基礎上,通過差分方程構建李雅普諾夫(Lyapunov)函數,得出保證系統穩定的線性矩陣不等式(LMI)形式的充分條件。此外,考慮到未知有界干擾以及不確定性對系統性能的影響,將H無窮性能指標引入到穩定性條件推導中。最后,在線求解LMI來獲得系統的控制律,并通過仿真驗證本文提出方法的有效性和可行性。
關? 鍵? 詞:魯棒模型預測控制(RMPC);跟蹤誤差;不確定性;系統擾動;H無窮
中圖分類號:TP 273? ? ? ? 文獻標識碼:A? ? ? ?文章編號: 1671-0460(2020)11-2592-06
Robust Model Predictive Control Based on Extended Tracking Error
WU Zi-han, SHI Hui-yuan, SU Cheng-li*
(School of Information and Control Engineering, Liaoning Shihua University, Fushun 113001, China)
Abstract: Aiming at the problems of external disturbance and uncertainty in a class of industrial processes, a robust model predictive control (RMPC) method based on extended tracking error was proposed. Being different from the traditional state space model, a state space expansion model with system state increment and output tracking error was adopted so that the system could adjust the dynamic response of the system state and output tracking error while eliminating the steady state error. The system control law was designed based on this model, which not only guaranteed the system's convergence and tracking performance, but also provided more freedom for the design of the controller. The Lyapunov function was constructed by the difference equation, and sufficient conditions in terms of linear matrix inequality (LMI) form were given to ensure the stability of the system. In addition, considering the influence of unknown bounded disturbance and uncertainty on system performance, the H infinite performance index was introduced into the derivation of the stability condition. Finally, the system's control law was obtained by online solving LMI, and the validity and feasibility of the proposed method were verified by simulation.
Key words: Robust model predictive control (RMPC);? tracking error; uncertainty; system disturbance; H infinite
隨著現代工業的快速發展,對產品質量要求的日益嚴格,不同控制回路間關系更加復雜,傳統的控制方法有煩瑣的計算量和一定的保守性,在后期的操作和維護上不能滿足工業生產的需求[1]。因此,為了解決這一問題,迫切需要提出新的控制方法來保證系統高效穩定的運行[2]。其中,模型預測控制(MPC)被公認為最具有應用價值的先進過程控制方法,并受到學者們的廣泛關注與研究[3-4]。
WANG[5]等提出一種基于非最小狀態空間的模型預測控制方法,解決系統多變量問題處理的同時,可以對系統的控制律進行在線優化。孔小兵[6]等將模型預測控制作為主要控制方法應用在永磁電機系統中,取代了常規線性控制,該方法能在線處理系統輸入、輸出和狀態約束等問題,具有良好的動態控制性能。但考慮到系統本身不確定性等因素的影響,過程模型與被控對象之間可能會出現失配問題,從而大大降低模型預測控制的性能。而魯棒控制可以有效解決系統不確定性問題。為此,在保留模型預測控制優點的基礎上,許多學者將魯棒控制思想引入模型預測控制策略中,提出了魯棒模型預測控制(RMPC)方法,并迅速成為工業控制領域的研究熱點[7-8]。TORGASHOV[9]等將魯棒模型預測控制方法應用在蒸餾塔的被控對象中,與傳統控制方法相比,該方法解決了系統不確定性對模型的干擾問題,能靈活處理系統多回路間的控制約束,使蒸餾塔具有更優的控制性能。但在控制器的設計上沒有考慮到系統會受到未知有界擾動的影響,在實際應用中可能會出現系統超調等現象。馬大中[10]等針對非線性無窮分布時滯參數不確定系統,設計了一種能夠保證濾波誤差系統漸進穩定的魯棒H無窮濾波器,能夠滿足H無窮的性能指標。然而上述所提出的方法均采用傳統狀態空間模型,使得系統的跟蹤性能和控制性能存在一定的局限性。
針對上述所存在的問題,本文提出一種基于擴展跟蹤誤差的魯棒模型預測控制方法。采用增量式的狀態空間模型,將輸出跟蹤誤差擴展到狀態空間模型中,保證系統狀態和輸出跟蹤誤差可以同時收斂,提高了系統的跟蹤性能和控制性能,并且增加控制器調節的自由度。此外,考慮到未知有界干擾以及不確定性對系統性能的影響,將H無窮性能引入到穩定性條件的推論中,使系統具有較強的抗干擾能力。最后,通過仿真驗證本文方法的有效性和可行性。
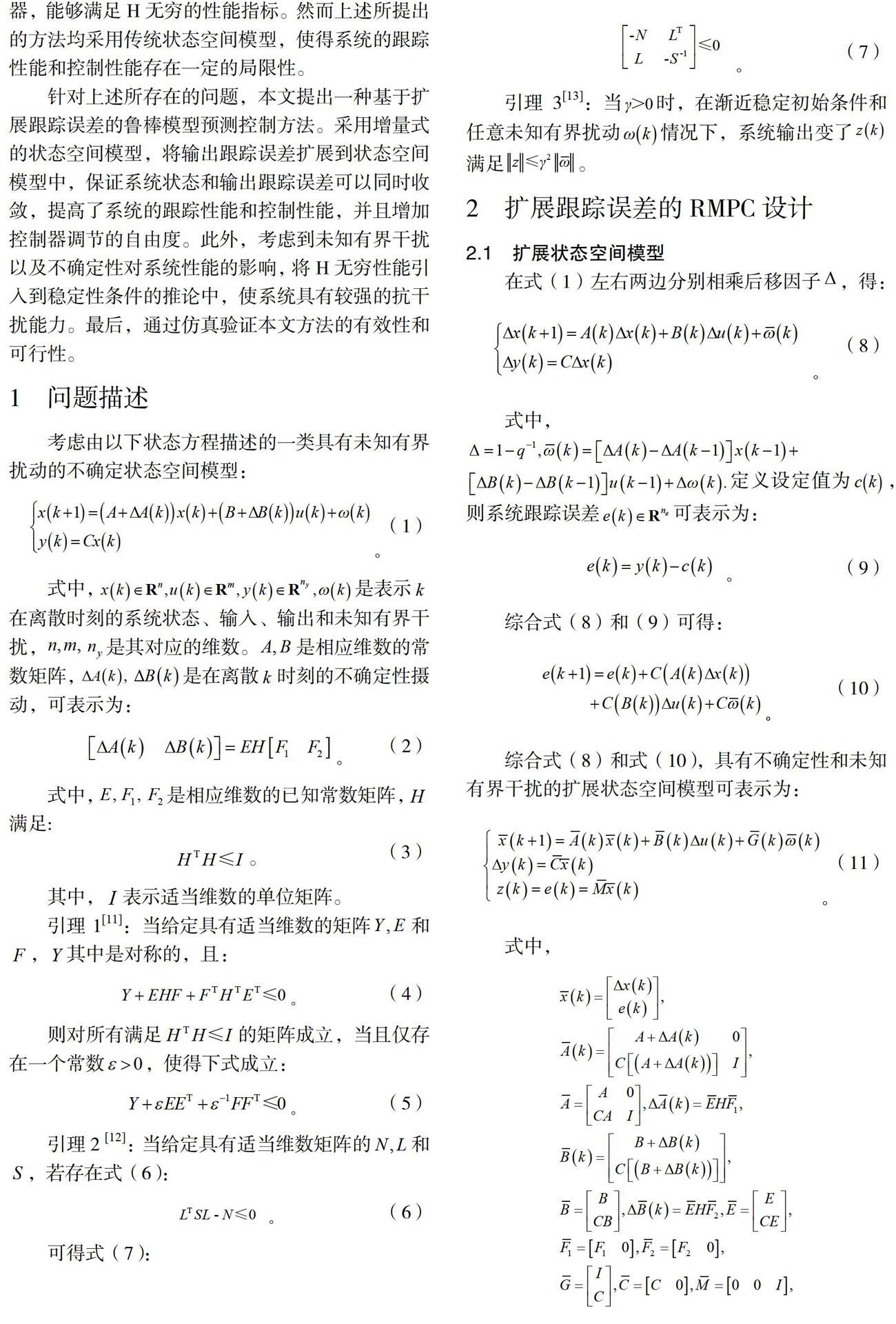
1? 問題描述
考慮由以下狀態方程描述的一類具有未知有界擾動的不確定狀態空間模型:
。(1)
式中, 是表示 在離散時刻的系統狀態、輸入、輸出和未知有界干擾,? 是其對應的維數。 是相應維數的常數矩陣,? 是在離散 時刻的不確定性攝動,可表示為:
。? ?(2)
式中, 是相應維數的已知常數矩陣, 滿足:
。? ? ? ? ? ? (3)
其中, 表示適當維數的單位矩陣。
引理1[11]:當給定具有適當維數的矩陣 和 , 其中是對稱的,且:
。? ? ? ? (4)
則對所有滿足 的矩陣成立,當且僅存在一個常數 ,使得下式成立:
。? ? ? ? (5)
引理2 [12]:當給定具有適當維數矩陣的 和 ,若存在式(6):
。? ? ? ? ? ? (6)
可得式(7):
。? ? ? ? ?(7)
引理3[13]:當 時,在漸近穩定初始條件和任意未知有界擾動 情況下,系統輸出變了 滿足 。
2? 擴展跟蹤誤差的RMPC設計
2.1? 擴展狀態空間模型
在式(1)左右兩邊分別相乘后移因子 ,得:
。 (8)
式中,
定義設定值為 ,則系統跟蹤誤差 可表示為:
。? ? ? ? ? (9)
綜合式(8)和(9)可得:
。? ? ? (10)
綜合式(8)和式(10),具有不確定性和未知有界干擾的擴展狀態空間模型可表示為:
。(11)
式中,
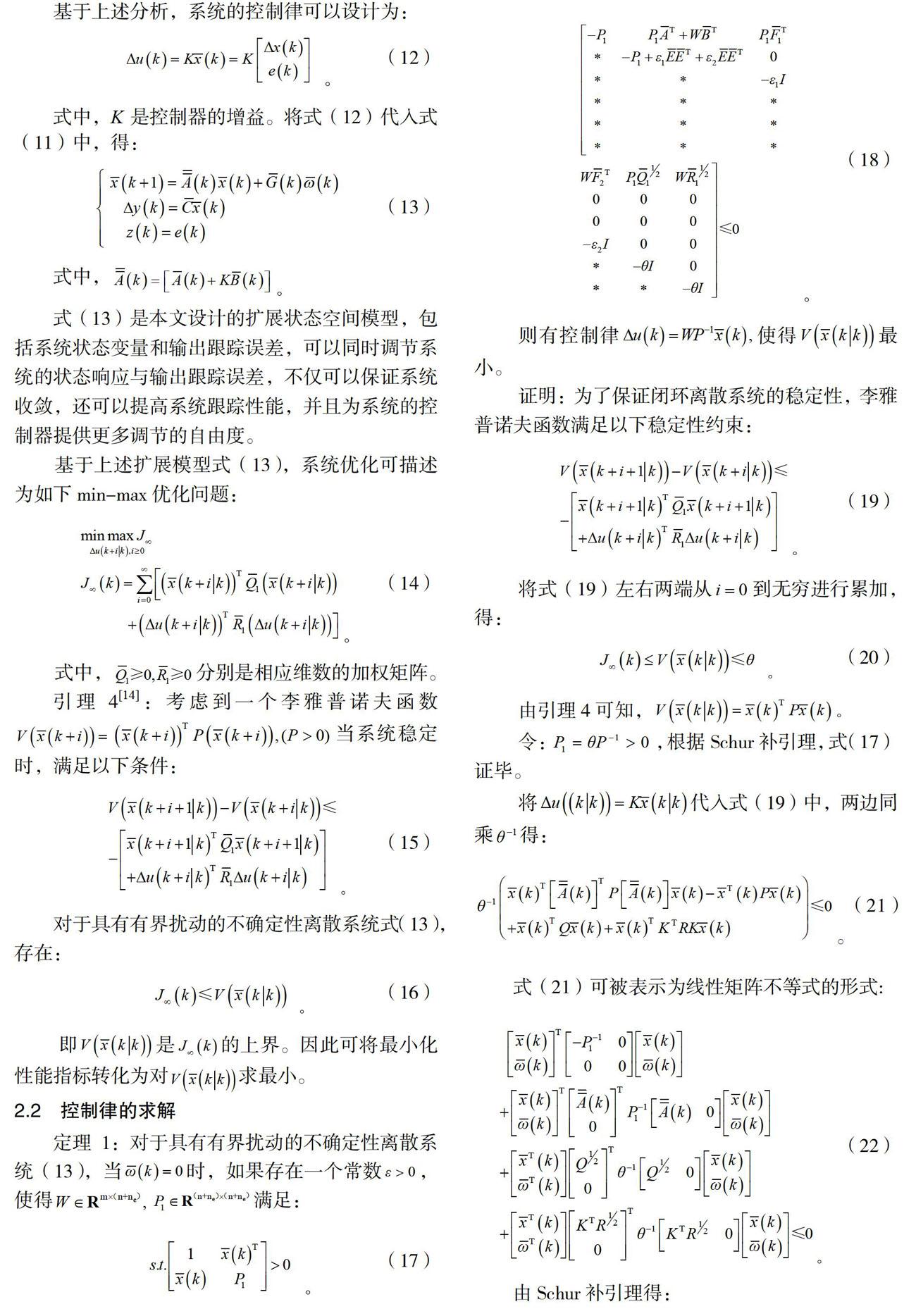
基于上述分析,系統的控制律可以設計為:
。? ? (12)
式中,K是控制器的增益。將式(12)代入式(11)中,得:
(13)
式中, 。
式(13)是本文設計的擴展狀態空間模型,包括系統狀態變量和輸出跟蹤誤差,可以同時調節系統的狀態響應與輸出跟蹤誤差,不僅可以保證系統收斂,還可以提高系統跟蹤性能,并且為系統的控制器提供更多調節的自由度。
基于上述擴展模型式(13),系統優化可描述為如下min-max優化問題:
。? (14)
式中, 分別是相應維數的加權矩陣。
引理4[14]:考慮到一個李雅普諾夫函數? 當系統穩定時,滿足以下條件:
。? ?(15)
對于具有有界擾動的不確定性離散系統式(13),存在:
。? ? ? ? (16)
即 是 的上界。因此可將最小化性能指標轉化為對 求最小。
2.2? 控制律的求解
定理1:對于具有有界擾動的不確定性離散系統(13),當 時,如果存在一個常數 ,使得? 滿足:
。? ? ? (17)
。? (18)
則有控制律 使得 最小。
證明:為了保證閉環離散系統的穩定性,李雅普諾夫函數滿足以下穩定性約束:
。? ? (19)
將式(19)左右兩端從 到無窮進行累加,得:
。? ? ? ?(20)
由引理4可知, 。
令: ,根據Schur補引理,式(17)證畢。
將 代入式(19)中,兩邊同乘 得:
。(21)
式(21)可被表示為線性矩陣不等式的形式:
。 (22)
由Schur補引理得:
。? (23)
因 ,式(23)可被表示為:
。(24)
由引理1可得:
。 (25)
由Schur補引理,左右兩端同乘 ,可得式(18),證畢。
定理2:對于具有有界擾動的不確定性離散系統式(13),當 時,如果存在一個常數 ,使得? 滿足:
。? ? ? (26)
(27)
。
則有控制律 使得 最小。
證明:考慮到系統受到未知有界擾動的影響下,為了保證閉環離散系統的穩定性,由引理3可知,李雅普諾夫函數滿足以下穩定性約束:
。(28)
將 代入式(28)中,兩邊同乘 ,得:
。 (29)
將式(29)表示為線性矩陣不等式的形式,即:
。 (30)
由Schur補引理得:
。 (31)
式(31)可被表示為:
。? (32)
由引理1可知,式(32)可表示為:
。(33)
基于式(33),由Schur補引理,左右兩端同乘? 可得式(27),證畢。
3? 仿真研究
本文以角度定位系統[15]為例,分別采用擴展輸出的狀態空間模型[5]的魯棒預測控制方法(傳統控制方法)和本文所提出的擴展狀態跟蹤誤差的控制方法進行對比仿真[16],驗證本文所提方法的有效性和可行性。該系統的離散不確定模型(1)的系數矩陣為:
系統的初始狀態 ,加權矩陣? 0.000 02,設定值為5,外界未知擾動邊界為0.005,運行時長為500步。為了描述系統的跟蹤性能,定義如下性能指標:
。? ? ? ? (34)
仿真結果如圖1-3所示。其中,圖1為系統輸出響應對比圖,圖2為系統控制輸入對比圖,圖3為系統跟蹤性能對比圖。其中虛線為傳統控制方法,實線為本文控制方法。
在圖1中,通過對比兩種控制方法的輸出曲線可以看出,本文所提出的控制方法在運行時長100步附近達到穩態,使系統輸出可以更快地跟蹤到設定值,并且當存在不確定性和外界未知干擾時,系統依舊能穩定運行。
在圖2中,本文所提出的控制方法可以有效地確保系統控制輸入是在約束范圍內波動的,并使其快速趨于平穩,而傳統的控制方法在系統沒有穩定時,系統的控制量很大,這不僅會增加控制器的計算量,而且控制的時效性也會受到影響。
在圖3中, 為評價性能指標,當性能指標越低時,系統的跟蹤能力越強。本文所提出的控制方法在運行時長40步附近達到穩態,使系統調節速度更快,性能指標更小,同時可以跟蹤上設定值。而傳統的控制方法調節速度緩慢,在不確定性和未知干擾影響的情況下,系統即使達到穩態,也會有小幅度抖動,且跟蹤性能較差。
4? 結 論
針對離散系統存在的不確定性和未知外界擾動等問題,提出一種基于擴展跟蹤誤差的魯棒模型預測控制方法。本文設計了一個新的擴展狀態空間模型,其中狀態變量和跟蹤誤差變量可以被獨立地調節,在保證系統收斂性和跟蹤性能的同時,為控制器的設計提供了更大的自由度。通過構建李雅普諾夫函數,將H無窮性能指標引入到穩定性條件推導中以線性矩陣不等式(LMI)的形式求解對應的控制律。最后,通過仿真結果表明本文提出的控制方法具有較好的跟蹤性能和抗干擾能力,并保證閉環系統高效穩定的運行。
參考文獻:
[1]柴天佑,丁進良,王宏.復雜工業過程運行的混合智能優化控制方法[J].自動化學報,2008,34(5):505-515.
[2]徐利新,胡中功,文小玲,等. 模型預測控制在工業控制領域中的發展與應用[J].武漢工程大學學報,2001,23(1):77-81.
[3]辛斌,陳杰,彭志紅.智能優化控制: 概述與展望[J].自動化學報, 2013,39(11):93-110.
[4]席裕庚,李德偉,林姝. 模型預測控制—現狀與挑戰[J].自動化學報,2013,39(3):222-236.
[6]孔小兵,劉向杰.永磁同步電機高效非線性模型預測控制[J]. 自動化學報,2014,40(9):1958-1966.
[7]謝瀾濤,謝磊,蘇宏業.不確定系統的魯棒與隨機模型預測控制算法比較研究[J].自動化學報,2017,43(6):969-992.
[8]GUO X,REN H P,LI J. Robust model-predictive control for a compound active-clamp three-phase soft-switching PFC converter under unbalanced grid condition[J].IEEE Transactions on Industrial Electronics, 2017, 65(3): 2156-2166.
[9]TORGASHOV Y A. Robust model predictive control of industrial reactive distillation column[J]. Journal of Shenyang University of Chemical Technology, 2009, 23(1): 84-95.
[10]馬大中,王占山,馮健.帶有無窮分布時滯的不確定系統的魯棒H∞濾波器設計[J].控制理論與應用,2010,27(2):9-13.
[11]YU K W, LIEN C H.Stability criteria for uncertain neutral systems with interval time-varying delays[J]. Chaos, Solitons and Fractals, 2008, 38(3): 650-657.
[12]BOYD S, BALAKRISHNAN V. Linear matrix inequalities in system and control theory[J]. Proceedings of the IEEE, 1994, 86(12): 2473-2474.
[13]SHI H Y, LI P.Robust constrained model predictive fault-tolerant control for industrial processes with partial actuator failures and interval time-varying delays[J]. Journal of Process Control, 2019, 75(6): 187-203.
[14]CARROLL T L, PECORA L M. Synchronizing chaotic circuits [J]. IEEE Transactions on Circuits and Systems, 1991, 38(4): 453-456.
[15]孫盛騏,張宇獻,董亮. 離散不確定系統的魯棒預測控制[J].控制工程,2009,16(3):47-51.
[16]余海波,馮裕釗,劉強,等.預測PID控制在SBR工藝中的應用[J].當代化工,2014,43(8):1638-1641.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
