適應弧形壁面運動的爬壁機器人設計
2020-12-23 02:00:46任志奇霍文勝
機電信息 2020年32期
任志奇 霍文勝
(華北電力大學,河北保定071003)
0 引言
爬壁機器人是移動機器人研究領域中的一個重要分支,屬于特種作業機器人,可以替代人在高空危險環境下作業,在許多行業有著非常廣泛的應用前景,如檢測、消防、反恐偵查、清洗除銹、噴漆等領域。它結合了吸附技術、移動技術和控制技術,可附著在垂直或者傾斜的壁面上爬行,在運動過程中可以在機器人身上安裝輔助設備以完成一定的作業任務,極大地拓寬了機器人的應用范圍。
本文主要研究設計了一種輕量化的爬壁機器人,它能適應一定曲率半徑范圍的曲面。將其作為基本的載體應用到各個領域,可以根據作業環境的不同,搭載不同的設備來完成特定任務,具有重要的實踐意義。
1 爬壁機器人的結構設計
爬壁機器人在壁面上運行時,需利用吸附力使機器人與壁面產生靜摩擦力,從而避免自身重力造成跌落的可能性。機器人的機械結構主要包括:機身主體、驅動機構、吸附系統和行走機構。吸附系統是爬壁機器人的核心,機身主體是基礎,驅動機構是必需結構。利用三維建模軟件Pro/e對機器人的總體結構進行設計,提出一種基于負壓吸附、單吸盤式、三輪支撐運動的爬壁機器人,通過離心風扇產生足夠的吸附力,吸附在垂直或者傾斜壁面上運行,爬壁機器人總體結構如圖1所示。
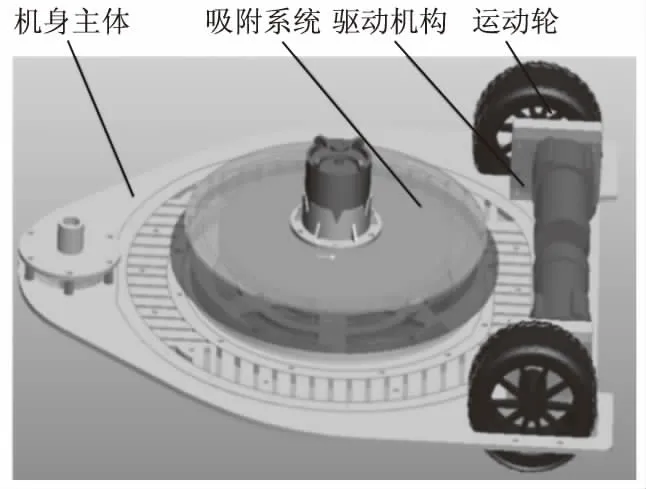
圖1 爬壁機器人總體結構
機器人在工作過程中始終需要自身提供吸附力,此吸附力可等效看作是對機器人施加的垂直于壁面的正壓力,從而與壁面產生靜摩擦力,保證機器人穩定運行。爬壁機器人要適應不同平面和曲面的特殊性,本文設計的爬壁機器人采用單吸盤式負壓吸附結構。吸附結構由無刷電機、離心風機葉輪、密封裝置、密封裙等組成。其中,離心式風機葉輪在高速旋轉做功過程中,首先將機器人密封吸盤內的氣體排出,使得吸附腔內壓力低于外界大氣壓,在內外壓差作用下外部大氣經過密封組件與壁面之間的縫隙進入機器人本體腔內,然后低壓氣流再次被葉輪送出到腔體外,最終形成一個循環系統,能始終保持吸盤內部較為穩定的“負壓”。
爬壁機器人選用“2個驅動輪+1個從動輪”來實現支撐和運動,其中從動輪為萬向輪。相比于四輪運動機構,三輪運動方式能更好地適應曲面,同時運行也更加穩定。機器人的設計主要針對爬行的表面區域是凸出壁面,在任意位置時,機器人都能很好地吸附在壁面上,防止輪子打滑。相比一般的爬壁機器人將密封機構布置于運動輪的外側,本文設計的機器人密封機構布置于支撐輪內側,密封裙能夠更好地貼合壁面,適應凸出的曲面。本設計選用降落傘布包裹低密度彈性海綿作為組合密封裙,低密度彈性海綿作為填充物,能減小運動阻力,同時能適應不同的工作表面;降落傘布的摩擦系數小,有效減小了運動阻力,同時良好的耐磨性能可延長密封裙的使用壽命。
驅動機構包括直流減速電機、減速器和驅動輪,通過產生驅動力并傳遞到驅動輪上,驅動機器人在壁面運動。驅動機構采用雙輪單獨驅動的機構形式,結構簡單;機器人在轉向過程中,可以利用差速驅動,控制兩輪的轉速、大小,在極小的轉彎半徑下實現轉向。
2 爬壁機器人對曲面的適應性分析
爬壁機器人對弧形壁面有一定適應性,影響適應能力的主要因素有車輪與底板的垂直距離和車輪之間的距離。曲率半徑示意圖如圖2所示。
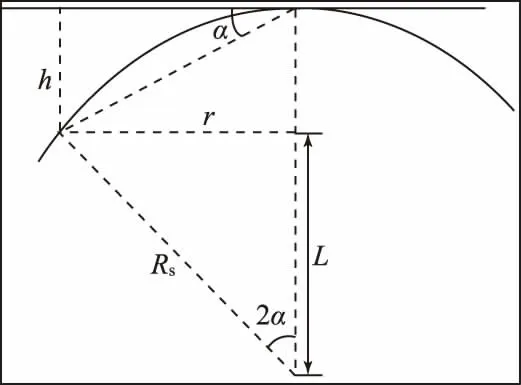
圖2 曲率半徑示意圖
如圖2所示,h為輪子距底板的高度,Rs為曲面的曲率半徑,r為輪子接觸點到軸線的距離。由幾何知識可知:

由空間幾何關系可知,r和h為已知,爬壁機器人的底板高度需滿足條件:

聯立式(1)、式(2),可得爬壁機器人工作曲面的曲率半徑條件為:

3 吸附系統的流道仿真
該爬壁機器人設計的離心風扇的流道模型較為特殊,要去除動葉輪模型部分,首先需要建立離心風扇流道的三維模型,主要包括進風口流道、葉輪流道以及出口流道。將保存的風扇模型導入Gambit軟件中,采用非結構網格劃分方法進行網格劃分,選擇Fluent5/6求解器,共產生154 856個網格。
在離心風扇三維流場模擬中,將生成的網格文件導入FLUENT軟件中,先建立兩處交接面:選取進口流道斷面和葉輪流道斷面重合的邊界,葉輪流道圓周邊界和蝸殼流道內側邊界,并進行網格檢查。對風扇流道進行數值模擬,初始條件設置為大流量、高轉速情況,轉速為10 000 r/min,仿真計算得出結果。
風扇流場截面的全壓等于動壓與靜壓之和。選取離心風扇葉輪的中間截面,全壓等于出口氣體全壓與入口氣體全壓之差,且全壓在各葉輪之間也呈對稱分布。氣體在剛進入旋轉葉輪的流道區域壓強較低,進入負壓腔的空氣迅速向四周擴散,造成風扇流場中心區域氣壓較低,且與風扇葉輪內部有明顯的邊界。設計人員通過分析流場內部的全壓可以預測風扇的性能。
4 爬壁機器人吸附實驗
設計人員通過加工制作機器人的零件并進行裝配完成實驗樣機,在實驗室環境下測試,暫不考慮外部因素(風力、濕度、工作表面清潔程度等)的影響。機器人在表面有2 mm高、3 mm寬縫隙的垂直壁面可以穩定吸附;實驗機器人可以穩定吸附于曲面半徑約為1 m的圓形壁面,同時實驗過程中,當調整爬壁機器人在不同姿態時,都能實現穩定吸附。
機器人吸附能力測試中,將爬壁機器人置于負壓吸附力方向與自身重力方向相反的壁面進行測試。經過反復多次測試吸附力得出,該機器人的吸附力約為100 N。
5 結語
本文設計的爬壁機器人的離心式葉輪及流道能產生較高的負壓;組合密封裙可以很好地適應弧形壁面,彈性海綿能及時地適應工作表面的變化,始終維持密封腔內部穩定的負壓。設計的爬壁機器人能適應一定曲率范圍的弧形壁面,為后續機器人適應不同環境進行多任務作業提供了一定參考。
