基于單片機的汽車行駛智能記錄儀研發(fā)
2020-12-23 06:57:07杜曉輝
微型電腦應(yīng)用
2020年11期
關(guān)鍵詞:單片機
杜曉輝
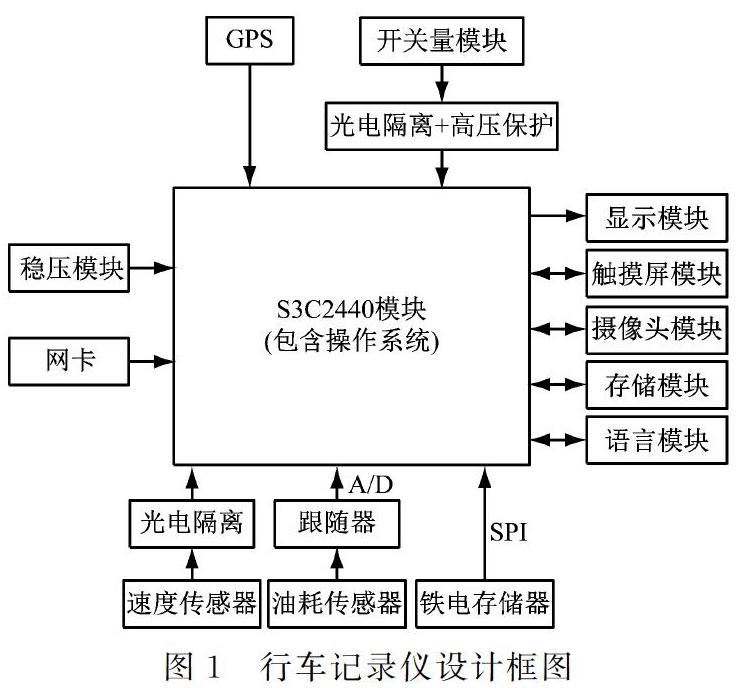
摘 要:設(shè)計了一款基于單片機的行駛記錄儀,該行車記錄儀采用S3C2440單片機作為控制器,主要由主控CPU、GPS、CMOS攝像頭、存儲模塊、觸摸顯示屏、傳感器等模塊構(gòu)成,基于S3C2440的工作原理詳細設(shè)計了行駛記錄儀的硬件電路和主要功能模塊,可實時高效的采集車輛的狀態(tài)及GPS定位信息,使行車記錄儀功能的自動化與智能化水平得到有效提升,可對運行于不同路況下的汽車狀態(tài)進行全程同步記錄和監(jiān)控。
關(guān)鍵詞:行車記錄儀;單片機;GPS;攝像頭;串口通信;Access
中圖分類號:TP 368.1
文獻標(biāo)志碼:A
文章編號:1007-757X(2020)11-0137-03
Abstract:This paper designs a driving recorder based on a single-chip microcomputer. The driving recorder uses an S3C2440 single-chip microcomputer as a controller, and is mainly composed of main control CPU, GPS, CMOS camera, storage module, touch screen, sensor and other modules. The working principle of the design of the hardware circuit and main functional modules of the driving recorder is introduced in detail. The device can collect the status of the vehicle and GPS positioning information in real time and efficiently, so that the level of automation and intelligence of the driving recorder function is effectively improved. Car status can be recorded and monitored at all time under road conditions.
Key words:driving recorder;microcontroller;GPS;camera;serial communication;Access
0?引言
不斷提高的物質(zhì)生活水平促使人們對汽車的需求量持續(xù)增加,汽車已成為出行中不可缺少的交通工具,在帶來極大便利的同時由道路上不斷增加的車流量密度導(dǎo)致的交通擁堵問題日益突出,為交通安全帶來較大的挑戰(zhàn),交通事故時有發(fā)生,為人們的生命財產(chǎn)安全帶來不同程度的威脅,并且在發(fā)生交通事故后需對事故糾紛進行協(xié)調(diào),尤其是在一些特殊路況或較偏辟的地方發(fā)生的交通事故因沒有監(jiān)控設(shè)備覆蓋到而極大的增加了警方的判斷與協(xié)調(diào)能力。初始小巧輕便且易于安裝到車輛上的汽車行駛記錄儀不斷發(fā)展和完善起來,專門為汽車內(nèi)部構(gòu)造設(shè)計,實現(xiàn)了對不同路況下汽車運行狀態(tài)的全程同步記錄與監(jiān)視功能,記錄相關(guān)的監(jiān)控數(shù)據(jù),可幫助司機和交通部門實時監(jiān)控車輛,為判斷交通事故原因提供科學(xué)有效的證據(jù)。據(jù)此對運行車輛實施科學(xué)高效的管理和調(diào)度,為安全行駛提供了保障[1]。……
登錄APP查看全文
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計工程(2015年8期)2015-02-27 12:05:36
