基于FPGA+DSP的北斗信號(hào)快速捕獲算法設(shè)計(jì)與實(shí)現(xiàn)
2020-12-23 11:25:40高唱陳則王曾慶喜呂查德
河北科技大學(xué)學(xué)報(bào) 2020年6期
關(guān)鍵詞:信號(hào)
高唱 陳則王 曾慶喜 呂查德
摘 要:?為了解決北斗衛(wèi)星接收機(jī)中傳統(tǒng)并行頻率捕獲算法傅里葉變換需要處理的數(shù)據(jù)量大而影響衛(wèi)星信號(hào)捕獲速度的問(wèn)題,提出了一種基于相干降采樣的北斗信號(hào)快速捕獲算法。利用FPGA+DSP(高速數(shù)字信號(hào)處理器+現(xiàn)場(chǎng)可編程邏輯門(mén)陣列),在傳統(tǒng)的并行頻率捕獲算法中加入相干降采樣模塊,當(dāng)信號(hào)進(jìn)行載波剝離和偽碼剝離后,通過(guò)降低采樣頻率的方式減小傅里葉變換需要處理的數(shù)據(jù)量,再對(duì)衛(wèi)星信號(hào)進(jìn)行三維搜索。結(jié)果表明,理論上所提算法計(jì)算量減少了80%以上,對(duì)實(shí)際北斗信號(hào)進(jìn)行捕獲時(shí),平均每顆星的捕獲時(shí)間為9.95 ms,內(nèi)存資源消耗相比于傳統(tǒng)并行頻率捕獲算法減少了42%。因此,新算法能在節(jié)約資源的同時(shí)有效提高捕獲速度,可為進(jìn)一步提高軟件接收機(jī)的捕獲性能提供參考。
關(guān)鍵詞: 測(cè)試計(jì)量?jī)x器;北斗;快速捕獲;相干降采樣;現(xiàn)場(chǎng)可編程邏輯門(mén)陣列(FPGA);數(shù)字信號(hào)處理器(DSP)
中圖分類(lèi)號(hào):TN967.1文獻(xiàn)標(biāo)識(shí)碼: A
doi:10.7535/hbkd.2020yx06001
Design and implementation of BeiDou signal fast
acquisition algorithm based on FPGA+DSP
GAO Chang, CHEN Zewang, ZENG Qingxi, LYU Chade
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing, Jiangsu 211106,China)
In BeiDou satellite receiver, a fast BeiDou signal acquisition algorithm based on coherent down-sampling was proposed to solve the problem that the large amount of data to be processed by the Fourier transform affects the acquisition speed of satellite signals in the traditional parallel frequency acquisition algorithm. On the basis of FPGA+DSP (field-programmable gate arrays+digital signal processors), the coherent down-sampling module was added to the traditional parallel frequency acquisition algorithm, and after the carrier and pseudo random code were stripped, the sampling frequency was reduced to decrease the number of points to be processed in the Fourier transform, and then a three-dimensional search for the satellite signal was performed. Theoretical analysis shows that the algorithm can reduce the amount of calculation by more than 80%; the experiments on the actual BeiDou signal indicate that the average acquisition time of each star is 9.95 ms, and the memory resource consumption is reduced by 42% compared with the traditional parallel frequency acquisition algorithm. This algorithm can effectively improve the acquisition speed while saving resources, which can provide reference for further improving the acquistition performance of the software receiver.
testing and measuring instruments; BeiDou; fast acquisition; coherent down-sampling; field-programmable gate arrays(FPGA); digital signal processor(DSP)
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)是中國(guó)研制的全球衛(wèi)星導(dǎo)航系統(tǒng),致力于為全球用戶提供穩(wěn)定可靠的衛(wèi)星導(dǎo)航服務(wù)[1-3]。信號(hào)捕獲是衛(wèi)星接收機(jī)中的關(guān)鍵技術(shù),用于搜索所有可見(jiàn)衛(wèi)星并獲得偽碼相位和多普勒頻移的粗略值[4-9]。衛(wèi)星信號(hào)的捕獲速度是評(píng)價(jià)接收機(jī)性能的重要指標(biāo)。
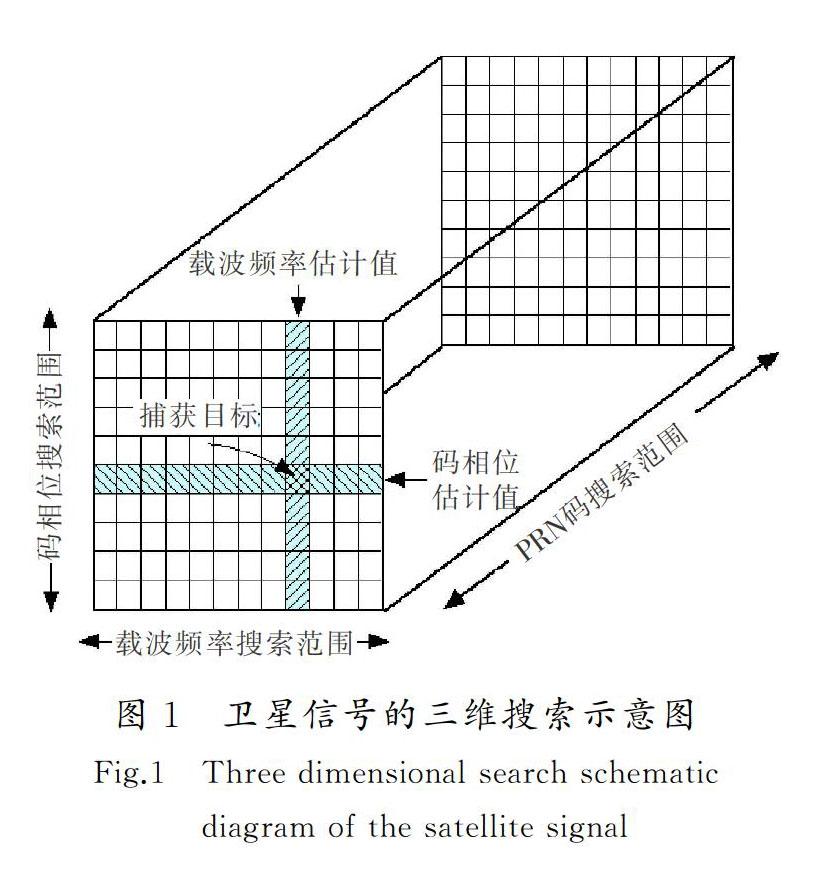
衛(wèi)星信號(hào)的捕獲就是對(duì)信號(hào)的三維搜索,即分別從PRN碼、偽碼相位和多普勒頻移的方向進(jìn)行搜索[10]。搜索過(guò)程如圖1所示,每一小格的橫向長(zhǎng)度代表偽碼相位搜索的步進(jìn)值,一般取0.5個(gè)碼片[11];每一小格的縱向長(zhǎng)度代表載波頻率搜索的步進(jìn)值,一般取500 Hz。傳統(tǒng)的串行捕獲利用時(shí)域相關(guān)器在每一個(gè)PRN碼上對(duì)信號(hào)的載波頻率和碼相位進(jìn)行掃描式的二維搜索,其實(shí)現(xiàn)起來(lái)比較簡(jiǎn)單,且具有良好的捕獲靈敏度,但是因?yàn)椴煌d波頻率和碼相位的組合很多,導(dǎo)致該方法的搜索范圍大。此外,對(duì)于每一個(gè)碼相位和多普勒頻移的組合,其積分時(shí)間固定,捕獲時(shí)間長(zhǎng)[12]。
為了實(shí)現(xiàn)衛(wèi)星信號(hào)的快速捕獲,國(guó)內(nèi)外學(xué)者提出了一系列基于頻域的捕獲算法。傳統(tǒng)并行捕獲算法有并行頻率法和并行碼相位法。并行頻率法只需要對(duì)偽碼相位進(jìn)行遍歷,減少了捕獲時(shí)間,但是算法的并行性不夠高,需要循環(huán)遍歷的次數(shù)多,捕獲效率低[13-15]。并行碼相位法只對(duì)載波頻率進(jìn)行遍歷,具有很好的并行性,但是其結(jié)構(gòu)復(fù)雜,采樣頻率選擇有限且在搜索每個(gè)載波頻率點(diǎn)時(shí)需要進(jìn)行2次傅里葉變換和1次傅里葉逆變換,運(yùn)算量大,影響了衛(wèi)星信號(hào)的捕獲速度[16]。LIU等[17]提出了一種基于匹配濾波器和FFT(PMF-FFT)的捕獲方法,利用偽碼的自相關(guān)函數(shù)特性,在時(shí)域和頻域2個(gè)維度同時(shí)對(duì)信號(hào)進(jìn)行并行處理,該算法硬件實(shí)現(xiàn)簡(jiǎn)單,但是頻率分辨率低。XIA等[18]提出了一種改進(jìn)的PMF-FFT捕獲方法,利用信號(hào)失鎖前獲得的多普勒頻移值將捕獲目標(biāo)的范圍縮小,并且用DFT代替FFT,解決了捕獲精度與硬件復(fù)雜度之間的矛盾,實(shí)現(xiàn)了高動(dòng)態(tài)衛(wèi)星信號(hào)的捕獲,但是相關(guān)輸出峰值有較大的衰減。RAO等[19]利用信號(hào)在頻域的稀疏特性,提出了基于稀疏傅里葉變換(SFT)的捕獲方法,并分析了降采樣因子對(duì)捕獲速度的影響,該方法的計(jì)算復(fù)雜度隨著參與運(yùn)算信號(hào)長(zhǎng)度的增加顯著下降,但是SFT的實(shí)現(xiàn)較為復(fù)雜,且在降采樣因子選取不合適時(shí),結(jié)果誤差較大。王凱等[20]提出了基于壓縮感知改進(jìn)的部分匹配濾波-快速傅里葉變換(CSPMF-FFT)算法,該算法減少了相關(guān)器的數(shù)目和FFT的運(yùn)算量,節(jié)約了硬件資源,但是存在折疊噪聲問(wèn)題,影響了檢測(cè)概率,而且在壓縮比超過(guò)15時(shí),重構(gòu)概率會(huì)迅速降低到80%以下。
綜上所述,現(xiàn)有的快速捕獲算法都需要用到傅里葉變換且參與傅里葉變換的數(shù)據(jù)點(diǎn)數(shù)很多。針對(duì)這一問(wèn)題,本文提出了加入相干降采樣的并行頻率捕獲算法,在信號(hào)被剝離了碼相位后先通過(guò)相干降采樣模塊再進(jìn)行傅里葉變換。該算法降低了采樣頻率,使參與傅里葉變換的點(diǎn)數(shù)減少,減少了程序的運(yùn)算量,節(jié)約資源的同時(shí)有效提高了捕獲速度。
1 北斗信號(hào)結(jié)構(gòu)
北斗信號(hào)采用碼分多址(CDMA)方式,所有衛(wèi)星發(fā)射具有相同載波頻率的導(dǎo)航信號(hào),通過(guò)偽隨機(jī)碼將共享相同載頻的信號(hào)區(qū)分開(kāi)。北斗信號(hào)是在載波上調(diào)制了偽隨機(jī)碼和導(dǎo)航電文的信號(hào),調(diào)制方式為QPSK[21]。北斗B1信號(hào)是以下3種信號(hào)的組合:1)載波信號(hào),頻點(diǎn)在1 561.098 MHz的正弦信號(hào),作為信號(hào)載體;2)偽隨機(jī)碼,有一定周期、取值為0和1的離散碼序列,是識(shí)別衛(wèi)星信號(hào)源自哪顆衛(wèi)星的標(biāo)識(shí),同時(shí)也對(duì)初始信號(hào)進(jìn)行了展寬。北斗B1信號(hào)的偽碼速率為2.046 MHz,碼長(zhǎng)為2 046個(gè)碼片;3)導(dǎo)航電文,包括星歷信息、歷書(shū)信息、衛(wèi)星時(shí)鐘相對(duì)系統(tǒng)時(shí)的修正參數(shù)和其他導(dǎo)航服務(wù)參數(shù)。北斗系統(tǒng)中加入了neumann-hoffman(NH)碼對(duì)載波進(jìn)行同步調(diào)制。北斗衛(wèi)星的導(dǎo)航電文原始比特率為50 bit/s,經(jīng)NH碼調(diào)制后數(shù)據(jù)比特率變?yōu)? 000 bit/s。所以北斗B1信號(hào)的表達(dá)式為
sj(t)=AjB1CjB1(t)DjB1(t)exp[i(2π(fIF+fd)t+φj0)],
式中:j為PRN碼;AjB1為信號(hào)振幅;CjB1(t)為偽隨機(jī)碼;DjB1(t)為導(dǎo)航電文;fIF為載波頻率;fd為多普勒頻移;φj0為初始載波相位。
接收天線可以將衛(wèi)星發(fā)射的電磁波信號(hào)轉(zhuǎn)換為電壓信號(hào)或電流信號(hào),隨后將信號(hào)送入射頻前端進(jìn)行處理。在經(jīng)過(guò)射頻前端模塊中前置濾波器和前置放大器的處理后,信號(hào)變?yōu)轭l率較低、載噪比較高的中頻信號(hào),再經(jīng)過(guò)A/D轉(zhuǎn)換器的采樣,得到的中頻數(shù)字信號(hào)表達(dá)式為
sj(n)=AjB1CjB1(n)DjB1(n)exp[i(2π(fIF+fd)n+φj0)]+w(n),
式中:w(n)為雙邊功率譜密度是N0/2時(shí)的加性高斯白噪聲。
2 基于相干降采樣的快速捕獲算法
2.1 算法原理
基于相干降采樣的捕獲算法實(shí)現(xiàn)框圖如圖2所示。其信號(hào)處理過(guò)程簡(jiǎn)述如下:第1步,將輸入信號(hào)與本地載波信號(hào)相乘,實(shí)現(xiàn)數(shù)字下變頻;第2步,信號(hào)和本地偽碼信號(hào)相乘,完成偽碼剝離;第3步,進(jìn)行相干降采樣,將采樣后得到的信號(hào)進(jìn)行離散傅里葉變換(DFT);第4步,對(duì)DFT得到的結(jié)果取模,并對(duì)結(jié)果進(jìn)行門(mén)限判決,若結(jié)果大于設(shè)定門(mén)限值,說(shuō)明捕獲成功。
對(duì)輸入的中頻信號(hào)進(jìn)行載波剝離。將輸入信號(hào)與本地載波相乘,從而使輸入信號(hào)下變頻到零中頻信號(hào)。以某顆北斗衛(wèi)星為例,只考慮其B1I分支信號(hào),表達(dá)式為
s(n)=AC(n)D(n)exp[i(2π(fIF+fd)n+φ0)]+w(n),
式中:A為信號(hào)振幅;C(n)為C/A碼;D(n)為導(dǎo)航電文比特;fIF為載波中頻頻率;fd為多普勒頻移;φ0為初始載波相位;w(n)為白噪聲分量,表示為
w(n)=wI(n)+iwQ(n),
其中wI(n)和wQ(n)分別代表在I支路和Q支路上均值為零且互不相關(guān)的正態(tài)噪聲,它們的信號(hào)功率為σ2n。
輸入數(shù)字中頻信號(hào)經(jīng)過(guò)和本地載波相乘的復(fù)下變頻操作后,得到零中頻數(shù)字信號(hào),其表達(dá)式為
s0(n)=s(n)exp[-i(2πfIF)n]=AC(n)D(n)exp[i(2πfdn+φ0)]+w(n)。
對(duì)零中頻數(shù)字信號(hào)進(jìn)行剝離偽碼的操作,其結(jié)果為
s1(n)=s0(n)C(n-m)=AR(m)D(n)exp[i(2πfdn+φ0)]+w(n),
式中:R(m)=C(n)C(n-m),其中m為本地偽碼的碼相位。北斗B1信號(hào)碼長(zhǎng)為2 046個(gè)碼片,m=0,1,…,2 045。在信號(hào)捕獲過(guò)程中,可以通過(guò)改變本地偽碼的m值使本地偽碼與捕獲信號(hào)的偽碼對(duì)齊。當(dāng)本地偽碼與捕獲信號(hào)的偽碼相位對(duì)齊時(shí),即m=0時(shí),有
R(m)=R(0)=1。
對(duì)完成載波剝離和偽碼剝離后的信號(hào)進(jìn)行采樣頻率為fS的相干降采樣,即相當(dāng)于對(duì)離散信號(hào)s1(n)的每M個(gè)點(diǎn)取1個(gè)平均值得到采樣后的離散信號(hào)x(k),其表達(dá)式為
x(k)=1M∑M(k+1)n=Mks1(n)=1MTS∫MTS(k+1)MTSk
s1(t)dt=[DW]Asin(πfdMTS)MπfdTS
exp[i(2πfdMTSk+πfdMTS+φ)]+w(k),
式中TS為采樣周期,TS=1/fS。
在相干降采樣的過(guò)程中,I,Q支路的噪聲特性沒(méi)有發(fā)生變化,但是其平均功率變?yōu)?/p>
σ2wI=σ2wQ=12 σ2nM 。
通過(guò)DFT對(duì)信號(hào)進(jìn)行頻譜分析,首先對(duì)無(wú)限長(zhǎng)信號(hào)序列進(jìn)行加窗處理,將信號(hào)與矩形窗函數(shù)相乘,得到
x′(k)=x(k)rect(MTSL)=
AR(m)sin(πfdMTS)MπfdTSexp[i(2πfdt+πfdMTS+φ)]·
∑+∞k=-∞δ(t-MTSk)rect(tMTSL)。
將時(shí)域信號(hào)x′(k)轉(zhuǎn)換為頻域信號(hào)X(f),表示為
X(f)=AR(m)sin(πfdMTS)MπfdTS·[12πδ(2πf-2πfd)]·
[2πMTS∑+∞k=-∞δ(2πf-k2πMTS)]·[MTSLsinc(MTSLf)]=
AR(m)Lsinc(MTSfd)·[δ(2πf-2πfd)]·
[∑+∞k=-∞δ(2πf-k2πMTS)]·sinc(MTSLf)。
對(duì)無(wú)限長(zhǎng)的頻域信號(hào)X(f)進(jìn)行離散加窗,得到
y(k)=X(f)∑∞k=-∞δ(f-kΔf)rect(MTSf)=
X(f)∑1/(2MTS)k=-1/(2MTS)δ(f-kΔf)。
在DFT過(guò)程中,噪聲平均功率下降為σ2,其表達(dá)式為
σ2=σ2yI(k)=σ2yQ(k)=12
σ2nML 。
對(duì)DFT結(jié)果取模,得到
Y(k)=|y(k)|=yI(k)L 2+
yQ(k)L 2 。
Y(k)屬于萊斯分布,根據(jù)其概率密度分布曲線fn(z),由虛警率Pfa唯一確定捕獲門(mén)限Vt,表示為
Pfa=∫+∞Vtfn(z)dz=
∫∞Vtzσ2e-z22σ2dz=
e-V2t2σ2,
Vt=σ-2ln Pfa 。
Y(k)的噪聲分布屬于瑞利分布,根據(jù)其概率密度分布曲線fs(z)和設(shè)定好的門(mén)限值Vt,可以求出信號(hào)的檢測(cè)概率為
Pd=∫+∞Vtfs(z)dz。
2.2 算法性能分析
為了分析本文提出的捕獲算法的性能,將傳統(tǒng)并行頻率捕獲算法作為比較對(duì)象[22]。設(shè)置多普勒頻移的搜索范圍為[-10 kHz,10 kHz],偽碼相位的搜索范圍為2 046個(gè)碼片。若以500 Hz的頻率步進(jìn)值和1碼片的碼相位步進(jìn)值進(jìn)行捕獲,則可以計(jì)算得到傳統(tǒng)并行頻率算法和L點(diǎn)降采樣并行頻率算法捕獲過(guò)程所需要的計(jì)算量。以N點(diǎn)的采樣深度計(jì)算,得到2種算法的運(yùn)算量如表1所示。
由表1計(jì)算可知,取4 096點(diǎn)數(shù)據(jù)作64點(diǎn)DFT運(yùn)算時(shí),即N=4 096, L=64時(shí),基于相干降采樣的并行頻率捕獲算法比傳統(tǒng)的并行頻率捕獲算法在乘法計(jì)算量和加法計(jì)算量上都減少了80%以上。
對(duì)北斗B1信號(hào)進(jìn)行5 000次蒙特卡洛實(shí)驗(yàn),以虛警率為橫軸、檢測(cè)概率為縱軸繪制受試者工作特征曲線(ROC曲線),分別采用傳統(tǒng)并行頻率捕獲算法、L=64點(diǎn)相干降采樣捕獲法和L=32點(diǎn)降采樣捕獲法進(jìn)行測(cè)試,得到曲線如圖3所示。由圖3可知,與傳統(tǒng)并行頻率捕獲算法相比,加入相干降采樣模塊后的捕獲算法檢測(cè)概率有所降低。這是因?yàn)榧尤胂喔山挡蓸幽K后,得到的相關(guān)峰值結(jié)果低于傳統(tǒng)并行頻率捕獲算法的峰值結(jié)果。當(dāng)虛警率為0.1時(shí),基于相干降采樣的捕獲算法相比傳統(tǒng)并行頻率捕獲算法其檢測(cè)概率僅下降0.1%。因此,本文提出的改進(jìn)的并行頻率捕獲算法具有較好的捕獲性能。
3 算法的FPGA+DSP實(shí)現(xiàn)
3.1 FPGA+DSP實(shí)現(xiàn)框架
由于基于FPGA+DSP的信號(hào)處理系統(tǒng)具有良好的并行處理能力,可以滿足北斗B1信號(hào)快速捕獲對(duì)實(shí)時(shí)性的要求,所以選擇采用FPGA+DSP實(shí)現(xiàn)北斗B1信號(hào)的捕獲。
基于FPGA+DSP的設(shè)計(jì)如圖4所示。從天線進(jìn)來(lái)的信號(hào)經(jīng)過(guò)射頻前端和低噪聲放大后進(jìn)入A/D通道,采樣得到數(shù)字信號(hào)后送入FPGA內(nèi)進(jìn)行捕獲,F(xiàn)PGA記錄每一通道的捕獲結(jié)果并給DSP發(fā)送捕獲完成標(biāo)志位。DSP通過(guò)地址總線和數(shù)據(jù)總線從FPGA中讀取數(shù)據(jù),對(duì)各通道的捕獲結(jié)果進(jìn)行門(mén)限判決。捕獲系統(tǒng)采用12通道并行處理方式,每個(gè)通道的捕獲實(shí)現(xiàn)分為載波剝離、偽碼剝離、峰值檢測(cè)和門(mén)限判決4部分。
3.2 載波剝離
通過(guò)本地載波信號(hào)和輸入數(shù)字中頻信號(hào)相關(guān)實(shí)現(xiàn)載波剝離。圖5為載波剝離部分的實(shí)現(xiàn)框圖,其中U1為載波NCO模塊,U2為數(shù)字下變頻模塊。載波NCO模塊的輸入為和中頻數(shù)字信號(hào)中心頻率相對(duì)應(yīng)的頻率控制字,產(chǎn)生2路頻率可調(diào)節(jié)的正交信號(hào)cos_I和sin_Q。數(shù)字下變頻模塊用于完成對(duì)輸入信號(hào)載波的剝離,利用本地載波產(chǎn)生的2路相互正交的信號(hào)與輸入的2路正交的采樣信號(hào)相乘,將原有的數(shù)字中頻復(fù)信號(hào)的載波剝離,只剩下基帶調(diào)制的零中頻數(shù)字信號(hào)。
3.3 偽碼剝離部分
通過(guò)本地偽碼與零中頻信號(hào)相關(guān)實(shí)現(xiàn)偽碼剝離,在信號(hào)被剝離偽碼后通過(guò)相干降采樣的方式對(duì)信號(hào)進(jìn)行采樣,對(duì)采樣結(jié)果進(jìn)行DFT。圖6為偽碼剝離部分的實(shí)現(xiàn)框圖,其中:U3為DCM模塊;U4為本地偽碼產(chǎn)生模塊;U5為相干降采樣模塊;U6為DFT實(shí)現(xiàn)模塊。
DCM模塊產(chǎn)生各個(gè)模塊的工作時(shí)鐘。本地偽碼產(chǎn)生模塊根據(jù)當(dāng)前通道捕獲的目標(biāo)PRN碼生成相應(yīng)的偽碼序列,然后根據(jù)碼相位的搜索碼片位置調(diào)整輸出的偽碼相位。實(shí)時(shí)采集2 ms的采樣數(shù)據(jù)進(jìn)行捕獲處理,則有4 092個(gè)點(diǎn)進(jìn)入相干降采樣模塊,首先將4 092點(diǎn)補(bǔ)零至4 096點(diǎn),然后取M=64對(duì)信號(hào)進(jìn)行降采樣,將得到的降采樣結(jié)果輸入DFT模塊。DFT模塊在主時(shí)鐘的驅(qū)動(dòng)下,每獲得1點(diǎn)降采樣數(shù)據(jù)便對(duì)其進(jìn)行1次64點(diǎn)DFT,當(dāng)做完64點(diǎn)DFT時(shí),即可獲得完整的64點(diǎn)DFT結(jié)果。
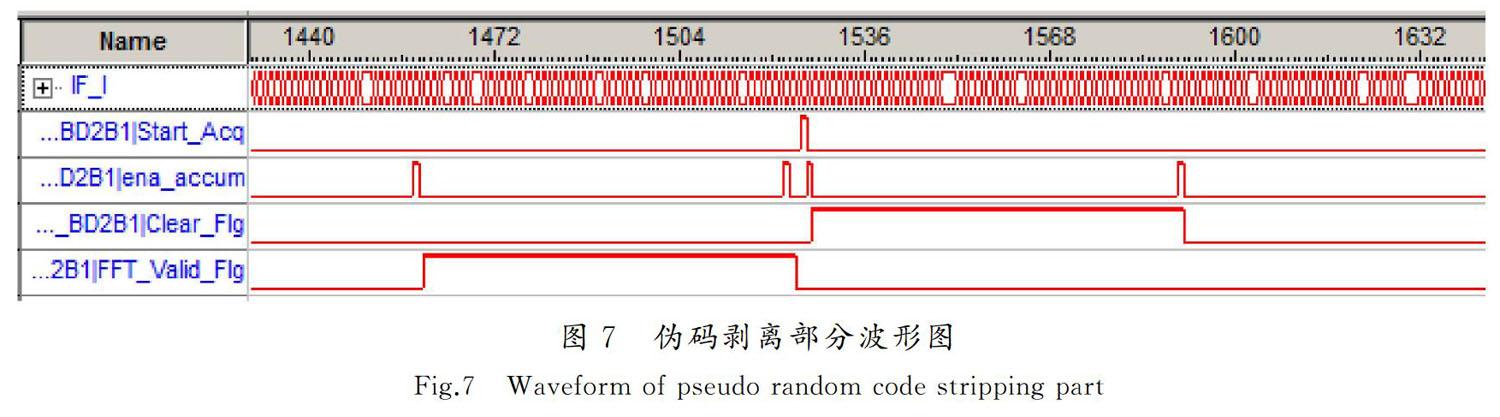
通過(guò)FPGA片上debug工具SignalTap觀察波形,結(jié)果如圖7所示。圖中Start_Acq為DSP控制的捕獲開(kāi)始標(biāo)志位;ena_accum為相干降采樣累加使能標(biāo)志位,控制64點(diǎn)累加;Clear_Flg為清零標(biāo)志位,控制累加結(jié)果清零;FFT_Valid_Flg為DFT完成標(biāo)志位,為1時(shí)說(shuō)明已經(jīng)完成4 096點(diǎn)的處理,可以進(jìn)行峰值檢測(cè)。
3.4 峰值檢測(cè)部分
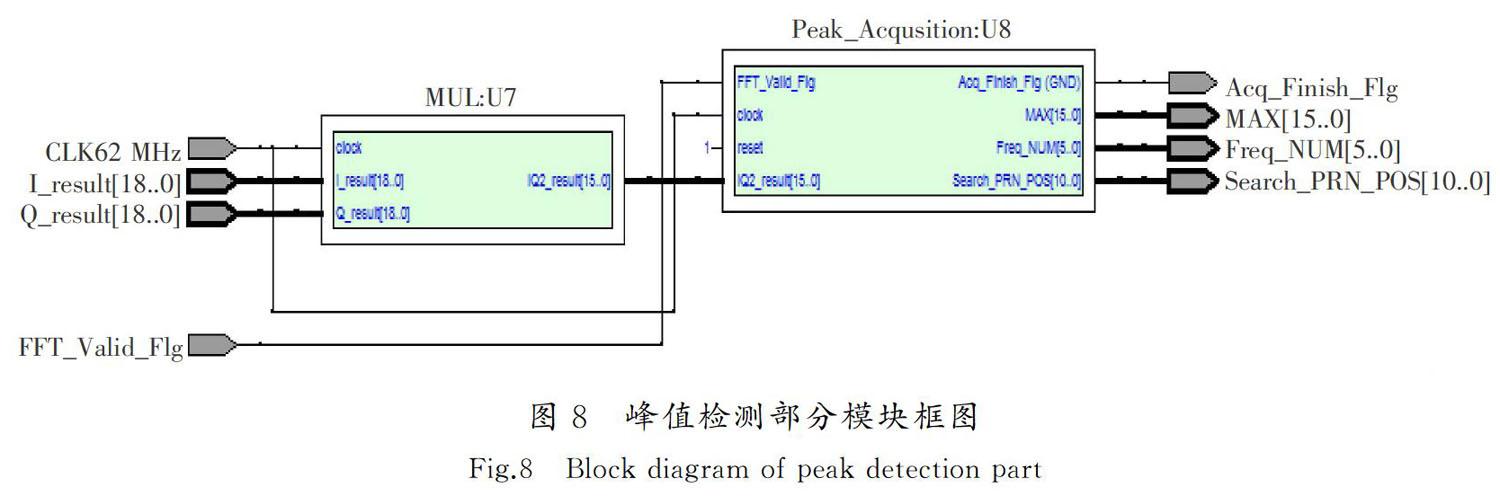
峰值檢測(cè)部分負(fù)責(zé)遍歷DFT峰值結(jié)果,得到捕獲檢測(cè)值。取碼相位搜索步進(jìn)值為1個(gè)碼片,載波頻率搜索步進(jìn)值為500 Hz,循環(huán)搜索所有的偽碼相位和載波頻率,則可以得到每個(gè)搜索點(diǎn)對(duì)應(yīng)的峰值能量。遍歷得到的所有峰值,將DFT峰值結(jié)果中的最大值作為捕獲判決的檢測(cè)值,并記錄檢測(cè)值對(duì)應(yīng)的載波頻率和偽碼相位。在捕獲完成后,生成捕獲完成標(biāo)志位Acq_Finish_Flg發(fā)送給DSP。圖8為峰值檢測(cè)部分的實(shí)現(xiàn)框圖,其中:U7為乘法器模塊,負(fù)責(zé)計(jì)算DFT的峰值能量;U8為峰值檢測(cè)模塊,負(fù)責(zé)遍歷DFT峰值能量并記錄其最大值作為捕獲檢測(cè)值。
3.5 門(mén)限判決部分
DSP讀取捕獲完成標(biāo)志位Acq_Finish_Flg為1時(shí),對(duì)12通道的捕獲結(jié)果進(jìn)行門(mén)限判決,若檢測(cè)值大于門(mén)限值,說(shuō)明捕獲成功,否則說(shuō)明該通道沒(méi)有捕獲到該P(yáng)RN碼的衛(wèi)星。之后,DSP重新分配新的目標(biāo)PRN碼給FPGA的12個(gè)通道,將捕獲開(kāi)始標(biāo)志位Start_Acq置1,觸發(fā)下一輪的捕獲。
3.6 實(shí)驗(yàn)結(jié)果與分析
算法驗(yàn)證采用定制的GPSL1+BD2B1雙模衛(wèi)星導(dǎo)航開(kāi)發(fā)平臺(tái),實(shí)物圖如圖9所示。接收機(jī)基帶處理FPGA采用ALTERA公司的高性能芯片StratixII EP2S90F1020I4,DSP采用TI公司的高速浮點(diǎn)型處理器TMS320C6713。通過(guò)SignalTap截取一段對(duì)某顆北斗B1信號(hào)成功捕獲的數(shù)據(jù)如圖10所示。圖10中,Acq_Finish_Flg為捕獲完成標(biāo)志,MAX為峰值結(jié)果,F(xiàn)req_NUM為多普勒頻移,Search_PRN_POS為碼片位置。
表2為衛(wèi)星接收機(jī)采用快速捕獲算法2019-03-27T11:23在南京航空航天大學(xué)自動(dòng)化學(xué)院的樓頂對(duì)北斗B1信號(hào)的捕獲結(jié)果。在CCS3.3環(huán)境下,使用斷點(diǎn) 和Profile測(cè)試100次捕獲時(shí)間, 每次捕獲平均消耗時(shí)間為119.36 ms,由于捕獲模塊集成了12個(gè)通道并行捕獲,所以平均每顆星的捕獲時(shí)間為9.95 ms。通過(guò)Quartus II軟件查看片內(nèi)存儲(chǔ)資源占用情況,本文提出的算法占用的內(nèi)存資源為12%,相比于傳統(tǒng)的并行頻率捕獲算法減少了42%。
實(shí)驗(yàn)結(jié)果表明,基于相干降采樣的并行頻率捕獲算法能夠?qū)崿F(xiàn)對(duì)北斗B1信號(hào)的快速捕獲,且捕獲性能穩(wěn)定,消耗的內(nèi)存資源更小。
4 結(jié) 語(yǔ)
本文提出了一種新的捕獲算法,在傳統(tǒng)的并行頻率捕獲算法中加入相干降采樣模塊, 通過(guò)理論分析說(shuō)明了該算法的計(jì)算量比傳統(tǒng)并行頻率捕獲算法計(jì)算量減少了80%以上,并通過(guò)FPGA+DSP驗(yàn)證了算法的可行性,平均捕獲每顆星的時(shí)間為9.95 ms,與傳統(tǒng)并行頻率捕獲算法相比, 該算法的內(nèi)存資源消耗減少了42%,可以實(shí)現(xiàn)北斗信號(hào)的快速捕獲。
本文雖然只討論了一個(gè)北斗B1信號(hào)的情況,但只需要調(diào)整本地振蕩器的頻率、采樣點(diǎn)數(shù)和相干積分時(shí)間等相關(guān)參數(shù),所提出的算法和硬件實(shí)現(xiàn)框架就可以適用于其他衛(wèi)星信號(hào),包括GPS,Galileo,GLONASS和其他GNSS信號(hào)。
盡管本文通過(guò)引入相干降采樣的方式提高了捕獲速度,但是并沒(méi)有提高衛(wèi)星信號(hào)的捕獲精度。接下來(lái)的研究將針對(duì)高動(dòng)態(tài)和高靈敏度的衛(wèi)星信號(hào)進(jìn)行研究,以期進(jìn)一步提高軟件接收機(jī)的捕獲性能,讓軟件接收機(jī)快速捕獲算法能夠真正應(yīng)用于工程領(lǐng)域。
參考文獻(xiàn)/References:
[1]劉瑞華, 董立堯, 翟顯. 北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號(hào)用戶測(cè)距誤差計(jì)算方法研究[J]. 中國(guó)空間科學(xué)技術(shù), 2017, 37(4):41-48.
LIU Ruihua, DONG Liyao, ZHAI Xian. Research on calculation method of signal in space user range error for BeiDou Navigation Satellite System[J]. Chinese Space Science and Technology, 2017, 37(4):41-48.
[2]BHUIYAN M Z H, SDERHOLM S, THOMBRE S, et al. Overcoming the challenges of BeiDou receiver implementation[J]. Sensors, 2014, 14(11):22082-22098.
[3]王博, 焦海松, 谷慶,等. 北斗接收機(jī)動(dòng)態(tài)定位精度測(cè)試與分析[J]. 導(dǎo)航定位學(xué)報(bào), 2014, 2(2):109-112.
WANG Bo, JIAO Haisong, GU Qing, et al. Dynamic accuracy testing and analysis for BeiDou receiver[J]. Journal of Navigation and Positioning, 2014, 2(2):109-112.
[4]HU Zhiming, ZHANG Bo, LU Jinjian. FPGA implementation of stepping correlation acquisition algorithm for BeiDou II B1 signal[C]//2019 6th International Conference on Dependable Systems and Their Applications (DSA).[S.l.]:[s.n.],2020. doi:10.1109/DSA.2019.00049.
[5]LI Rongbing, HAN Zhifeng, LIU Jianye, et al. A high-sensitivity acquisition algorithm for BeiDou signals with NH code[J]. Journal of Navigation, 2019, 72(6):1-15.
[6]RAKIPI A, KAMO B, CAKAJ S, et al. GPS signal acquisition and sensitivity analysis using different algorithms on a software receiver[C]//International Conference on Computational Intelligence. Riga: IEEE, 2015: 97-102.
[7]AZEEM U, AYUSH K D. Noise analysis on auto correlation of GPS coarse acquisition code[C]//International Conference on Communication & Network Technologies. [S.l.]:IEEE, 2015: 178-181.
[8]ZHU Can, FAN Xiangning. A novel method to extend coherent integration for weak GPS signal acquisition[J]. IEEE Communications Letters, 2015, 19(8):1343-1346.
[9]AHAMED S F, LAVETI G, GOSWAMI R, et al. Fast acquisition of GPS signal using Radix-2 and Radix-4 FFT algorithms[C]//IEEE International Conference on Advanced Computing. [S.l.]: IEEE, 2016: 674-678.
[10]TANG Yinyin, GUO Xiye, WANG Yueke, et al. High-sensitive acquisition of signals for inter-satellite links of navigation constellation[J]. Electronics Letters, 2015, 51(23):1879-1880.
[11]王爾申, 張晴, 雷虹,等. GPS空間信號(hào)可用性評(píng)估算法[J]. 電光與控制, 2017,24(2):39-42.
WANG Ershen, ZHANG Qing, LEI Hong, et al. Evaluation algorithm of GPS signal in space availability[J]. Electronics Optics and Control, 2017(2): 39-42.
[12]LECLERE J, CYRIL B, LANDRY R J, et al. FFT splitting for improved FPGA-based acquisition of GNSS signals[J]. International Journal of Navigation and Observation, 2015(2):1-12.
[13]LEIBOVICH P E, JUAN G D, JAVIER G G, et al. Dedicated hardware for FFT based fast acquisition of GNSS signals[C]//2015 IEEE 6th Latin American Symposium on Circuits & Systems (LASCAS). [S.l.]: IEEE, 2015.doi: 10.1109/LASCAS.2015.7250424.
[14]KIM B, KONG S H. Design of FFT-based TDCC for GNSS acquisition[J]. IEEE Transactions on Wireless Communications, 2014, 13(5):2798-2808.
[15]ZHANG Yanbin, LYU Weijun, YU Dunshan. A fast acquisition algorithm based on FFT for BOC modulated signals[C]//TENCON 2015-2015 IEEE Region 10 Conference. [S.l.]: IEEE, 2016. doi: 10.1109/TENCON.2015.7372893.
[16]SOGHOYAN A, SULEIMAN A, AKOPIAN D. A development and testing instrumentation for GPS software defined radio with fast FPGA prototyping support[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(8):2001-2012.
[17]LIU Chang, ZHANG Jun, ZHU Yanbo, et al. Analysis and optimization of PMF-FFT acquisition algorithm for high-dynamic GPS signal[C]//IEEE International Conference on Cybernetics & Intelligent Systems. [S.l.]: IEEE, 2011. doi: 10.1109/ICCIS.2011.6070325.
[18]XIA Xuan, ZHAO Jiankang, LONG Haihui, et al. Fractional Fourier transform-based unassisted tracking method for global navigation satellite system signal carrier with high dynamics[J]. IET Radar, Sonar and Navigation, 2016, 10(3):506-515.
[19]RAO M V G, RATNAM D V. Faster acquisition technique for software-defined GPS receivers[J]. Defence Science Journal, 2015, 65(1):5-11.
[20]王凱,吳斌,汪勃.一種利用壓縮感知改進(jìn)的PMF-FFT擴(kuò)頻捕獲算法[J].電訊技術(shù),2018,58(6):661-667.
WANG Kai,WU Bin,WANG Bo.An improved PMF-FFT spread spectrum signal acquisition algorithm based on compressed sensing[J].Telecommunication Engineering,2018,58(6):661-667.
[21]China Satellite Navigation Office. BeiDou Navigation Satellite Signal in Space Interface Control Document Open Service Signal Version 2.1 [M]. Beijing: China Standardization, 2016.
[22]魯郁. 北斗/GPS雙模軟件接收機(jī)原理與實(shí)現(xiàn)技術(shù)[M]. 北京:電子工業(yè)出版社,2016.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
