半掛車機械爬梯裝置的設計與研究
2020-12-24 03:02:18林成歡周新紅馮海青
專用汽車 2020年12期
關鍵詞:結構
林成歡 周新紅 馮海青
湖北三江航天萬山特種車輛有限公司 湖北孝感 432000
1 前言
爬梯裝置是在半掛車尾部與地面之間形成斜坡過渡的過渡裝置。借助爬梯裝置,輪式和履帶式車輛可以順利上下半掛車貨臺。爬梯裝置在運輸重型工程裝備的低平板半掛車上有廣泛運用,目前市面上的機械爬梯裝置或多或少都存在一些問題,主要有以下幾個方面;一是外形不美觀,細節粗糙;二是強度不足,市面上的機械爬梯裝置,經過一段時間的使用,普遍會出現較大的變形,變形位置主要集中于承載本體縱梁、面板和爬梯與車架連接結構處;三是操作費力,爬梯裝置的收回和放下都需操作人員手動操作,十分費力。因此,筆者通過對半掛車機械爬梯裝置的分析研究,總結研發了一套設計方法,并對機械爬梯裝置的復位彈簧機構進行了優化改進。
2 爬梯裝置總體布置設計
爬梯裝置由左右爬梯本體、復位彈簧機構和系留裝置等組成。
爬梯本體是爬梯裝置的承載結構,主要由縱梁、橫梁、支耳等結構組成。當爬梯本體放下時,可在半掛車尾部與地面之間形成斜坡過渡。根據爬梯本體分段數的不同,爬梯本體可分為單級爬梯和二級爬梯。
復位彈簧機構由壓縮彈簧、導向桿和支撐結構組成,彈簧兩端分別支撐在爬梯本體與車架尾部支耳上,在爬梯本體放下時彈簧受壓將爬梯勢能轉化成彈簧壓縮能而起到緩沖作用,在爬梯本體收起時彈簧則將壓縮能轉化為爬梯勢能而起助力作用,使爬梯本體收放平順、省力,改善爬梯裝置的操作性能。
機械爬梯裝置布置圖如圖1所示。
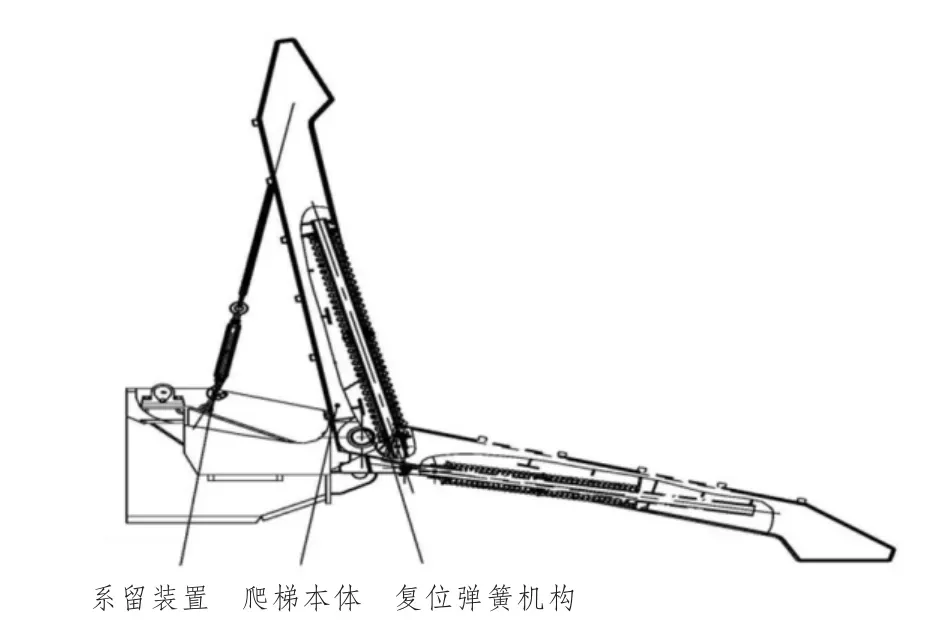
圖1 機械爬梯裝置布置圖
3 爬梯本體設計
3.1 縱向外形輪廓設計
爬梯本體設計時,首先需要根據爬梯安裝位置與斜坡角度要求,規劃其縱向外形輪廓,并兼顧復位彈簧機構的空間需求,為后續設計提供依據。根據爬梯本體斜坡面前端是否設置過渡斜坡,可將縱向外形輪廓分為3種,如圖2所示。
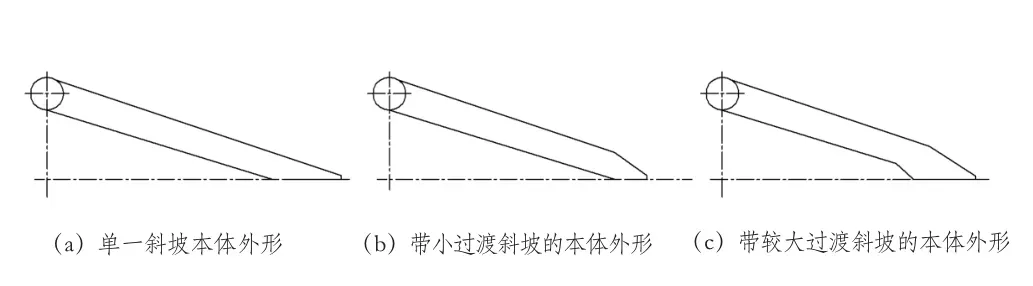
圖2 爬梯本體的縱向外形輪廓
a.單一斜坡本體外形。此種外形爬梯斜坡角度較小,長度較長,主要用于待裝載的車輛接近角較小或其車體長度很長的場合。因爬梯本體較長,此種外形結構通常需設計成二級爬梯結構,才能滿足掛車總高限制要求;
b.帶小過渡斜坡的本體外形。增加過渡斜坡可以截短爬梯本體長度,同時被裝載車輛采用牽引方式下車完畢時,不易壓住爬梯本體前端。此種外形結構主要用于掛車貨臺高度可調(貨臺低位裝載)或采用二級爬梯結構場合;
c.帶較大過渡斜坡的本體外形。此種外形特點與帶小過渡斜坡的本體外形相近,差別在于過渡斜坡更大,本體長度可以更短。此種外形結構主要用于掛車貨臺高度較高且要求必須采用單級爬梯結構場合。
對于爬梯本體長度較長,爬梯裝置收回后整車高度不滿足掛車總高限制要求的情況,爬梯本體需采用二級爬梯結構,二級爬梯的折疊方式有向前折疊和向后折疊二種。
a.向前折疊,如圖3所示。此種方式便于手動折疊,爬梯收起前,第二級爬梯已折疊,操作安全,收起過程中質心平穩,適用于機械爬梯;
b.向后折疊,如圖4所示。此種方式爬梯收起前二級爬梯無法提前折疊,只能在收起過程中折疊第二級爬梯,此方式適用于液壓爬梯。

圖3 向前折疊的二級機械爬梯示例

圖4 向后折疊的二級機械爬梯示
3.2 承載結構設計
爬梯本體承載結構主要采用箱形結構和框架式結構兩種結構形式。
a.箱形結構如圖5所示。與框架式結構相比,箱形結構外形簡潔,占用空間較小,但在相同承載能力條件下,其結構質量較大。為加強爬梯斜坡面承載能力,箱形結構內部需沿縱向設置多條加強筋,因空間有限,其焊接操作性不是很好。箱形結構主要用于對外觀要求較高的場合。
b.框架式結構如圖6所示。框架式結構爬梯本體一般由縱梁、橫梁和面板組成,當外觀要求不高且主要裝載履帶式車輛時也可以不設面板。框架式結構是爬梯本體通常采用的結構型式,一般有雙縱梁和三縱梁兩種布局形式。

圖5 采用箱形結構的爬梯示例

圖6 采用框架式結構的爬梯示例

圖7 采用三縱梁結構的爬梯本體示例
3.3 與車架連接結構設計
3.3.1 連接結構形式
爬梯本體與掛車尾端通過耳板-銷軸結構連接,根據銷軸數量不同,有單軸連接和多軸連接兩種型式。
a.單軸連接如圖8所示。此種結構采用一根通軸,將爬梯本體所有耳板與掛車尾端所有耳座連接在一起;
b.多軸連接如圖9所示。對于此種結構,本體上每一根縱梁均有一根銷軸與車架連接。 兩種結構中,單軸結構相對簡單,零件數量少,但結構質量較大,加工成本較高,裝配較困難。通常情況下爬梯本體應采用多軸結構,對于需要左右調節的爬梯裝置來說,則只能采用單軸結構。
由于爬梯裝置長期露天工作,粉塵較多,為確保爬梯收放順暢,其耳板與銷軸應采用大間距配合。當耳板與銷軸無相對轉動時,配合間距取0.5~
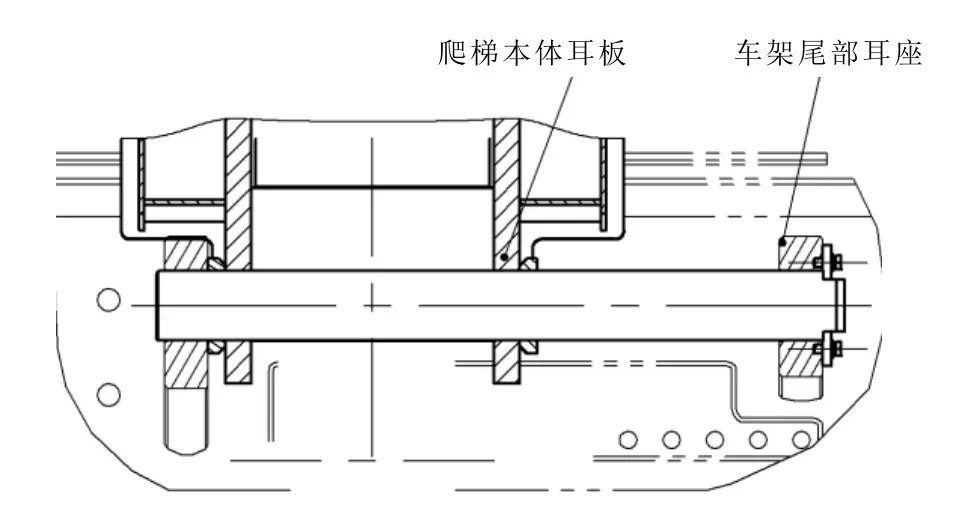
圖8 單軸連接結構示例
3.3.2 支耳結構設計
支耳設計時,其結構有整體耳板、耳板+單(雙)側環板和耳板+套管3種結構形式,如圖10所示。
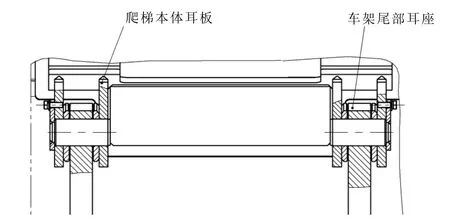
圖9 雙軸連接結構示例
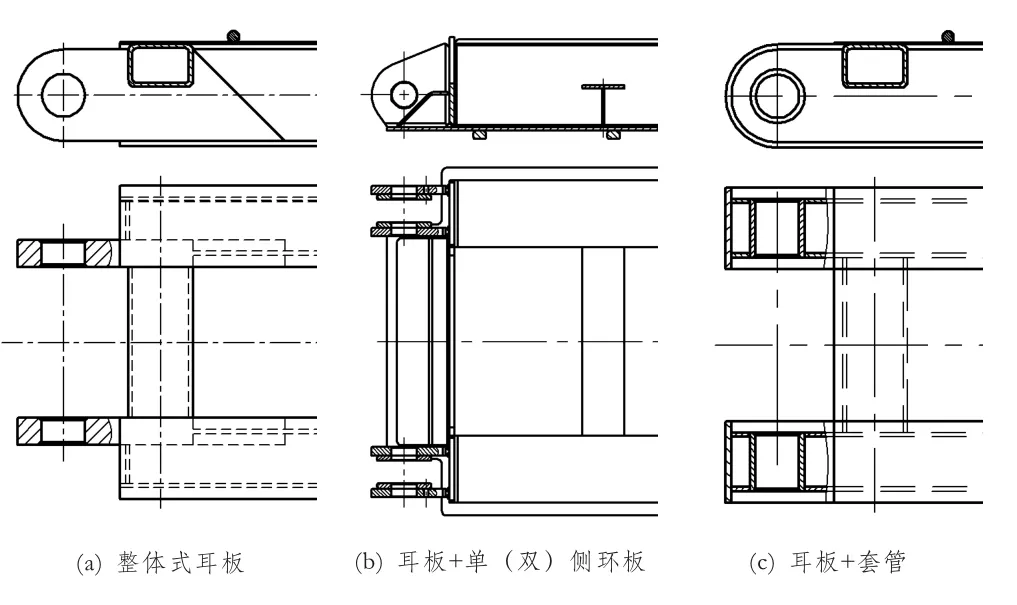
圖10 爬梯本體支耳結構類型示例
a.整體耳板結構。其結構簡單,但結構質量較大,主要用于采用單軸連接結構的爬梯本體;
b.耳板+單(雙)側環板結構。設計時,其耳板按強度需求選擇板厚,并設置單(雙)側環板滿足接觸應力需求,其結構質量小于整體式耳板,是爬梯支耳通常采用的結構形式;
c.耳板+套管。此種支耳實際上是縱梁的一部分,通過增加套管來滿足接觸應力需求,其結構質量最小,但因縱梁腹板厚度較小,其與套管連接處易出現應力集中,主要用于載荷較小的爬梯本體。
當支耳采用整體耳板和耳板+單(雙)側環板結構型式時,需考慮耳板與縱梁的連接結構。
a.當一根縱梁僅設置一塊支耳時,可將耳板與縱梁腹板沿斜向對拼焊接,確保耳板有足夠焊縫長度,如圖10 (a)所示;
b.當一根縱梁設置兩塊支耳時,因支耳間距需按車架尾部尺寸確定,耳板與縱梁腹板對正有困難,此時可在縱梁端部設置擋板,再在擋板上布置支耳,如圖10(b)所示,此種結構必須校核耳板焊縫強度。
4 復位彈簧機構設計
4.1 爬梯裝置收放力矩特性
壓縮彈簧的作用就是讓彈簧力矩匹配重力矩,使爬梯裝置能平穩落下和輕松收回,爬梯裝置的工作過程就是彈簧力矩和爬梯重力矩相互作用的過程。圖11為爬梯裝置彈簧力矩和爬梯重力矩的力矩特性圖,圖中縱坐標為爬梯重力矩和彈簧力矩,橫坐標為爬梯角度α,以爬梯本體與鉛垂方向的夾角表示。
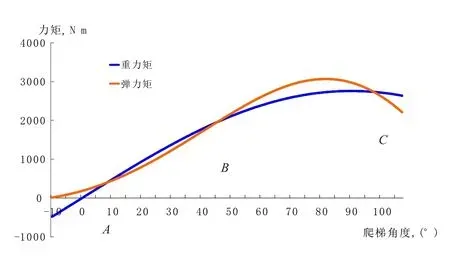
圖11 爬梯力矩特性圖
由圖11可知,爬梯裝置整個工作過程中彈簧力矩和爬梯本體重力矩有A、B、C3個平衡點,這3個平衡點將整個工作過程分為4個區域,現以爬梯裝置放下過程為例說明。A點之前,彈簧力矩大于重力矩,爬梯斜靠在車架尾部,需要操作力將爬梯推倒;AB之間,重力矩大于彈簧力矩,爬梯加速落下;BC之間,彈簧力矩大于重力矩,爬梯減速落下,會在BC段某處靜止,需操作力將爬梯放下;C點之后,重力矩大于彈簧力矩,爬梯落地靜止。
爬梯裝置收回和放下兩種工作過程在4個區域都需要操作力。操作力的大小等于彈簧力矩和爬梯重力矩的差值/操作力力臂,彈簧力矩和重力矩差值越小,操作力越小,爬梯裝置放下和收回越省力。
AB段的操作力力臂小于BC段操作力力臂,在操作力一定的情況下,BC段彈簧力矩和重力矩差值應大于AB段彈簧力矩和重力矩差值。
爬梯裝置收回后斜靠在車架尾部,沒有系留的情況下要保證爬梯不會在車輛啟動時落下,爬梯要以一定角度斜靠在車架上。半掛車啟動加速度較低,一般為0.15g左右,爬梯傾斜10°左右時即可保證爬梯不會在車輛啟動時落下,增加了爬梯裝置系留的可靠性。同時此傾斜角度推動爬梯所需的操作力也較為適中。
綜上所述,爬梯裝置工作過程的力矩特性應同圖11類似。
4.2 壓縮彈簧參數選取
圖12為爬梯裝置處于水平位置的點位示意圖,爬梯支點作為坐標原點,(X1,Z1)為彈簧固定支點坐標, (X2,Z2) 為彈簧運動支點參數,G1為爬梯本體質心,G2為彈簧和支撐桿質心。由于爬梯本體質量和質心已知,可得到長度LOG1和角度β。預估彈簧和支撐桿質量可以獲得長度LOG2和角度ε。
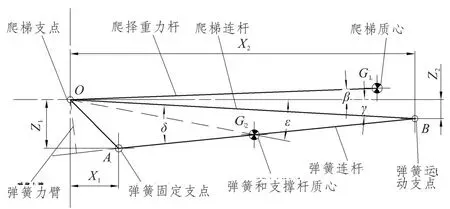
圖12 水平位置彈簧示意圖
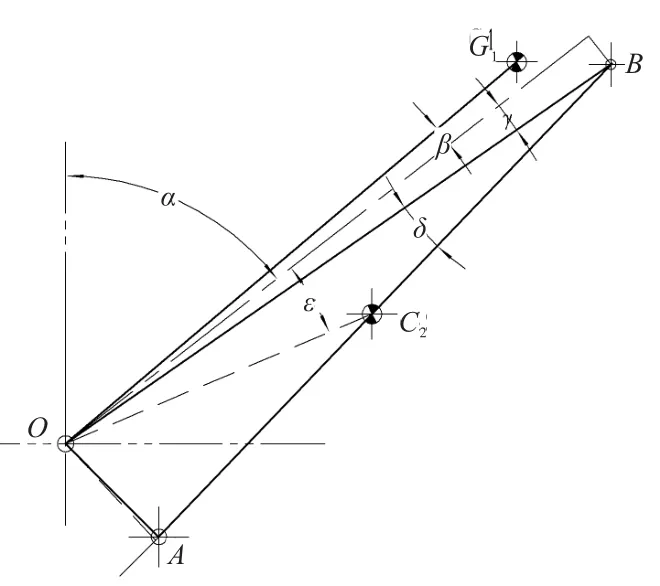
圖13 α角度位置彈簧示意圖
由圖12可計算出以下參數。
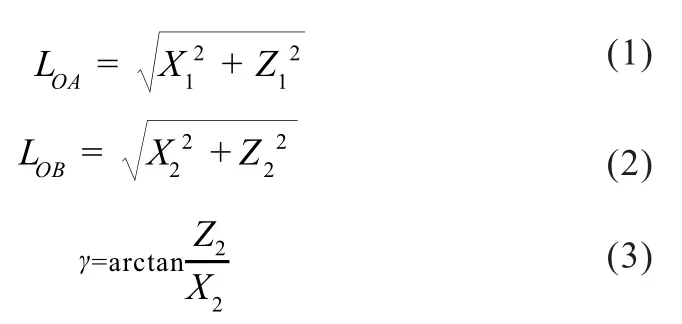
由圖13可計算出以下參數。
爬梯本體質心橫坐標:

彈簧和支撐桿質心橫坐標:

彈簧運動支點橫坐標:

彈簧運動支點縱坐標:

彈簧連桿長度:

解?OAB,求得角度δ值。
彈簧力臂:

由4.1可知,彈簧力矩和爬梯重力矩應符合圖11中的力矩特性,爬梯本體初步設計完成后,通過預估彈簧和支撐桿質量可以得到爬梯重力矩曲線,彈簧力矩與彈簧力臂、彈簧壓縮量和彈簧剛度相關;彈簧力臂和彈簧壓縮量由圖12(圖13)中的?OAB決定,在圖13中,B點往右移,彈簧壓縮量變大,反之變小;考慮到復位彈簧安裝機構安裝空間,X2值不宜過大,依據經驗初選X2為爬梯本體長度一半,X2初定為0。A點往右下角移動,彈簧力臂變大,反之變小;在滿足車架尾部安裝條件和整車離去角的情況下,X1、Z1盡量取大,從而初步確定X1、Z1初始值。
(X1、Z1) 、(X2、Z2) 取值依據計算結果可做相應調整,優先調整(X2、Z2) 值,且X2作為粗調,Z2作為微調。為了計算方便,假設α為0°時壓縮彈簧為自然狀態。
圖11的理想狀態即是彈簧力矩曲線和爬梯重力矩曲線完全重合,爬梯裝置在收回和放下過程中的任意角度位置彈簧力矩和爬梯重力矩平衡,整個工作過程中人所施加的操作力為0,可以達到完全省力的效果。
工作過程中每隔1°計算一次力矩平衡,可以計算出任意角度位置彈簧所需的剛度,由于選取的壓縮彈簧為單一剛度,故可以計算出所有角度位置的彈簧剛度值并取其均值作為壓縮彈簧理論剛度值。具體計算公式如下:

α角度位置彈簧力:
彈簧自由高度:

彈簧壓縮量:

彈簧剛度:

彈簧理論剛度:

彈簧壓縮行程:

彈簧最大工作負荷:

實際工作中,爬梯在0°位置時彈簧仍處于壓縮狀態,故彈簧實際自由高度應略大于理論計算值。爬梯裝置落地后,壓縮彈簧處于整個工作過程中的最大壓縮量和最大工作負荷狀態,為了防止地面不平導致彈簧壓縮量不夠,實際彈簧壓縮行程和最大工作負荷應大于理論計算值。
壓縮彈簧參數選取按以下步驟進行:
a. 根據彈簧最大工作負荷,按照標準GB/T 2089-2009選取彈簧線徑d、中徑D和標準節距t;
b. 根據彈簧理論剛度計算彈簧有效圈數;
c. 計算彈簧自由高度和彈簧壓縮行程;
d. 若彈簧自由高度和彈簧壓縮行程均符合要求,則選擇彈簧基本合格;若不符合要求,則需更改初始參數(X1、Z1) 、 (X2、Z2)值重新計算并選取彈簧參數直至符合要求。
4.3 壓縮彈簧參數和安裝點位優化
若選取彈簧判定為基本合格,則需將實際彈簧參數帶入公式中驗算,計算任意爬梯角度位置彈簧力矩和爬梯重力矩,并繪制同圖11的力矩特性圖。分析爬梯力矩特性圖,判斷力矩特性是否符合以下2個條件:
1.曲線特征。力矩曲線走勢應與圖11類似,有3個平衡位置4個工作區域,BC段彈簧力矩和爬梯重力矩差值大于AB段彈簧力矩和爬梯重力矩差值,爬梯角度為0時彈簧還有一定壓縮量。
2.操作力。操作力等于彈簧力矩和爬梯重力矩差值/操作力臂,分別計算A點之前、AB之間、BC之間、C點之后共4個區域的最大操作力(一般不大于20 kg)。
依據對比結果,對彈簧參數進行優化:
a.若力矩特性同時滿足第1、2條或僅滿足第2條,則彈簧參數和安裝點位合理,完成彈簧設計。
b.若力矩特性僅滿足第1條,首先須微調X2、Z2值使力矩特性滿足第2條,若仍不滿足,需按照彈簧參數選取步驟重新選擇彈簧線徑、中徑,直至力矩特性同時滿足第1、2條或僅滿足第2條。
c.若力矩特性同時不滿足第1、2條,則需從4.2開始重新設計彈簧安裝點位,重新選取壓縮彈簧參數,直至同時滿足第1、2條或僅滿足第2條。
5 結語
本文通過對當前市面上半掛車機械爬梯裝置的研究,對爬梯裝置本體承載結構設計進行了分析研究,指出了爬梯本體設計過程中應注意的問題,對壓縮彈簧的安裝點位和主要參數進行了分析和計算,發明了一種彈簧參數選取方法,優化了復位彈簧機構,使爬梯的放下和收回過程更省力。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50