基于雙頻識(shí)別聲吶的魚(yú)類(lèi)目標(biāo)識(shí)別與計(jì)數(shù)
2020-12-24 13:43:42朱振宏曹正良彭戰(zhàn)飛
漁業(yè)現(xiàn)代化 2020年6期
沈 蔚,朱振宏,張 進(jìn),曹正良,彭戰(zhàn)飛
(1 上海海洋大學(xué)海洋科學(xué)學(xué)院,上海河口海洋測(cè)繪工程技術(shù)研究中心,上海 201306;2 上海海洋大學(xué)海洋牧場(chǎng)工程技術(shù)研究中心,上海 201306)
水聲探測(cè)方法是當(dāng)前進(jìn)行水生生物研究的高效、快捷、可靠的方法,憑借其調(diào)查精度高、調(diào)查范圍廣、對(duì)環(huán)境無(wú)影響、對(duì)調(diào)查目標(biāo)無(wú)損害等優(yōu)點(diǎn),已大量應(yīng)用到魚(yú)類(lèi)資源的調(diào)查研究當(dāng)中[1-3]。在進(jìn)行魚(yú)類(lèi)資源評(píng)估過(guò)程中,使用各類(lèi)回聲探測(cè)儀獲取數(shù)據(jù),并利用回聲積分、回波計(jì)數(shù)等方法對(duì)采集到的水聲數(shù)據(jù)進(jìn)行處理與統(tǒng)計(jì)。近年來(lái),已有大量研究人員在海洋、湖泊、河流、水庫(kù)等水域?qū)⑺曁綔y(cè)方法運(yùn)用到魚(yú)類(lèi)資源研究當(dāng)中[4-8]。當(dāng)前常用的水聲探測(cè)主要是對(duì)魚(yú)類(lèi)目標(biāo)資源密度、空間分布等進(jìn)行研究,對(duì)于魚(yú)類(lèi)目標(biāo)運(yùn)動(dòng)軌跡追蹤、個(gè)體魚(yú)體信息提取等研究較少[9]。
雙頻識(shí)別聲吶(Dual-frequency Identification Sonar,DIDSON)能夠在渾濁、黑暗的水下環(huán)境顯示高清晰度的聲學(xué)圖像,廣泛應(yīng)用于水下管道檢測(cè)、水下搜尋、水下安防等多個(gè)方面[10]。在漁業(yè)資源管理方面,DIDSON主要用于河流、湖泊、水庫(kù)等內(nèi)陸水域的魚(yú)類(lèi)洄游計(jì)數(shù)、行為觀測(cè)等。Han等[11-12]利用DIDSON嘗試對(duì)洄游魚(yú)類(lèi)和養(yǎng)殖大型魚(yú)類(lèi)進(jìn)行計(jì)數(shù)和體長(zhǎng)提取;Handegard等[13]利用低通濾波算法對(duì)DIDSON采集聲學(xué)數(shù)據(jù)中不同密度下的單個(gè)魚(yú)體目標(biāo)進(jìn)行識(shí)別;童劍鋒等[14-15]對(duì)DIDSON形成的聲學(xué)圖像進(jìn)行初步研究,并用于溯河洄游幼香魚(yú)的計(jì)數(shù);張進(jìn)等[16]利用DIDSON對(duì)上海臨港滴水湖中魚(yú)類(lèi)資源進(jìn)行定量評(píng)估和空間分析;荊丹翔等[17]進(jìn)行了基于識(shí)別聲吶的魚(yú)群目標(biāo)檢測(cè)跟蹤及魚(yú)群在水下三維空間運(yùn)行軌跡和分布研究。
Echoview是澳大利亞Echoview軟件公司開(kāi)發(fā)的一款功能強(qiáng)大、應(yīng)用靈活的水聲學(xué)數(shù)據(jù)處理軟件,經(jīng)過(guò)多年發(fā)展,已被全球漁業(yè)和環(huán)境科學(xué)研究者作為研究漁業(yè)資源和海洋、淡水生態(tài)環(huán)境的重要手段之一。
本研究在相關(guān)研究基礎(chǔ)上,利用Echoview軟件結(jié)合人工判斷對(duì)DIDSON圖像數(shù)據(jù)進(jìn)行魚(yú)類(lèi)識(shí)別提取,其處理流程主要包括背景噪聲去除、魚(yú)類(lèi)目標(biāo)識(shí)別、目標(biāo)屬性提取、目標(biāo)運(yùn)動(dòng)軌跡追蹤,最終提取出所探測(cè)到的魚(yú)類(lèi)目標(biāo)及其個(gè)體體長(zhǎng)信息,為后續(xù)更深入的魚(yú)體行為研究和魚(yú)類(lèi)資源評(píng)估提供技術(shù)參考。
1 材料和方法
1.1 聲學(xué)儀器簡(jiǎn)介
DIDSON由美國(guó)華盛頓大學(xué)應(yīng)用物理實(shí)驗(yàn)室研發(fā),Sound Metrics公司制造,其成像原理是基于聲學(xué)透鏡組合對(duì)聲波進(jìn)行壓縮聚焦,進(jìn)而形成高清的聲學(xué)圖像數(shù)據(jù)。聲學(xué)透鏡在進(jìn)行壓縮波束時(shí)消耗功耗少,易于發(fā)射和接收同一波束,提高了工作效率,也縮減了儀器的體積[15-16]。本研究所使用的標(biāo)準(zhǔn)型DIDSON有兩種工作模式,即探測(cè)模式和識(shí)別模式,分別對(duì)應(yīng)儀器不同工作頻率,具體技術(shù)參數(shù)見(jiàn)表1。DIDSON在工作時(shí)可針對(duì)探測(cè)范圍內(nèi)的觀測(cè)目標(biāo)進(jìn)行自動(dòng)調(diào)焦,根據(jù)設(shè)置的最大觀測(cè)范圍自動(dòng)調(diào)節(jié)其工作頻率,以保證觀測(cè)范圍內(nèi)目標(biāo)圖像的清晰度。
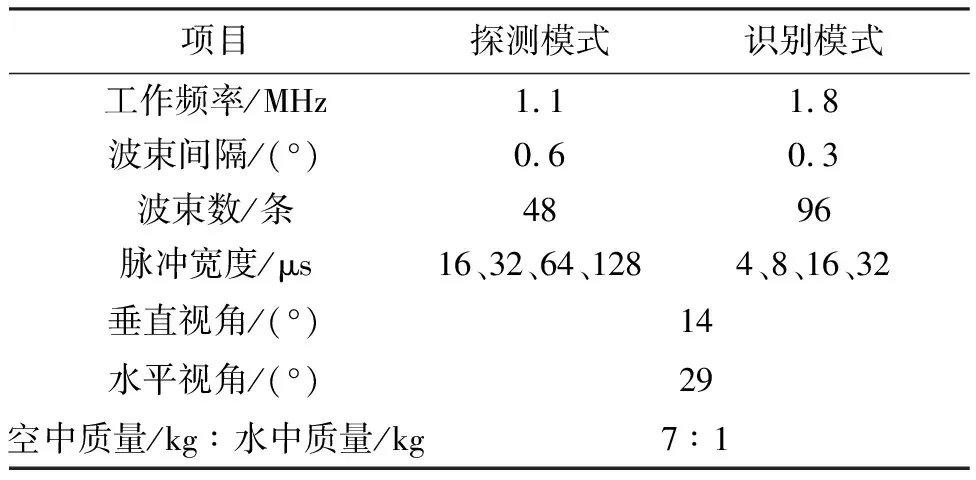
表1 DIDSON詳細(xì)技術(shù)參數(shù)
1.2 數(shù)據(jù)采集
試驗(yàn)數(shù)據(jù)來(lái)自2019年5月份上海市某小型水庫(kù)魚(yú)類(lèi)資源聲學(xué)調(diào)查項(xiàng)目,由小型調(diào)查船搭載DIDSON、GPS進(jìn)行走航式采集,為避免噪聲對(duì)采集數(shù)據(jù)的干擾,將DIDSON聲吶探頭固定于船舷左前方遠(yuǎn)離發(fā)動(dòng)機(jī)部位,DIDSON換能器及安裝如圖1所示。采集數(shù)據(jù)使用DIDSON配套采集軟件DIDSON V5.24,同步記錄于采集筆記本電腦中,探測(cè)船速為4~5節(jié),水面無(wú)較大風(fēng)浪。
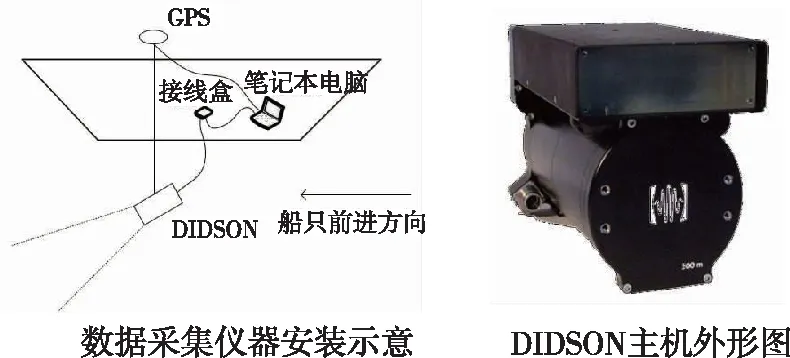
圖1 主機(jī)及安裝示意圖
2 魚(yú)類(lèi)目標(biāo)識(shí)別與提取方法
2.1 背景噪聲去除
在數(shù)據(jù)采集過(guò)程中,由于船只運(yùn)行、移動(dòng)產(chǎn)生噪聲及水中植被、懸浮物等對(duì)DIDSON數(shù)據(jù)產(chǎn)生干擾,使得在原始聲學(xué)數(shù)據(jù)中識(shí)別目標(biāo)變得非常困難,故在聲吶數(shù)據(jù)的預(yù)處理階段,首要工作是將背景噪聲去除[18]。
首先使用Kovesi圖像去噪法將聲吶圖像中出現(xiàn)的隨機(jī)分布的斑點(diǎn)噪聲進(jìn)行模糊化去除,斑點(diǎn)噪聲多由水中氣泡、浮游生物、樹(shù)枝等產(chǎn)生[19],通過(guò)設(shè)定圖像最小波長(zhǎng)、反向標(biāo)準(zhǔn)差等,在聲吶圖像去除噪聲的前提下保留圖像細(xì)節(jié)。其去噪效果如圖2b所示,其中,紅色標(biāo)記為類(lèi)魚(yú)體目標(biāo),與原始圖像圖2a對(duì)比發(fā)現(xiàn),將聲吶圖像中小型斑點(diǎn)噪聲去除、水底植被等噪聲模糊化處理后,去噪效果較為明顯。
噪聲去除后,使用背景差分法將聲吶圖像中水體背景進(jìn)行去除[20]。該算法假設(shè)水體靜止不動(dòng),首先從當(dāng)前數(shù)據(jù)脈沖信號(hào)及其鄰近信號(hào)中進(jìn)行統(tǒng)計(jì)分析,捕獲數(shù)據(jù)中存在的靜態(tài)背景元素;然后以該靜態(tài)背景元素中最低信噪比值作為閾值,從數(shù)據(jù)文件中減去該值。即可將數(shù)據(jù)中靜態(tài)背景進(jìn)行去除,如式(1)所示:
|Ft(x,y)-Fb(x,y)|=Dt(x,y)
(1)
式中:Ft(x,y)表示圖像位置(x,y)的像素值;Fb(x,y) 表示圖像位置(x,y)的水體背景像素值;Dt(x,y)表示(x,y)位置的去除背景結(jié)果。圖2c為去除圖像背景效果圖,其水體背景、水底和產(chǎn)生的聲學(xué)陰影等都被去除。其中,紅色圓圈標(biāo)注為類(lèi)魚(yú)體目標(biāo),下方有多個(gè)懸浮斑點(diǎn),推測(cè)判定為Kovesi算法遺留斑點(diǎn)噪聲或者水體小型浮游生物。
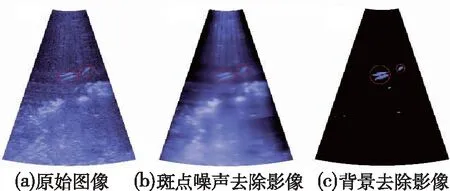
圖2 背景噪聲去除效果圖
2.2 魚(yú)類(lèi)目標(biāo)識(shí)別
對(duì)于DIDSON影像中魚(yú)類(lèi)目標(biāo)識(shí)別,基本原理是設(shè)定魚(yú)類(lèi)目標(biāo)回聲閾值區(qū)間i,并基于原始的回聲圖像創(chuàng)建一個(gè)新的多波束目標(biāo)樣本值Gk,隨后判斷回聲圖像中每個(gè)像素值Hk(x,y)是否在閾值區(qū)間i當(dāng)中,若在區(qū)間當(dāng)中,即用創(chuàng)建的多波束目標(biāo)樣本值Gk來(lái)代替或標(biāo)注符合要求的像素值Hk(x,y),從而實(shí)現(xiàn)聲吶圖像目標(biāo)的識(shí)別。并在目標(biāo)識(shí)別的基礎(chǔ)上,根據(jù)其回聲影像中像素值數(shù)據(jù),得到其長(zhǎng)度、面積、厚度等目標(biāo)屬性,同時(shí),可設(shè)定閾值來(lái)限定得出需要的目標(biāo)屬性值[21]。
圖3a為DIDSON原始聲學(xué)影像數(shù)據(jù),顯示為2個(gè)類(lèi)魚(yú)類(lèi)目標(biāo)并有條帶狀聲學(xué)陰影出現(xiàn);圖3b為在背景噪聲去除算法基礎(chǔ)上進(jìn)行圖像目標(biāo)識(shí)別,并使用藍(lán)色圓點(diǎn)標(biāo)記得出類(lèi)魚(yú)類(lèi)目標(biāo);圖3c為在目標(biāo)識(shí)別基礎(chǔ)上進(jìn)行目標(biāo)屬性閾值的限定,限定目標(biāo)長(zhǎng)度為5~120 cm范圍以內(nèi)。可看出體長(zhǎng)較大個(gè)體被排除,僅顯示個(gè)體較小的魚(yú)類(lèi)目標(biāo),與實(shí)際觀測(cè)結(jié)果相符。
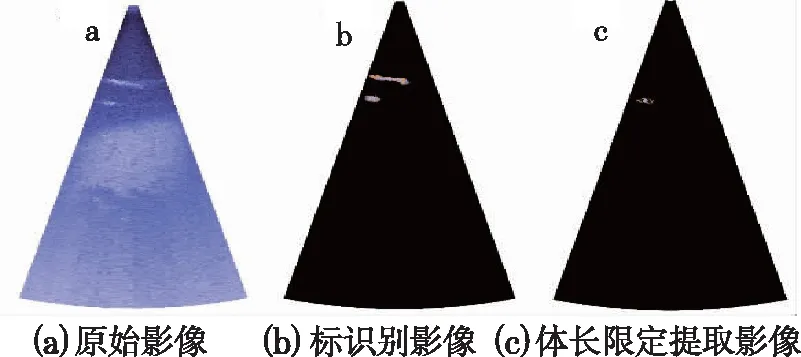
圖3 DIDSON影像目標(biāo)識(shí)別與屬性限定
2.3 目標(biāo)運(yùn)動(dòng)軌跡追蹤
DIDSON聲吶圖像數(shù)據(jù)中實(shí)現(xiàn)魚(yú)類(lèi)目標(biāo)個(gè)體計(jì)數(shù),關(guān)鍵是避免同一目標(biāo)因出現(xiàn)在連續(xù)多幀圖像中而產(chǎn)生重復(fù)計(jì)數(shù)。需對(duì)魚(yú)類(lèi)目標(biāo)運(yùn)動(dòng)軌跡進(jìn)行追蹤,即將在同一軌跡上的目標(biāo)判定為同一條魚(yú)[22]。
在進(jìn)行目標(biāo)軌跡追蹤處理前,先將DIDSON每幀的影像數(shù)據(jù)拼接成連續(xù)的回聲圖像,在該回聲圖像中可觀測(cè)得出每條魚(yú)的運(yùn)行軌跡、相對(duì)于波束主軸的運(yùn)動(dòng)角度等,后續(xù)的魚(yú)類(lèi)目標(biāo)的編輯、分析處理等都是基于該圖像進(jìn)行。在Echoview軟件中可通過(guò)設(shè)定其過(guò)濾目標(biāo)系數(shù)來(lái)改善影像拼接的效果。圖4為截取完成拼接后的回聲圖像。根據(jù)已有經(jīng)驗(yàn),人工判讀圖中紅色標(biāo)記標(biāo)注部分多為魚(yú)類(lèi)運(yùn)行軌跡,在回聲圖中表現(xiàn)為多個(gè)連續(xù)的點(diǎn)狀個(gè)體排列連接形成線狀目標(biāo),標(biāo)注之外的零散分布的點(diǎn)狀目標(biāo),多為預(yù)處理遺留噪聲、水中浮游生物或者DIDSON分辨率無(wú)法正確識(shí)別的較小魚(yú)類(lèi)目標(biāo)。

圖4 DIDSON影像拼接圖
DIDSON聲吶圖像數(shù)據(jù)拼接完成后,使用α-β軌跡追蹤算法對(duì)回聲圖像中魚(yú)體運(yùn)動(dòng)軌跡進(jìn)行識(shí)別跟蹤,跟蹤結(jié)果以不同顏色的線條顯示,算法采用固定系數(shù)濾波的方法,選擇單個(gè)目標(biāo)作為附加到軌跡中的候選對(duì)象,追蹤算法中對(duì)于位置和速度的變化分別由α和β兩個(gè)參數(shù)控制。其原理為:通過(guò)前一時(shí)刻的狀態(tài)量估計(jì)當(dāng)前時(shí)刻的狀態(tài)量,然后與當(dāng)前時(shí)刻的觀測(cè)量相對(duì)比。其算法方程如下所示[23]:
(2)
(3)
其中,位置和速度的預(yù)測(cè)值為:
(4)
(5)

3 計(jì)數(shù)與資源量評(píng)估
3.1 魚(yú)類(lèi)目標(biāo)計(jì)數(shù)
本次調(diào)查共采集14個(gè)文件,對(duì)應(yīng)14個(gè)航段,數(shù)據(jù)處理過(guò)程中對(duì)每航段數(shù)據(jù)進(jìn)行魚(yú)類(lèi)目標(biāo)計(jì)數(shù)和體長(zhǎng)提取。首先基于目標(biāo)運(yùn)動(dòng)軌跡追蹤實(shí)現(xiàn)魚(yú)類(lèi)目標(biāo)計(jì)數(shù),將每條軌跡識(shí)別為一條魚(yú),并同步記錄每條軌跡中心點(diǎn)處的經(jīng)緯度坐標(biāo)和所處深度。為了驗(yàn)證目標(biāo)計(jì)數(shù)的準(zhǔn)確性,根據(jù)數(shù)據(jù)采集質(zhì)量,選取4條航段聲吶數(shù)據(jù),采用人工目視計(jì)數(shù)的方法進(jìn)行驗(yàn)證。人工目視計(jì)數(shù)是指將DIDSON影像數(shù)據(jù)進(jìn)行慢速回放,通過(guò)人工判讀對(duì)影像中出現(xiàn)的魚(yú)類(lèi)目標(biāo)進(jìn)行計(jì)數(shù),統(tǒng)計(jì)對(duì)比結(jié)果見(jiàn)表2。
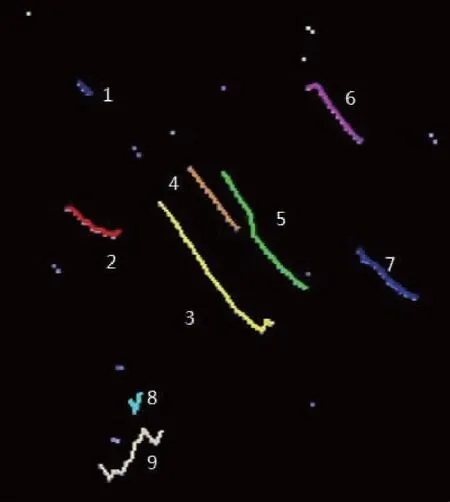
圖5 個(gè)體目標(biāo)軌跡追蹤

表2 人工計(jì)數(shù)與軟件計(jì)數(shù)對(duì)比
從表2可以得出,人工目視計(jì)數(shù)與軟件自動(dòng)計(jì)數(shù)結(jié)果偏差在10%以內(nèi),平均計(jì)數(shù)誤差為7.2%。該方法中個(gè)數(shù)統(tǒng)計(jì)存在偏差的原因有多個(gè)方面:一是出現(xiàn)較密集魚(yú)群時(shí),追蹤得出的魚(yú)類(lèi)運(yùn)動(dòng)軌跡會(huì)出現(xiàn)錯(cuò)亂,導(dǎo)致追蹤結(jié)果出現(xiàn)重復(fù)計(jì)數(shù)等偏差;二是當(dāng)魚(yú)類(lèi)目標(biāo)在靠近水底或在水草中游動(dòng)時(shí),會(huì)被錯(cuò)判為水底或水中噪聲,從而排除在外;三是水中部分懸浮物其目標(biāo)反射強(qiáng)度與魚(yú)體相近,被誤判為魚(yú)類(lèi)等。
3.2 魚(yú)類(lèi)體長(zhǎng)提取
針對(duì)單個(gè)魚(yú)類(lèi)目標(biāo),首先根據(jù)像素將同一運(yùn)動(dòng)軌跡上的每一幀圖像中魚(yú)體體長(zhǎng)進(jìn)行提取,然后對(duì)該目標(biāo)運(yùn)動(dòng)軌跡上的所有體長(zhǎng)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)判斷,由于魚(yú)運(yùn)動(dòng)姿態(tài)和方向各不相同,但魚(yú)類(lèi)目標(biāo)在水平方向運(yùn)動(dòng)時(shí)體長(zhǎng)數(shù)據(jù)最大也最接近實(shí)際值,因此取測(cè)得的最大體長(zhǎng)為該目標(biāo)的體長(zhǎng)。
由于成像聲吶自身分辨率問(wèn)題以及走航式采集產(chǎn)生氣泡較多,因此體長(zhǎng)較小魚(yú)類(lèi)易與水中浮游生物、樹(shù)枝等噪聲混淆,在體長(zhǎng)信息提取時(shí)對(duì)于平均體長(zhǎng)小于5 cm的魚(yú)類(lèi)目標(biāo)忽略不計(jì)。圖6為提取出的魚(yú)體體長(zhǎng)信息分布圖,魚(yú)體體長(zhǎng)絕大部分集中于10~20 cm范圍內(nèi),占總數(shù)的40%以上;體長(zhǎng)范圍在5~10 cm和20~50 cm的魚(yú)類(lèi)目標(biāo)也占比較多,接近總量的40%,60 cm以上魚(yú)類(lèi)數(shù)量較少,占總量的5%左右。
3.3 魚(yú)類(lèi)資源總量估算
根據(jù)目標(biāo)計(jì)數(shù)統(tǒng)計(jì)結(jié)果,14條航段數(shù)據(jù)共統(tǒng)計(jì)得出魚(yú)類(lèi)目標(biāo)1 938尾。采用平面密度法對(duì)水庫(kù)內(nèi)的魚(yú)類(lèi)資源總量進(jìn)行估算,首先根據(jù)每條航線探測(cè)到的魚(yú)類(lèi)數(shù)量和儀器探測(cè)面積得出航線內(nèi)魚(yú)類(lèi)密度;其次將所有航線的平均魚(yú)類(lèi)密度視為水庫(kù)魚(yú)類(lèi)密度,根據(jù)水庫(kù)水域面積估算得出水庫(kù)魚(yú)類(lèi)總數(shù)量。其計(jì)算公式如下:
(6)
(7)
(8)
N=ρ·S
(9)
式中:ni、si和ρi表示第i條測(cè)線的魚(yú)類(lèi)數(shù)量(尾)、儀器探測(cè)面積(m2)和魚(yú)類(lèi)密度(尾/m2);li和ri表示第i條測(cè)線的探測(cè)長(zhǎng)度(m)和提取出的平均水深(m),公式(7)是通過(guò)儀器安裝角度和儀器探測(cè)范圍視角簡(jiǎn)化得來(lái);ρ視為水庫(kù)內(nèi)的魚(yú)類(lèi)平均密度(尾/m2);n表示航線數(shù)量,此處為14;S、N分別表示水庫(kù)總面積(m2)和魚(yú)類(lèi)資源總量(尾)。
本次調(diào)查探測(cè)航線總長(zhǎng)度為17.19 km,平均水深4.26 m,經(jīng)計(jì)算可得,航線內(nèi)魚(yú)類(lèi)目標(biāo)平均密度約為0.052 9尾/m2。本次調(diào)查水庫(kù)水域面積為1.92 km2,因此,水域內(nèi)魚(yú)類(lèi)資源總數(shù)量N=101 568尾。
4 討論
4.1 DIDSON適用場(chǎng)景
DIDSON作為一款高清晰度的聲學(xué)攝像儀,其聲學(xué)影像數(shù)據(jù)能清晰、直觀地顯示出魚(yú)類(lèi)形態(tài)、位置信息,與常規(guī)的科學(xué)魚(yú)探儀相比,具有更多的信息量、更直觀的圖形顯示等。沈蔚等[24]曾對(duì)DIDSON和科學(xué)魚(yú)探儀Biosonics DT-X進(jìn)行比較分析,結(jié)果顯示兩類(lèi)儀器評(píng)估出的魚(yú)類(lèi)資源并沒(méi)有太大差距,但在淺水地帶DIDSON所受到的水中氣泡等因素的干擾更小,能較為方便地提取出魚(yú)類(lèi)的體長(zhǎng)信息,并進(jìn)行魚(yú)類(lèi)行為的觀測(cè)。
DIDSON具有較高的工作頻率,對(duì)于船速要求較高。張進(jìn)[16]在研究中指出,一旦船速較快,采集到的魚(yú)體目標(biāo)就會(huì)出現(xiàn)鋸齒狀輪廓,當(dāng)速度降低時(shí)鋸齒狀特征就有明顯改善。在針對(duì)DIDSON聲吶圖像的諸多研究中[13,21],多采用定點(diǎn)觀測(cè)進(jìn)行數(shù)據(jù)采集,所采集到的數(shù)據(jù)質(zhì)量較好,對(duì)于數(shù)據(jù)中噪聲的處理也較為簡(jiǎn)單。因此,DIDSON更適用于在江河湖泊等淺水水域開(kāi)展定點(diǎn)觀測(cè),或搭載于無(wú)人船、小型測(cè)量船等進(jìn)行慢速走航探測(cè),對(duì)于風(fēng)浪大、深度大的海洋魚(yú)類(lèi)資源探測(cè)顯得力所不及。
4.2 聲吶圖像處理方法
針對(duì)DIDSON聲吶圖像噪聲去除,童劍鋒[15]采用3×3模板的中值濾波和高斯濾波結(jié)合進(jìn)行圖像去噪和平滑處理;Kang[21]使用背景差分的方法,將一段沒(méi)有魚(yú)類(lèi)目標(biāo)的聲吶圖像作為子集,然后逐幀減去該背景進(jìn)行噪聲去除,但面對(duì)走航采集的聲吶數(shù)據(jù),圖像背景復(fù)雜,使用上述方法效果不佳。本研究采用Kovesi圖像去噪和背景差分相結(jié)合,去噪效果較為理想,但是將斑點(diǎn)噪聲模糊化的處理手段,也會(huì)使得一部分魚(yú)體信息模糊,尤其當(dāng)魚(yú)體目標(biāo)較小時(shí),會(huì)被識(shí)別成斑點(diǎn)噪聲,降低了目標(biāo)識(shí)別準(zhǔn)確度,后續(xù)應(yīng)將背景去除與運(yùn)動(dòng)軌跡相結(jié)合來(lái)改進(jìn)算法,按照運(yùn)動(dòng)狀態(tài)來(lái)區(qū)分魚(yú)類(lèi)目標(biāo)和噪聲。
進(jìn)行魚(yú)類(lèi)目標(biāo)運(yùn)動(dòng)軌跡追蹤是避免重復(fù)計(jì)數(shù)的必要手段,常見(jiàn)的目標(biāo)追蹤方法有卡爾曼濾波、粒子濾波及其各種擴(kuò)展算法等,本研究中采用的α-β軌跡追蹤對(duì)于離散目標(biāo)識(shí)別準(zhǔn)確度較高,但當(dāng)目標(biāo)成群出現(xiàn)時(shí),多個(gè)運(yùn)行軌跡相互交叉,會(huì)出現(xiàn)重復(fù)計(jì)數(shù)或少計(jì)數(shù)的問(wèn)題。
4.3 資源量評(píng)估的影響因素
聲學(xué)數(shù)據(jù)采集時(shí),由于試驗(yàn)水庫(kù)水位較淺,船只在移動(dòng)過(guò)程中產(chǎn)生的水流和噪聲都會(huì)對(duì)魚(yú)群產(chǎn)生驅(qū)趕,因此需要引入合理的驅(qū)趕系數(shù)。比如張信[25]通過(guò)同一水域的定點(diǎn)觀測(cè)和走航觀測(cè)得出的魚(yú)類(lèi)密度比值來(lái)確定,也可以使用無(wú)人船搭載DIDSON進(jìn)行探測(cè),減少船只走航對(duì)魚(yú)的驅(qū)趕。同時(shí),回聲探測(cè)儀普遍存在一定的探測(cè)盲區(qū),使水面表層的魚(yú)類(lèi)目標(biāo)無(wú)法被探測(cè)到[26]。本研究使用船只較小,儀器吃水淺且傾斜安置,減小了儀器的探測(cè)盲區(qū)。在數(shù)據(jù)分析階段,李斌等[27-28]指出,為避免水底強(qiáng)反射信號(hào)干擾,在數(shù)據(jù)分析時(shí)需要將靠近水底部分信號(hào)進(jìn)行刪除[27-28]。本研究中,DIDSON以與水平方向呈60°夾角的方式安裝,避免了水底強(qiáng)反射信號(hào)的干擾,減少對(duì)水底部分的剔除,也提高了探測(cè)到水底魚(yú)類(lèi)目標(biāo)的可能性。
5 結(jié)論
基于Echoview聲學(xué)數(shù)據(jù)后處理軟件及其相關(guān)算法,實(shí)現(xiàn)了從DIDSON聲吶數(shù)據(jù)中進(jìn)行魚(yú)類(lèi)目標(biāo)識(shí)別、自動(dòng)計(jì)數(shù)和體長(zhǎng)信息提取,并通過(guò)與人工計(jì)數(shù)相對(duì)比的試驗(yàn)得出該方法具有較高的統(tǒng)計(jì)精度。依據(jù)提取出的魚(yú)類(lèi)目標(biāo)數(shù)據(jù)并結(jié)合相關(guān)資源評(píng)估方法,可對(duì)水庫(kù)中的魚(yú)類(lèi)資源進(jìn)行評(píng)估。結(jié)果證明,DIDSON可以用于魚(yú)類(lèi)識(shí)別與計(jì)數(shù),尤其在淺水水域的魚(yú)類(lèi)資源探測(cè)與管理方面具有非常廣闊的應(yīng)用空間。
