電動汽車永磁同步電機電流控制故障分析研究
2020-12-24 07:57:12黃薪槐胡慧婧楊秋霞何淵韋錦波李大旺黃祖朋
科技創新與應用 2020年26期
黃薪槐 胡慧婧 楊秋霞 何淵 韋錦波 李大旺 黃祖朋
摘? 要:作為電動汽車的核心功能部件“三電”之一的驅動電機系統穩定性是整車性能的關鍵因素。驅動電機系統的效率直接影響續航里程;輸出扭矩的穩定性直接影響整車的NVH;可靠性直接影響整車的安全性。電流控制故障是較為嚴重的驅動電機系統故障,對效率、扭矩輸出平順性以及可靠性均有影響。文章主要分析了電流控制故障發生的現象與危害、發生的工況以及原因。
關鍵詞:驅動電機系統;電流控制故障;現象與危害;原因
中圖分類號:TM341 文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)26-0070-02
Abstract: The stability of the drive motor system, one of the core functional parts of electric vehicles, is the key factor of the vehicle performance. The efficiency of driving motor system directly affects the driving range. The stability of output torque directly affects the NVH of the vehicle. Reliability directly affects the safety of the vehicle. Current control fault is a serious driving motor system fault, which affects the efficiency, torque output smoothness and reliability. This paper mainly analyzes the phenomenon and harm of current control fault, the working condition and the reason.
Keywords: drive motor system; current control fault; phenomenon and harm; reason
1 概述
隨著國六標準的實施,國家對汽車排放標準越來越嚴格,同時在國家政策的指引下,新能源汽車技術越來越成熟。作為新能源汽車中“零排放”的純電動汽車具有綠色環保,出行成本低,且維護保養簡單等優點,逐步受到市場的青睞。驅動電機系統是純電動汽車重要的核心部件,其穩定性對整車性能起著關鍵作用。永磁同步電機相對交流感應等電機具有效率高、功率密度大的優點,其應用在純電動汽車中十分廣泛。本文針對電動車用永磁同步電機系統發生的電流控制故障進行分析研究,對驅動電機的控制穩定性具有重要意義。
2 永磁同步電機控制方法
永磁同步電機的控制方法常用的有恒壓頻比、直接轉矩控制以及矢量脈寬調制法。恒壓頻比法屬于開環控制,無電機轉子位置、轉速反饋,控制精度不高,動態響應較差。直接轉矩控制是在定子靜止坐標構建磁鏈和電磁轉矩模型,通過改變電壓矢量實現磁鏈和轉矩的BANG-BANG控制,該控制方法簡單、轉矩響應好,在要求高瞬態扭矩響應場合應用廣泛,但是在低轉速時控制頻率低,扭矩脈動大,在電動汽車上應用,其表現為起動性能不好,抖動較為劇烈。矢量控制是通過坐標變換把檢測的定子三相電流、磁鏈等矢量分解到轉子同步坐標上,沿轉子磁鏈方向的矢量稱直軸勵磁電流(id),正交于轉子磁鏈方向的矢量稱交軸轉矩電流(iq),通過調節勵磁電流和轉矩電流實現不同的控制目標,該控制方法可以獲得較高的速度和扭矩控制精度,而且穩態和動態的響應良好。電動汽車上永磁同步電機的控制一般運用這一控制方法。根據控制目標不同,矢量控制可以細分為恒轉矩角控制、最大功率因數控制、最大轉矩/電流比控制以及弱磁控制等[1]。本文主要針對矢量控制的永磁同步電機電流控制故障分析。
3 電流控制故障現象與危害
電動車用永磁同步電機電流控制故障在實車上表現為車在較高車速,突然猛加速過程發生整車抖動。嚴重者在行車過程中電機工作狀態失控,從而導致嚴重后果。在臺架上表現為,電機在高轉速,并輸出較大扭矩時,電機振動變大,直流端電流波動變大,扭矩不穩定,同時可以聽到機械摩擦的聲音,而電池模擬器端電壓也隨之波動,最后電機控制精度逐漸變差,扭矩精度嚴重時超過10Nm。發生電流控制故障時,汽車NVH明顯變差,影響駕駛感受,并存在一定的安全隱患,在行車過程中應當避免。
4 電流控制故障發生工況
在臺架上復現電流控制故障時發現,當逆變器直流端電壓較低時,電機在較低轉速段大扭矩工況會發生電流、扭矩波動情況。當直流端電壓較大時,電流控制故障則發生在較高轉速、較大扭矩工況。
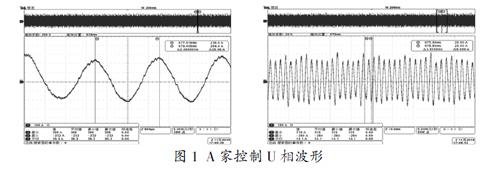
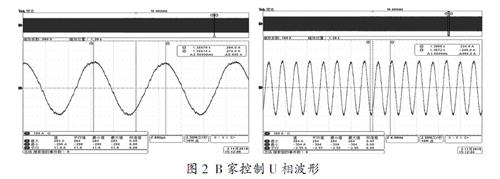
不同控制器在額定電壓下6000rpm,200Arms時的三相交流電流波形如圖1、圖2,發現兩家控制器交流電流波形均出現鋸齒形,但A家明顯波形較差,峰值不穩定。
5 電流控制故障原因分析
5.1 旋變信號波形畸變
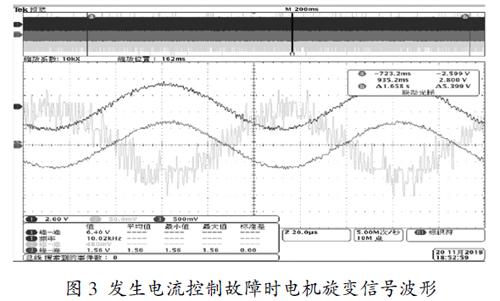
電機旋變信號是指電機內置測速旋轉變壓器反饋的電機轉子轉速、位置的信號。當旋變信號波形發生畸變時,速度閉環控制會出現波動,引起整個控制系統振蕩,發生電流控制故障。在臺架上復現故障時,發現發生電流控制故障的旋變信號波形存在畸變。圖3為發生電流控制故障時電機旋變信號波形,從圖中可看出余弦信號波形比激勵信號波形和正弦波形毛刺多。
圖3 發生電流控制故障時電機旋變信號波形
5.2 電機高速運轉時弱磁控制不穩定
(1)PI調節參數不合適。永磁同步電機矢量控制中包含電機轉子轉速PI調節以及直軸、交軸電流PI調節。如果系統PI參數選擇不好,控制目標也會趨于發散,導致控制系統失穩,發生控制故障[2]。在解決電流控制故障問題過程中,因為需要兼顧不同電壓等級下所有高轉速段的控制效果,發現通過修正PI調節參數獲得的結果并不理想。
(2)電壓畸變,導致控制算法不準。車用電機控制器一般多用電壓源型逆變器,在永磁同步電機矢量控制中,需通過坐標變換獲得控制目標,作為控制算法中重要變量-逆變器的相電壓往往不可直接測量,直接用目標值替代實際值。由于功率器件的非理想性以及電流逆變過程中存在的死區時間,逆變器相電壓實際值往往與目標值存在較大差異,導致控制算法不準確,引起系統振蕩,發生電流控制故障[3]。
(3)電機標定不準確。車用永磁同步電機控制一般是通過標定的方法獲得比較理想的直軸電流id以及交軸電流iq控制目標值,在電機工作過程中通過查表實現在各個電壓等級、各個轉速、各個扭矩下最優控制。在電機標定過程影響精度的因素也很多,例如電機溫度,標定設備的轉速、扭矩精度等,如果電機標定不準確,id/iq目標值出現偏差,也同樣會引發電流控制故障。
(4)母線電壓穩定對電流控制故障影響。在臺架上復現電流控制故障過程中,發現使用不同電池模擬器對同一產品在相同工況下進行測試,發現母線電壓穩定能力較強設備實驗電流控制故障更容易發生,但使用電壓穩定較差的設備復現問題時,電機三相電流和扭矩波動依然是較大,同時直流母線段電壓波動也比較大。這與電池模擬器的PID調節能力有關,當電機控制器PID調節失穩時,如果直流母線段端電壓PID調節能力加強,會加劇電機電流PID振蕩,更容易發生電流控制故障。同理在實車上,動力電池的穩壓能力對電流控制有類似的影響。
6 總結與展望
電機控制器電流控制的穩定性對純電動汽車的NVH、續航里程以及行駛安全具有關鍵性作用,隨著電機控制技術的日益發展,電機控制器的性能也越來越穩定,給大家帶來更安全、更舒適的綠色出行方式。
參考文獻:
[1]謝超藝.適應純電動汽車運行的電機控制器算法研究[D].廣西科技大學,2015:16-33.
[2]任勁松,劉棟良.永磁同步電機弱磁控制中過調制算法的應用[J].工業控制計算機,2016,29(03):133-136.
[3]周傳煒.電動車用永磁同步相電壓補償策略研究[D].哈爾濱工業大學,2015:19-20.
[4]郭強,李強.三相永磁同步電機直接轉矩控制技術研究[J].機械工程與自動化,2016,02:193-194.
[5]李小彤.永磁同步電機矢量控制策略的研究與實現[D].濟南大學,2017:7-19.