資源一號(hào)02D衛(wèi)星幾何定位精度保障鏈設(shè)計(jì)及在軌驗(yàn)證
2020-12-25 07:13:08安萌梁德印張宏宇韓波于生全
航天器工程 2020年6期
安萌 梁德印 張宏宇 韓波 于生全
(1 北京空間飛行器總體設(shè)計(jì)部,北京 100094)(2 中國(guó)空間技術(shù)研究院遙感衛(wèi)星總體部,北京 100094)(3 北京空間機(jī)電研究所,北京 100094)
遙感衛(wèi)星圖像數(shù)據(jù)的定位精度是衡量衛(wèi)星圖像幾何質(zhì)量的重要的系統(tǒng)指標(biāo)之一,其指標(biāo)的高低直接影響到用戶對(duì)于衛(wèi)星數(shù)據(jù)產(chǎn)品應(yīng)用的效率。資源一號(hào)02D衛(wèi)星(又稱為5米光學(xué)業(yè)務(wù)衛(wèi)星)是自然資源部用戶定制的業(yè)務(wù)衛(wèi)星,采用一步正樣的研制模式,即衛(wèi)星通過(guò)方案設(shè)計(jì)后,直接進(jìn)入正樣研制,主要應(yīng)用于國(guó)土資源調(diào)查、地礦勘探和山水林田湖草等高精度觀測(cè)等領(lǐng)域。這些領(lǐng)域中目標(biāo)精細(xì)分類,面積估算和紅線劃定等主要業(yè)務(wù)對(duì)于衛(wèi)星的幾何定位精度均具有較高的要求。
CE90(Circle Error 90%)定位精度評(píng)價(jià)標(biāo)準(zhǔn)作為當(dāng)今世界上主流的定位精度評(píng)價(jià)標(biāo)準(zhǔn)之一,已經(jīng)被國(guó)外大多數(shù)遙感衛(wèi)星的應(yīng)用評(píng)價(jià)機(jī)構(gòu)所采用[1]。資源一號(hào)02D衛(wèi)星在幾何定位精度的定量化水平,用戶對(duì)于定位精度要求在無(wú)控制點(diǎn)和星下點(diǎn)成像條件下,可見近紅外相機(jī)(VNIC)平面定位精度≤50 m(CE90),高光譜相機(jī)(AHSI)平面定位精度≤100 m(CE90)。這是資源系列衛(wèi)星第一次采用CE90評(píng)價(jià)標(biāo)準(zhǔn)對(duì)衛(wèi)星的幾何定位精度進(jìn)行評(píng)價(jià)。傳統(tǒng)的衛(wèi)星定位精度設(shè)計(jì)和方法中,主要是針對(duì)衛(wèi)星定位精度進(jìn)行指標(biāo)分解,根據(jù)分解后各個(gè)項(xiàng)目的指標(biāo)要求,在設(shè)計(jì)和研制過(guò)程中對(duì)項(xiàng)目進(jìn)行控制,最終實(shí)現(xiàn)定位精度的要求[2]。但這種方式,沒有對(duì)影響因素的傳遞環(huán)節(jié)進(jìn)行分析,并與研制流程緊密結(jié)合,容易在某個(gè)環(huán)節(jié)上出現(xiàn)疏漏,控制時(shí)機(jī)也難以把握。同時(shí),也沒有對(duì)影響定位精度的因素給出一個(gè)定量化的權(quán)重影響,因此無(wú)法對(duì)影響定位精度的關(guān)鍵環(huán)節(jié)進(jìn)行識(shí)別和控制。影響了定位精度的控制結(jié)果。
本文根據(jù)用戶提出的高定位精度要求,梳理出影響定位精度的主要因素,提出了一種衛(wèi)星定位精度傳遞保障鏈的設(shè)計(jì)方法,在原有定位精度分析控制方法的基礎(chǔ)上,增加了控制鏈路和關(guān)鍵環(huán)節(jié)分析,并將關(guān)鍵環(huán)節(jié)與衛(wèi)星研制流程相結(jié)合,從而保證了衛(wèi)星定位精度控制的全面性和可操作性。通過(guò)在軌驗(yàn)證,衛(wèi)星定位精度各項(xiàng)指標(biāo)均滿足用戶指標(biāo)要求,對(duì)其他衛(wèi)星定位精度的分析和控制具有借鑒意義。
1 幾何定位精度指標(biāo)分解
1.1 幾何定位精度表示方法
目前,遙感衛(wèi)星幾何定位精度的評(píng)價(jià)方法主要分為中誤差和圓概率誤差兩種,兩者的定義有較大的差別。遙感衛(wèi)星以往采用的中誤差評(píng)價(jià)方法主要反映測(cè)量值與參考值的偏差程度,即精確度(Accuracy),一般用誤差的均方根(RMSE)來(lái)度量[3],方差是中誤差或均方根誤差的平方,比較方便的是采用1σ來(lái)進(jìn)行。中誤差的計(jì)算方法下。
(1)
式中:xi為某個(gè)測(cè)量點(diǎn)沿軌方向測(cè)量值;yi為某個(gè)測(cè)量點(diǎn)垂軌方向測(cè)量值;x0為某個(gè)測(cè)量點(diǎn)沿軌方向參考值;y0為某個(gè)測(cè)量點(diǎn)垂軌方向參考值。Xi為某個(gè)測(cè)量點(diǎn)沿軌方向測(cè)量值與參考值的偏差;Yi某個(gè)測(cè)量點(diǎn)為垂軌方向測(cè)量值與參考值的偏差。ux為沿軌方向測(cè)量值與參考值偏差的中誤差;uy為垂軌方向測(cè)量值與參考值偏差的中誤差;σx為沿軌方向的定位精度;n為測(cè)量點(diǎn)的個(gè)數(shù)。σy為沿軌方向的定位精度;σxy是在兩個(gè)方向上定位精度的均方根誤差,即總定位精度。傳統(tǒng)中誤差評(píng)價(jià)方法的核心在于中誤差的計(jì)算,得到幾何定位精度σx和σy,即求其樣本數(shù)據(jù)的標(biāo)準(zhǔn)差σ。在計(jì)算單一方向上的幾何定位精度(沿軌、垂軌)時(shí),傳統(tǒng)的中誤差評(píng)價(jià)方法簡(jiǎn)單可靠[4]。
而圓概率誤差的物理意義為樣本中的被測(cè)點(diǎn)的偏差落在以圓概率誤差(Circular Error Probable,CEP)為半徑的圓內(nèi)的概率為P,當(dāng)P為90%時(shí),CEP即為CE90。以目標(biāo)點(diǎn)為圓心時(shí),CEP能夠表征外部符合精度。資源一號(hào)02D衛(wèi)星采用CEP精度中的CE90來(lái)進(jìn)行幾何精度的評(píng)價(jià),分別為可見近紅外相機(jī)不大于50 m和高光譜相機(jī)不大于100 m。圓概率誤差下的幾何定位誤差的聯(lián)合概率密度分布為
(2)
式中:ρ為x、y方向定位誤差的相關(guān)系數(shù)。對(duì)于平面幾何定位精度來(lái)說(shuō),圓概率誤差和中誤差兩者的轉(zhuǎn)換關(guān)系可以由采用服從二維卡方分布的統(tǒng)計(jì)量出發(fā)來(lái)進(jìn)行度量。圓概率誤差和中誤差兩個(gè)獨(dú)立隨機(jī)變量,如果都服從標(biāo)準(zhǔn)的正態(tài)分布,則這兩個(gè)服從正態(tài)分布的變量可以構(gòu)成一個(gè)新的隨機(jī)變量,并服從卡方分布,自由度為2。設(shè)兩個(gè)隨機(jī)變量分別是X,Y,分別為水平面上X和Y向上的定位誤差,且定位結(jié)果不存在系統(tǒng)誤差,這時(shí)X,Y應(yīng)為獨(dú)立變量,且服從如下的分布N,式中0為期望,σ2為方差。
X:N(0,σ2),Y:N(0,σ2)
(3)

(4)
通過(guò)如下方程可求解CE90對(duì)應(yīng)的半徑大小,可由卡方分布在概率小于0.9時(shí)的分位點(diǎn)求得。
(5)
通過(guò)查表,R=2.146σ。根據(jù)兩種評(píng)價(jià)方式的轉(zhuǎn)換關(guān)系可以看出,CE90的評(píng)價(jià)方式較1σ的評(píng)價(jià)方法的要求更高,50 m(CE90)的定位精度相當(dāng)于34.2 m(1σ),因此對(duì)于衛(wèi)星各項(xiàng)指標(biāo)的控制要求更高,需要在衛(wèi)星方案和正樣階段進(jìn)行更嚴(yán)格的控制。
1.2 定位精度指標(biāo)分解
按照常規(guī)方法[5-6],在資源一號(hào)02D衛(wèi)星的方案階段對(duì)影響可見近紅外相機(jī)和高光譜相機(jī)定位精度的各項(xiàng)指標(biāo)進(jìn)行了分解。
可見近紅外相機(jī)幾何定位精度指標(biāo)分解如表1所示。高光譜相機(jī)幾何定位精度指標(biāo)分解如表2所示。
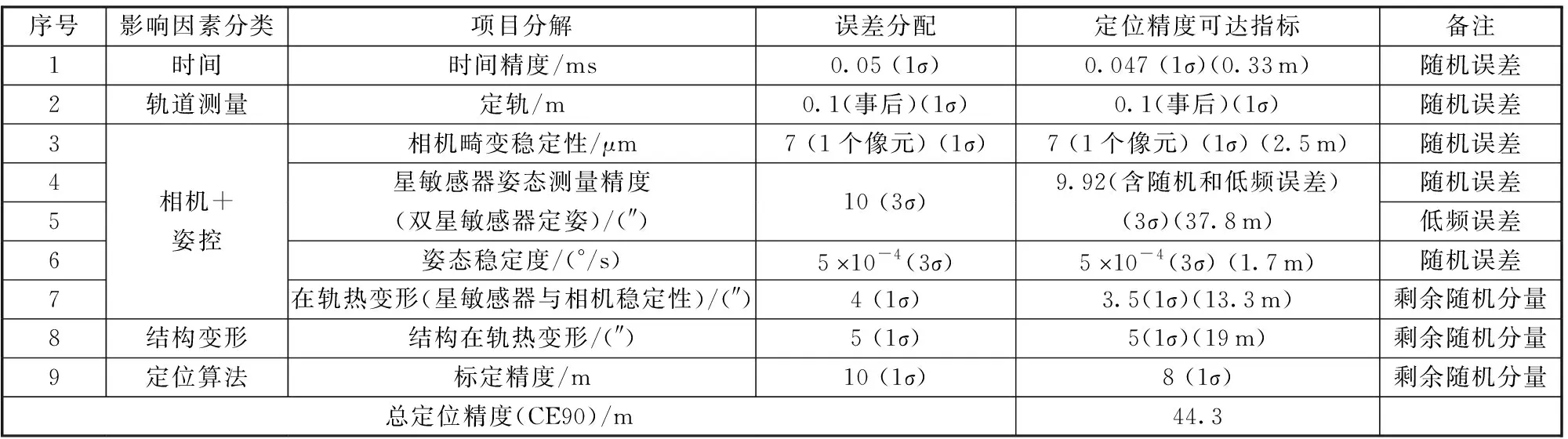
表1 可見近紅外相機(jī)幾何定位精度指標(biāo)分解Table 1 Distributed factors for geo-location of VNIC

表2 高光譜相機(jī)幾何定位精度指標(biāo)分解表Table 2 Distributed factors for geo-location of AHSI
通過(guò)分解可以看出,相機(jī)和姿控因素是影響資源一號(hào)02D衛(wèi)星兩臺(tái)相機(jī)定位精度的主要因素。因此在方案和正樣設(shè)計(jì)中需要重點(diǎn)進(jìn)行關(guān)注。但目前這種分解的方式較為粗獷,在設(shè)計(jì)和研制過(guò)程中難以操作,因此需要將因素進(jìn)行細(xì)化,并給出定量化的傳遞過(guò)程,以便在適當(dāng)?shù)臅r(shí)機(jī)進(jìn)行過(guò)程控制。
2 定位精度保障鏈設(shè)計(jì)和實(shí)施
2.1 衛(wèi)星定位精度保障鏈設(shè)計(jì)
定位精度設(shè)計(jì)保障鏈?zhǔn)菍?duì)定位精度影響較大的因素,資源一號(hào)02D衛(wèi)星的定位精度保障鏈設(shè)計(jì)是按照誤差傳遞的思路進(jìn)行,并給出設(shè)計(jì)和仿真與測(cè)試的對(duì)應(yīng)關(guān)系。最終給出設(shè)計(jì)和仿真的關(guān)鍵控制環(huán)節(jié)。資源一號(hào)02D衛(wèi)星定位精度保障鏈環(huán)節(jié)設(shè)計(jì)流程圖如圖1所示。
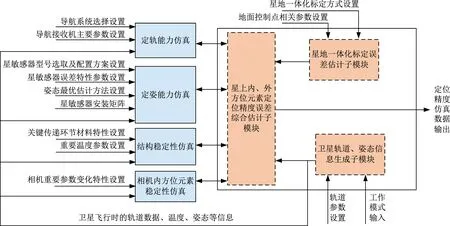
圖1 資源一號(hào)02D衛(wèi)星定位精度保障鏈設(shè)計(jì)流程Fig.1 ZY-1-02D satellite design flow of geo-location insurance chains
主要的影響定位精度的變量共4個(gè)方面分為9項(xiàng),在圖1中已經(jīng)給出。對(duì)應(yīng)的仿真流程包括星上內(nèi)、外方位元素精度誤差估計(jì)、星地一體化標(biāo)定誤差估計(jì)和衛(wèi)星軌道、姿態(tài)估計(jì)3個(gè)關(guān)鍵環(huán)節(jié)。由于資源一號(hào)02D衛(wèi)星采用一步正樣的研制模式,需要進(jìn)行精準(zhǔn)的設(shè)計(jì),同時(shí)在正樣進(jìn)行嚴(yán)格控制,在方案和正樣階段均制定了詳細(xì)的研制流程,以便進(jìn)行控制。
2.2 方案階段定位精度保障設(shè)計(jì)
方案階段定位精度工作的主要目的是對(duì)平臺(tái)和載荷提出具體控制要求。保障鏈的傳遞環(huán)節(jié)為設(shè)計(jì)目標(biāo)—設(shè)計(jì)驗(yàn)證方法—設(shè)計(jì)結(jié)果(正樣設(shè)計(jì)要求),論證工作的技術(shù)流程如圖2所示。
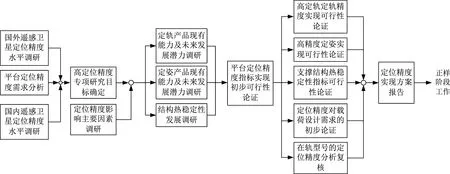
圖2 方案階段提升定位精度工作技術(shù)流程Fig.2 Technology flow chart of geo-location upgrade in scheme design phase
結(jié)合衛(wèi)星的研制流程,衛(wèi)星在方案階段開展的高精度定姿系統(tǒng)詳細(xì)設(shè)計(jì),主要分為高精度定姿、定軌保障設(shè)計(jì),高穩(wěn)定結(jié)構(gòu)保障設(shè)計(jì)和高幾何精度載荷保障設(shè)計(jì)3個(gè)方面。具體項(xiàng)目見表3、表4和表5所示。

表3 高精度定姿、定軌保障設(shè)計(jì)Table 3 High-precision attitude and orbit determination design

表4 高穩(wěn)定性結(jié)構(gòu)保障設(shè)計(jì)Table 4 High-precision structure insurance design

表5 高幾何精度載荷保障設(shè)計(jì)Table 5 High-geometric precision payload insurance design
2.3 正樣階段定位精度保障控制和結(jié)果
正樣階段提升定位精度工作的主要目的是提出各項(xiàng)指標(biāo)的測(cè)試方法和測(cè)試時(shí)機(jī),其保障鏈的傳遞環(huán)節(jié)為控制目標(biāo)—測(cè)試(控制)方法—控制結(jié)果。對(duì)無(wú)法進(jìn)行測(cè)試的開展仿真分析和復(fù)核復(fù)算工作,進(jìn)行過(guò)程控制,技術(shù)流程如圖3所示。
結(jié)合衛(wèi)星的研制流程,衛(wèi)星在正樣階段開展的高精度測(cè)試和分析保障,主要分為高精度定姿、定軌保障設(shè)計(jì)、高穩(wěn)定結(jié)構(gòu)保障設(shè)計(jì)和高幾何精度載荷保障測(cè)試3個(gè)方面。具體項(xiàng)目見表6、表7和表8所示。

圖3 正樣階段提升定位精度工作技術(shù)流程Fig.3 Technology flow chart of geo location upgrade in flight model phase

表6 高精度定姿、定軌保障測(cè)試Table 6 High-precision attitude and orbit determination test
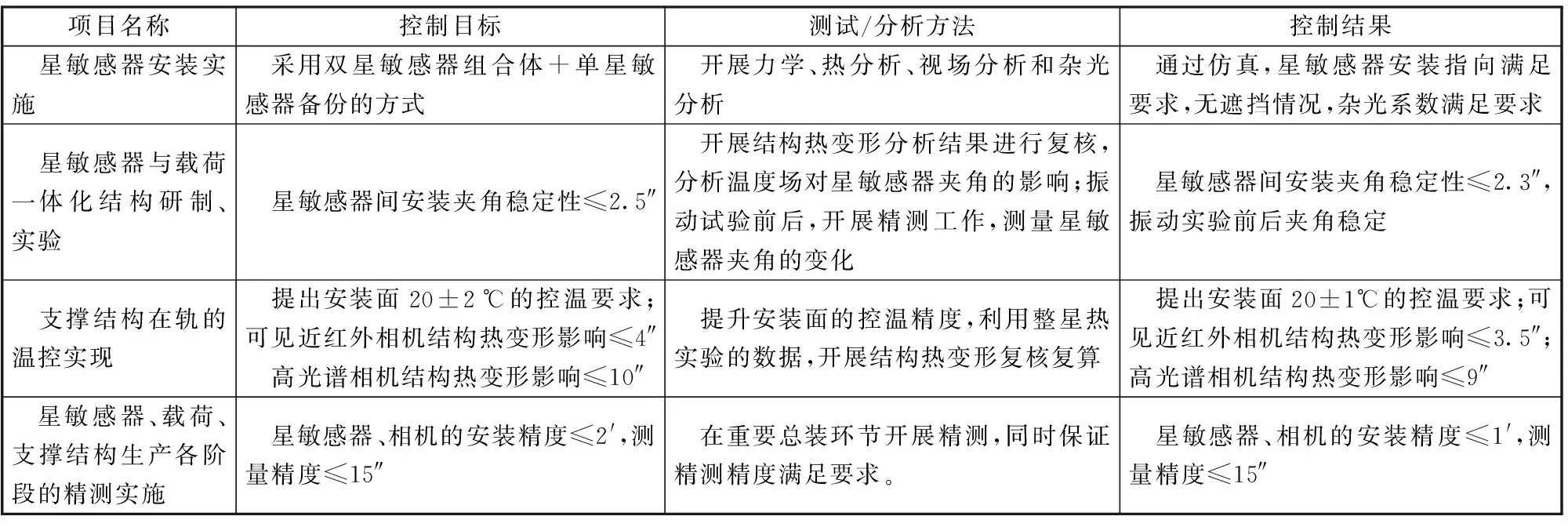
表7 高穩(wěn)定性結(jié)構(gòu)保障測(cè)試Table 7 High-precisionstructureinsurance test

表8 高幾何精度載荷保障Table 8 High-geometric precision payload
通過(guò)正樣階段控制,得到最終控制(測(cè)試)結(jié)果。利用控制數(shù)據(jù),按照表1和表2的方法對(duì)定位精度再次進(jìn)行復(fù)算,得到可見近紅外相機(jī)和高光譜相機(jī)的最終定位精度分別為21 m(CE90)和85.2 m(CE90),滿足研制總要求的指標(biāo)要求。
3 定位精度在軌驗(yàn)證結(jié)果
2020年4月到7月,對(duì)資源一號(hào)02D衛(wèi)星(不同側(cè)擺角、不同時(shí)間、不同軌道、不同地形、清晰、成像質(zhì)量良好)VNIC和AHSI相機(jī)進(jìn)行了定位精度的在軌測(cè)試,以全球公開的SRTM30數(shù)據(jù)為高程基準(zhǔn)進(jìn)行外部精度的測(cè)試評(píng)估。獲取了資源一號(hào)02D衛(wèi)星兩臺(tái)相機(jī)共60景數(shù)據(jù)進(jìn)行在軌測(cè)試,其中可見近紅外相機(jī)34景,高光譜相機(jī)24景。拍照地區(qū)覆蓋東北、華北、內(nèi)蒙古、西北等北方地區(qū)以及南方地區(qū)。
在軌測(cè)試方法是在經(jīng)過(guò)系統(tǒng)幾何校正的圖像上,計(jì)算控制點(diǎn)(GCP)的圖像坐標(biāo),并算出GCP的圖像坐標(biāo)和實(shí)際地理坐標(biāo)的差值,計(jì)算多景圖像GCP位置誤差值的均方根誤差作為圖像的定位誤差[7-8]。
從定位精度測(cè)試結(jié)果可知,對(duì)不同側(cè)擺角、不同時(shí)間、不同軌道、不同地理位置的測(cè)試數(shù)據(jù),采用公開的SRTM30高程數(shù)據(jù)進(jìn)行幾何校正[9],資源一號(hào)02D衛(wèi)星VNIC相機(jī)幾何定位精度大約為19.2 m(CE90),AHIS相機(jī)幾何定位精度為87.9 m(CE90),且衛(wèi)星側(cè)擺角和地形起伏對(duì)幾何定位精度的影響較小,總體指標(biāo)滿足研制總要求的要求。通過(guò)實(shí)測(cè)值和定位精度控制分析比較來(lái)看,兩者的數(shù)值較為接近,證明了分析方法的有效性和正確性。
4 結(jié)束語(yǔ)
資源一號(hào)02D衛(wèi)星在幾何定位精度設(shè)計(jì)控制過(guò)程中,是按照測(cè)繪衛(wèi)星的標(biāo)準(zhǔn)執(zhí)行的。本文根據(jù)資源一號(hào)02D衛(wèi)星提出的高定位精度的要求,在分析中誤差和圓概率誤差轉(zhuǎn)換關(guān)系的同時(shí),提出了一種定位精度保障鏈的傳遞分析模型,該方法可以較完整地梳理出對(duì)定位精度各項(xiàng)影響因素的傳遞環(huán)節(jié),保證分解和控制的全面性,并可在各個(gè)環(huán)節(jié)中考慮誤差影響的權(quán)重,并與研制流程相結(jié)合,找到影響定位精度的關(guān)鍵環(huán)節(jié),從而提高控制的精準(zhǔn)度,通過(guò)衛(wèi)星在軌測(cè)試表明,該方法控制有效,可以作為其他型號(hào)的參考。后續(xù)根據(jù)在軌型號(hào),將進(jìn)一步優(yōu)化模型和誤差分析方法,進(jìn)一步提高控制的精度。
猜你喜歡
吉林廣播電視大學(xué)學(xué)報(bào)(2021年4期)2022-01-14 02:35:48
石油瀝青(2021年4期)2021-10-14 08:50:44
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2018年11期)2018-11-23 09:47:26
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
資源再生(2017年3期)2017-06-01 12:20:59
中國(guó)教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
