基于BP 神經(jīng)網(wǎng)絡和遺傳算法的永磁同步電機控制系統(tǒng)*
2020-12-25 08:41:54李昌奇何志琴鄭自偉
微處理機 2020年6期
李昌奇,何志琴,鄭自偉
(1.貴州大學電氣工程學院,貴陽550025;2.貴州航天林泉電機有限公司,貴陽550025)
1 引 言
隨著電力電子技術、新型電機控制理論和稀土永磁材料的快速發(fā)展,永磁同步電機以其功率密度大、效率高、控制性能優(yōu)越及抗過載能力強等優(yōu)點,被廣泛應用于數(shù)控機床、汽車、航天航海等領域[1]。
在永磁同步電機控制系統(tǒng)中,經(jīng)典的PID 算法簡單實用,Ziegler 和Nichols 提出了一種著名的PID控制器整定的經(jīng)驗公式[2],但響應曲線有一定程度的超調量。非線性控制中的自適應控制效果較好,不過算法相對較為復雜[3]。滑模控制具有快速性、強魯棒性等優(yōu)點,但必須要解決系統(tǒng)的抖振問題[4]。傳統(tǒng)的控制方法已經(jīng)難以滿足系統(tǒng)響應速度快、魯棒性好等控制要求,智能控制以其獨特的優(yōu)點被廣泛應用于電機驅動中,采用智能算法優(yōu)化PI 控制器參數(shù)的永磁同步電機控制策略,可以達到控制系統(tǒng)的要求,具有一定的可行性和實際意義。
基于現(xiàn)有研究背景,在此提出一種利用BP 神經(jīng)網(wǎng)絡和遺傳算法對PI 控制器參數(shù)進行離線整定的方法,解決永磁同步電機轉速PI 控制器參數(shù)難整定而導致的電機控制效果不理想的問題,其所做的優(yōu)化可改善永磁同步電機的動靜態(tài)性能。首先將永磁同步電機實驗數(shù)據(jù)作為數(shù)據(jù)樣本來訓練BP 神經(jīng)網(wǎng)絡,然后用遺傳算法尋優(yōu)出速度PI 控制器的最優(yōu)參數(shù)值,最后在MATLAB/Simulink 軟件仿真驗證方法的可行性。
2 永磁同步電機的數(shù)學模型
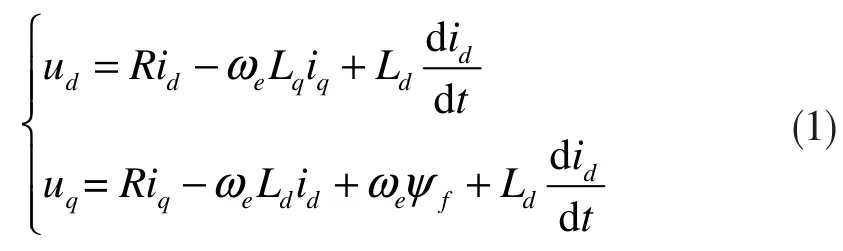
控制對象的數(shù)學模型應能夠反應被控系統(tǒng)的靜態(tài)特性,才能準確建立永磁同步電機數(shù)學模型[5]。首先做如下假設:①忽略電機鐵心的磁飽和,不計鐵心的渦流損耗與磁滯損耗,永磁體電導率為0;②三相繞組對稱在空間中互差,標準Y 型連接,忽略空間諧波。在同步旋轉坐標系d-q 下建立數(shù)學模型,定子電壓方程如下:
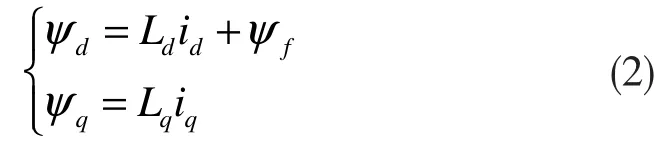
定子磁鏈方程為:
電磁轉矩方程為:

轉速PI 控制器傳遞函數(shù)為:

式(1)~(3)中,ud、uq分別表示定子電壓在 d-q 軸的分量,id、iq分別表示定子電流在d-q 軸的分量,R是定子電阻,ψd、ψq表示定子磁鏈在 d-q 的分量,ωe表示機械角速度,Ld、Lq分別表示在d-q 軸上的電感,ωf是永磁體的磁鏈,Pn是電機的極對數(shù)。
3 永磁同步電機矢量控制
基于BP 神經(jīng)網(wǎng)絡和遺傳算法的永磁同步電機矢量控制如圖1 所示。采用矢量速度、電流雙閉環(huán)對永磁同步電機進行控制。內環(huán)為電流環(huán),作用是限制最大電流,使電機在起動過程中有足夠大的加速轉矩,保證電機的穩(wěn)定運行。外環(huán)為速度環(huán),作用是增強電機的抗負載擾動能力和抑制轉速的波動,保證系統(tǒng)的靜態(tài)和動態(tài)性能。速度環(huán)與電流環(huán)之間實現(xiàn)串級聯(lián)結,速度環(huán)的輸出作為電流控制器的電流給定信號,電流環(huán)的輸出電壓作為驅動電路的PWM 控制電壓[6]。由于控制系統(tǒng)的動態(tài)響應性能與速度環(huán)密切相關,因此采用BP 神經(jīng)網(wǎng)絡和遺傳算法進行速度PI 控制器參數(shù)的離線整定優(yōu)化,從而實現(xiàn)永磁同步電機轉速控制的平穩(wěn)性和快速性。
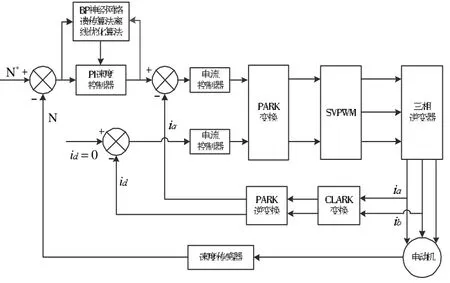
圖1 永磁同步電機矢量控制框圖
4 控制器參數(shù)整定
4.1 BP 神經(jīng)網(wǎng)絡建模
PID 控制在線性系統(tǒng)控制領域中技術成熟,應用普遍,但在高度耦合、復雜的非線性系統(tǒng)中有很大局限性[7]。BP 神經(jīng)網(wǎng)絡是一種多層前饋網(wǎng)絡,其主要特點是信號前向傳遞,誤差反向傳播[8]。不僅有很強的非線性擬合能力,而且能以任意精度逼近任意非線性連續(xù)函數(shù),解決復雜的非線性系統(tǒng)控制問題。
BP 神經(jīng)網(wǎng)絡被用來擬合PI 控制器的比例、積分參數(shù)和相應的永磁同步電機動態(tài)響應性能之間的非線性關系,永磁同步電機的動態(tài)響應性能用階躍響應的最大峰值M0和上升時間Ts來衡量。那么需要建立一個兩輸入兩輸出的BP 神經(jīng)網(wǎng)絡模型,經(jīng)過實驗確定隱含層層數(shù)為7,因此BP 神經(jīng)網(wǎng)絡模型結構為2-7-2,其拓撲結構如圖2 所示。
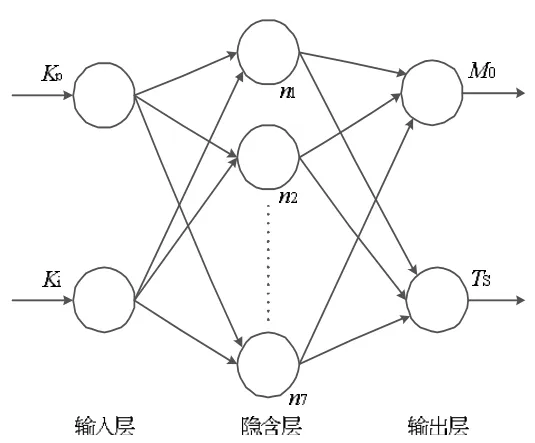
圖2 BP 神經(jīng)網(wǎng)絡結構
BP 神經(jīng)網(wǎng)絡模型初始權值參數(shù)均采用[-0.5,0.5]區(qū)間上的隨機數(shù),輸入層為等值模型,其輸出層等于輸入層,如下式:

BP 神經(jīng)網(wǎng)絡隱含層的輸入輸出分別為:
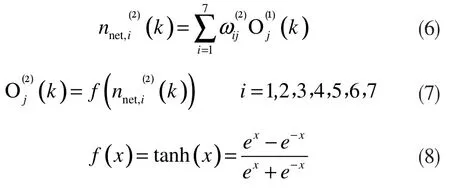
BP 神經(jīng)網(wǎng)絡輸出層的輸入輸出分別為:
BP 神經(jīng)網(wǎng)絡是個不斷學習的過程,需要考察學習次數(shù)的性能指標函數(shù),此處性能指標函數(shù)為:

按照梯度下降法修正網(wǎng)絡的權系數(shù),即E(k)對加權系數(shù)的負梯度方向搜索調整,并附加一個使搜索快速收斂全局極小的慣性項,則有:

式中,η 為學習速率,α 為慣性系數(shù)。
4.2 遺傳算法控制器參數(shù)優(yōu)化
遺傳算法(Genetic Algorithms)是 1962 年由美國Michigan 大學Holland 教授提出的模擬自然界遺傳機制和生物進化論而成的一種并行隨機搜索最優(yōu)化方法[9]。因為遺傳算法獨特的工作原理,使它能夠在復雜空間進行全局優(yōu)化搜索,可適用于求解非線性、不可導系統(tǒng)的最優(yōu)解[10]。
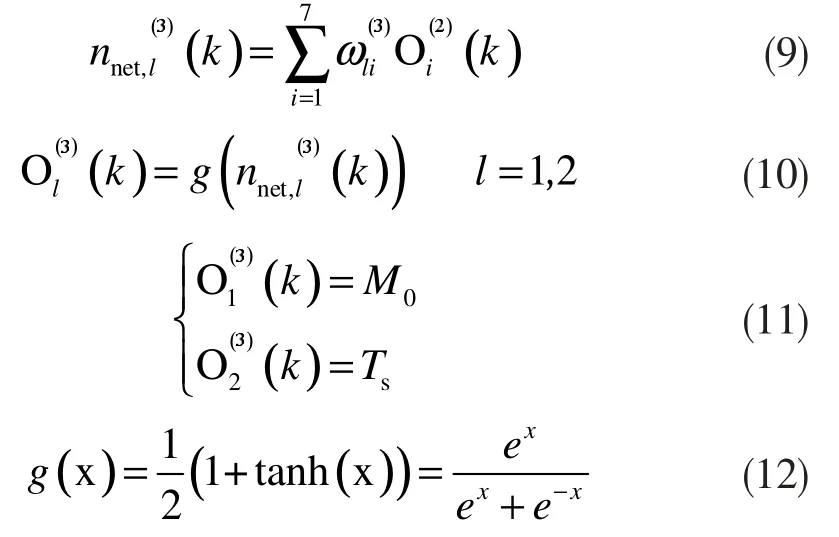
BP 神經(jīng)網(wǎng)絡聯(lián)合遺傳算法進行最佳PI 控制器參數(shù)尋優(yōu)流程如圖3 所示。
圖3 BP 神經(jīng)網(wǎng)絡和遺傳算法極值尋優(yōu)流程圖
染色體的適應度函數(shù)為:

首先遺傳算法隨機產(chǎn)生一個種群,調用建立的BP 神經(jīng)網(wǎng)絡模型計算群體中的個體適應度,Kp和Ki是 BP 神經(jīng)網(wǎng)絡模型的輸入,M0和 Ts是 BP 神經(jīng)網(wǎng)絡的輸出,將M0和Ts作為遺傳算法適應度函數(shù)的參數(shù)。然后根據(jù)計算個體適應度值進行個體的選擇,交叉和變異操作,使適應度值好的個體被保留,適應度差的個體被淘汰,不斷循環(huán)直到滿足遺傳算法的終止條件。當系統(tǒng)的最大峰值和上升時間最小時,適應度函數(shù)最小時所對應的PI 控制器參數(shù)Kp和Ki為最優(yōu)。
5 實驗仿真與分析
為驗證所提出方法,運用MATLAB/Simulink 軟件對控制系統(tǒng)進行建模與仿真。經(jīng)系統(tǒng)實驗得到60組輸入輸出數(shù)據(jù),用來進行BP 神經(jīng)網(wǎng)絡的訓練和測試,BP 神經(jīng)網(wǎng)絡結構為2-7-2,學習速率η=0.1,慣性系數(shù)α=0.8,迭代1000 次,誤差精度為0.00001。表1 為BP 神經(jīng)網(wǎng)絡訓練預測輸出與實際輸出的實驗對比。圖4 為最大峰值M0的變化曲線圖。圖5 為上升時間Ts的變化曲線圖。由圖表可知,訓練得到的BP 神經(jīng)網(wǎng)絡模型具有較高預測精度,其10 組預測輸出和實際輸出相差不大,最大誤差不超過5%。
遺傳算法初始種群隨機產(chǎn)生,種群的大小為30,染色體采用實數(shù)編碼,由Kp和Ki組成,采用輪盤賭法進行選擇操作, 交叉操作比例為0.4,采用實數(shù)交叉法,變異操作比例為0.2,迭代次數(shù)是100 次,30 對 Kp、Ki隨機確定,取值范圍為(0.005~1)和(0~10)之間。圖6 為適應度曲線變化曲線,經(jīng)過100 次迭代,適應度函數(shù)值f 取得最小值為10658,對應最優(yōu)PI 控制器參數(shù)為Kp=0.42,Ki=2.163。
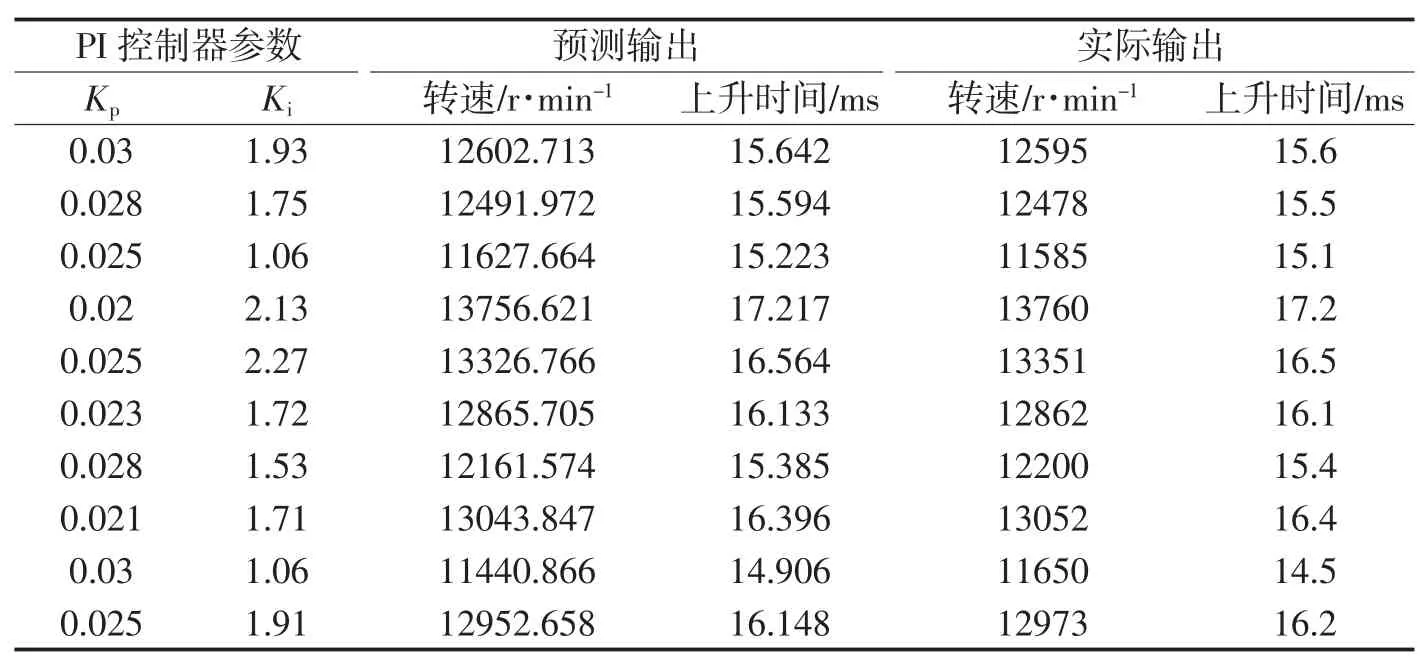
表1 BP 神經(jīng)網(wǎng)絡訓練輸出數(shù)據(jù)表
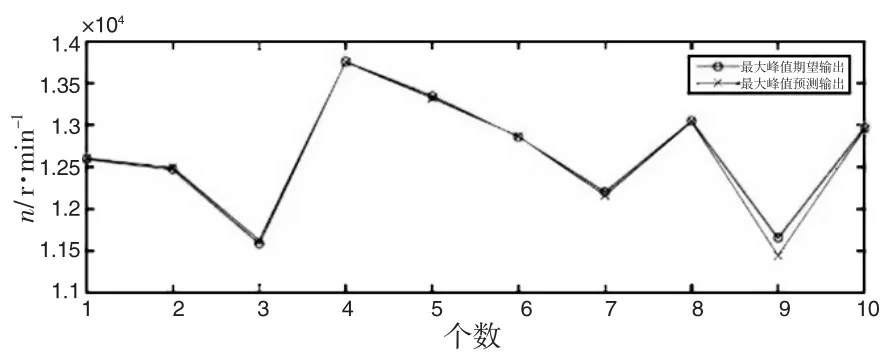
圖4 最大峰值變化圖
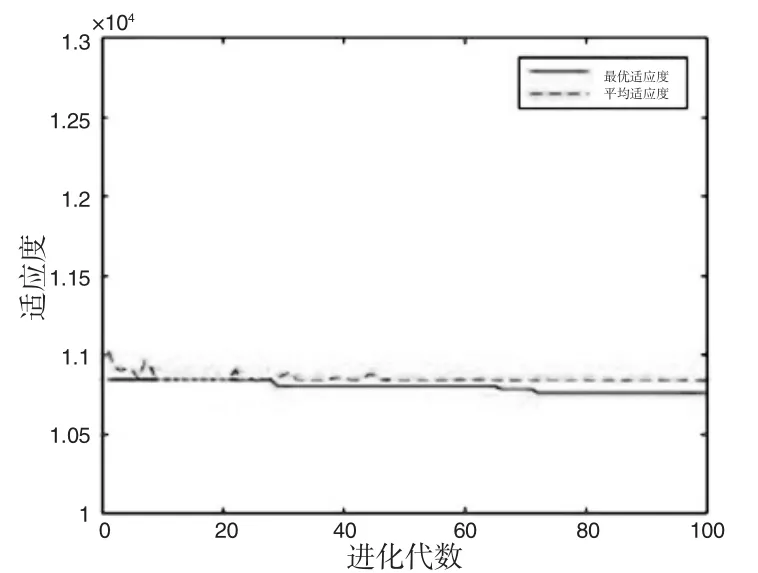
圖6 適應度函數(shù)變化圖
系統(tǒng)仿真的永磁同步電機參數(shù)以實際所用電機參數(shù)為參考,具體為:相間電阻Rs=0.396 Ω,相間電感 L=0.000708 H,阻尼系數(shù) B=0.0008 N·m·s,磁極對數(shù) P=2,給定磁鏈 ψf=0.0368 Wb,轉動慣量 J=3×10-5kg·m2。永磁控制系統(tǒng)空載運行,參考轉速n =10000 r/min,仿真時間 t=0.4s。表 2 為傳統(tǒng) PID 算法參數(shù)值和本方法得到的參數(shù)值對比,永磁同步電機轉速仿真曲線如圖7 所示。

表2 PI 控制器參數(shù)值
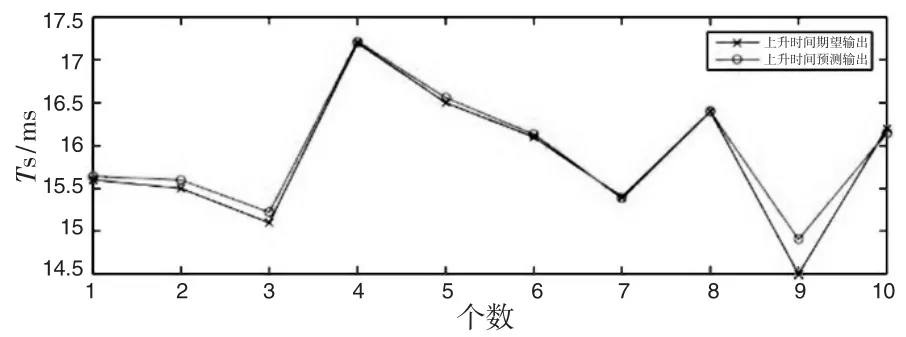
圖5 上升時間變化圖

圖7 永磁同步電機轉速仿真曲線
圖中實線和虛線分別表示BP-GA 控制器和傳統(tǒng)PID 控制器下電機的轉速仿真曲線。傳統(tǒng)PID 控制算法下,電機超調量較高,上升時間為0.016 s。本算法中,電機超調量明顯減小,上升時間為0.013s。仿真結果表明,使用BP-GA 控制算法下系統(tǒng)的超調量較小,電機啟動后的很短時間內能很快穩(wěn)定并逼近于給定轉速。
6 結束語
針對永磁同步電機控制系統(tǒng)PI 控制器參數(shù)難整定導致控制效果不理想問題,結合BP 神經(jīng)網(wǎng)絡和遺傳算法的優(yōu)點,提出一種基于BP 神經(jīng)網(wǎng)絡和遺傳算法的永磁同步電機系統(tǒng)PI 控制器參數(shù)離線整定方法。通過仿真實驗說明,與傳統(tǒng)PID 控制算法的控制性能相比,該方法能明顯改善系統(tǒng)的控制效果,同時也驗證了該方法的可行性和正確性。