智能汽車高速換道避障安全車距仿真分析*
2021-01-04 05:23:22彭濤劉興亮方銳蘇麗俐王濤趙若愚
汽車工程師 2020年12期
彭濤 劉興亮 方銳 蘇麗俐 王濤 趙若愚
(1.天津大學電氣自動化與信息工程學院;2.中國汽車技術研究中心有限公司;3.天津職業技術師范大學汽車與交通學院)

當前,隨著汽車保有量的快速增長,交通事故頻發,嚴重制約經濟發展和社會和諧。在各類交通事故原因中,人是最主要的因素[1-2]。智能汽車高速換道軌跡規劃,是保證車輛安全、舒適、高效行駛的關鍵所在。國內外在換道模型和安全車距計算方法方面開展了廣泛研究,但不管是基于傳統路徑規劃方法[3-4],還是AI(人工智能)算法[5],都難以從人機—車—道路的角度對其開展較全面的定性和定量化分析。因此,文章基于車輛高速換道運動特性和路徑影響因素分析,提出綜合考慮人機—車—環境因素的智能汽車換道軌跡和安全車距建模方法,解決了多因素影響下的智能汽車高速換道安全車距定量計算問題,經過驗證,達到預想的效果。
1 智能汽車高速換道場景建模仿真
1.1 車輛高速換道運動特性
分別定義地面坐標系和車輛坐標系,汽車換道平面運動,如圖1 所示。

圖1 汽車換道平面運動示意圖
圖 1 中:XOY 為地面坐標系,xoy 為車輛坐標系,SX和SY分別為汽車在XOY 下的橫向和縱向位置坐標,Pr為汽車在XOY 下規劃路徑的參考點,SXr和SYr分別為參考點Pr的橫向和縱向位置坐標,φv為汽車運動橫擺角。在整車坐標系XOY 下,汽車完成高速換道時,理想的側向位移是道路的寬度(一般為3.75 m)。不同的轉向輸入(如頻率和轉角)條件下,汽車完成換道的時間不同。
1.2 智能汽車高速換道建模
文章基于汽車自動駕駛仿真軟件PreScan 搭建智能駕駛仿真平臺,構建智能汽車高速換道場景仿真模型,對車輛動力學特性和智能駕駛路徑規劃等方面開展仿真分析。
仿真場景為某國內開發的智能汽車高速換道場景,高速道路為雙向雙車道平直路面,車道的寬度為3.75 m,本車(智能汽車)初始所在車道為慢車道,前方有低速行駛車輛,左側快車道前、后方均有車輛行駛。本車通過前/后毫米波雷達檢測周圍車輛的相對速度和距離,構建的智能汽車高速換道場景和車輛動力學模型,如圖2 所示。

圖2 基于PreScan 的智能汽車高速換道場景和動力學模型構建
1.3 智能汽車高速換道仿真
設置路面附著系數為0.85,當車速為120 km/h(約33.33 m/s)、轉向頻率分別為 0.3,0.4,0.5 Hz 時,汽車高速換道軌跡和運動狀態變化,如圖3 所示。

圖3 汽車高速換道軌跡和運動變化情況
從圖3 可以看出:在一定車速、不同轉向頻率輸入的條件下,汽車側向位移約為3.75 m(等于車道寬度),表明汽車完成側向換道;在換道過程中,考慮到汽車轉向引起的縱向行駛阻力的變化,縱向速度存在一定的波動性,且轉向頻率越大,波動性越強,但總體誤差控制在1%以內;隨著轉向頻率的增大,汽車的側向速度峰值增大,且達到峰值對應的時間點分別為1.73,1.3,1.08 s,響應時間隨之減小;橫擺角的變化趨勢與側向速度一致,達到峰值對應的時間點分別為1.68,1.28,1 s,與側向速度的時間延遲在 0.1 s 內;側向加速度和橫擺角速度呈近似正弦波變化趨勢,側向加速度峰值分別達到0.22g,0.38g,0.56g,橫擺角速度峰值分別達到 11.22,6.83,3.82(°)/s,隨轉向頻率增加呈明顯的增大趨勢。因此,當汽車高速換道時,可近似認為縱向速度恒定,側向速度和橫擺角呈現較為一致的單峰變化趨勢,并且峰值及梯度隨轉向頻率的增大而增大,梯度所體現的汽車側向加速度和橫擺角速度峰值,會對駕乘舒適性產生較大影響,梯度值越大,舒適性越差,當轉向頻率達到0.5 Hz 時,側向加速度峰值超過0.5g(附著狀態良好的路面上一般不大于0.4g),難以保證駕乘舒適性。
2 汽車高速換道避障安全車距計算
智能汽車為躲避前方低速障礙車,采用換至臨近車道的方式進行避撞,可有效降低換道安全車距,提高通行效率。智能汽車要實現安全合理地換道避障,首先,在安全性方面,要保證正確、及時并準確地決策和執行,一方面確保與原車道前方車輛安全避撞,另一方面還要防止與目標車道前、后方車輛發生碰撞,此外,換道后要保證汽車及時回正,最終位于目標車道中心線上并繼續直線行駛。其次,考慮到駕乘人員的舒適性,確保換道在較小的側向運動變化下進行。以上條件與智能系統、車輛、道路及周圍環境條件密切相關。
為避免智能汽車與前車和換道目標車道內的汽車發生碰撞,汽車換道安全避撞的臨界位置關系,如圖4所示。

圖4 汽車換道安全避障的臨界位置關系
圖4 所示的狀態為智能汽車與前方汽車安全換道避障的臨界狀態,此時汽車換道時間為tc,對應的本車換道側向位移為Y(tc),橫擺角為φ(tc),為保證換道避撞的安全性,本車與周圍汽車的運動狀態應滿足:

其中,φ(tc)可表達為:

式中:B
0——本車寬度,m;
B1——原車道前方障礙車寬度,m;
a——本車的前懸長度,m;
b——本車的軸距,m;
b'——本車的后懸長度,m;
X(tc)——tc時間內本車的縱向位移,m;
X1(tc)——tc時間內原車道內障礙車的縱向位移,m;
X2(tc)——tc時間內目標車道前方汽車的縱向位移,m;
X3(tc)——tc時間內目標車道后方汽車的縱向位移,m;
ΔL1——本車換道開始時刻與本車道前方障礙車的縱向間距,m;
ΔL2——本車換道開始時刻與目標車道前方汽車的縱向間距,m;
ΔL3——本車換道開始時刻與目標車道后方汽車的縱向間距,m;
ls——保守安全車距,m;
VX3(tc)——tc時刻目標車道前方汽車的縱向速度,m/s;
VX2(tc)——tc時刻目標車道后方汽車的縱向速度,m/s;
VX(tc)——tc時刻本車縱向速度,m/s;
VY(tc)——tc時刻本車側向速度,m/s;
Δt——積分微小時間段,s。
在本車換道過程中,應保證汽車側向位移不超出目標車道,并且為保證舒適性,換道過程中的側向加速度在舒適性要求的范圍內,可表達為:

式中:B——車道寬度,m;
Y(t)——t 時間內本車的側向位移,m;
aY(t)——t 時刻本車的側向加速度,m/s2;
aYc——舒適性側向加速度限值,m/s2;
aYmax——地面附著力允許的最大加速度,m/s2。
其中,aYc可根據實際的駕乘感受進行設置,在附著狀態良好的路面上一般不大于0.4g,并且該值不能大于aYmax,具體取值需根據路面附著系數確定。
根據以上約束條件,智能汽車換道避撞原車道前方障礙車的最小安全車距ΔL1min、目標車道后車最小安全車距ΔL2min以及目標車道前車最小安全車距ΔL3min可分別表達為:

根據以上分析可知,智能汽車高速換道安全車距與換道軌跡有直接關系,而換道軌跡與人機、汽車及道路等因素密切相關。因此,智能汽車決策系統的反應時間、汽車的靜/動態參數和道路附著系數以及周圍汽車運動狀態等都會對汽車高速換道運動特性和避障安全車距產生影響。
3 換道避障安全車距影響因素分析
為了獲得換道避障安全車距,首先要對智能汽車換道軌跡進行分析。將智能汽車換道完成時間和縱向位移、側向加速度峰值作為評價指標,并且定義汽車換道完成狀態為智能駕駛系統開始換道決策至汽車到達目標車道(側向位移第1 次達到車道寬度)。通過改變智能駕駛系統的反應時間、汽車結構和運動參數、道路附著系數等,分析人機、汽車和道路等因素對高速換道的影響。
3.1 智能駕駛系統反應時間的影響
智能駕駛系統的工作過程包括環境感知、決策規劃和執行控制,反應時間是該系統接收環境感知信息后進行行為決策、路徑規劃并開始執行的時間,包含整個決策規劃的時間歷程。傳統汽車高速換道軌跡取決于駕駛員的反應時間,同樣,智能駕駛系統的反應時間與智能汽車高速換道軌跡密切相關,進而影響避障安全車距。
設置道路為平直路面,車道寬度為3.75 m,路面附著系數為0.85,汽車的行駛速度為120 km/h(約33.33 m/s)、轉向頻率為0.4 Hz,當系統反應時間分別為0.25,0.50,0.75 s 時,汽車的換道軌跡和側向速度,如圖5 所示。

圖5 不同反應時間對換道軌跡和側向運動的影響
從圖5 可以看出,由于智能反應時間決定了汽車高速換道轉向的執行時間,從而影響汽車的行駛軌跡,在不同反應時間的情況下,換道完成時間會相應地延遲0.25 s,在縱向速度為33.33 m/s 時,對應的換道完成縱向位移也相應地增加8.33 m,此時側向速度會相應延遲,但是側向加速度的峰值不變。因此,在汽車換道避撞過程中,隨著反應時間的增加,汽車換道行駛軌跡和側向速度延遲時間會相應地增加,這必然會增大避障安全車距。為提高避障安全性,有必要盡可能減小反應時間,加快系統決策規劃的速度。
3.2 智能汽車參數的影響
3.2.1 橫擺轉動慣量的影響
設置道路為平直路面,車道寬度為3.75 m,路面附著系數為 0.85,車速為 120 km/h(約 33.33 m/s)、轉向頻率為0.4 Hz,當汽車的橫擺轉動慣量(I)z分別為1 000,2 000,3 000 kg·m2時,汽車的換道軌跡和側向速度,如圖6 所示。


圖6 不同橫擺轉動慣量對換道軌跡和側向運動的影響
從圖6 可以看出,當汽車橫擺轉動慣量增大時,汽車的換道完成時間和縱向位移隨之增大,分別為2.47,2.51,2.67 s 和 82.01,83.34,88.68 m,換道完成效率降低,縱向距離增加;側向加速度峰值分別為0.376g,0.376g,0.371g, 對 應 的 峰 值 時 間 分 別 為0.66,0.69,0.71 s,峰值變化較小,響應時間隨之增大。因此,橫擺轉動慣量的增加會增大汽車轉向運動的響應時間,在相同條件下,同樣會增加避障安全車距。
3.2.2 車速的影響
根據汽車換道安全車距計算公式,車速是影響換道安全車距的重要因素。設置道路為平直路面,車道寬度為3.75 m,路面附著系數為0.85,轉向頻率為0.4 Hz,當汽車的行駛速度(v)分別為 100,110,120 km/h 時,汽車的換道軌跡和側向速度,如圖7 所示。
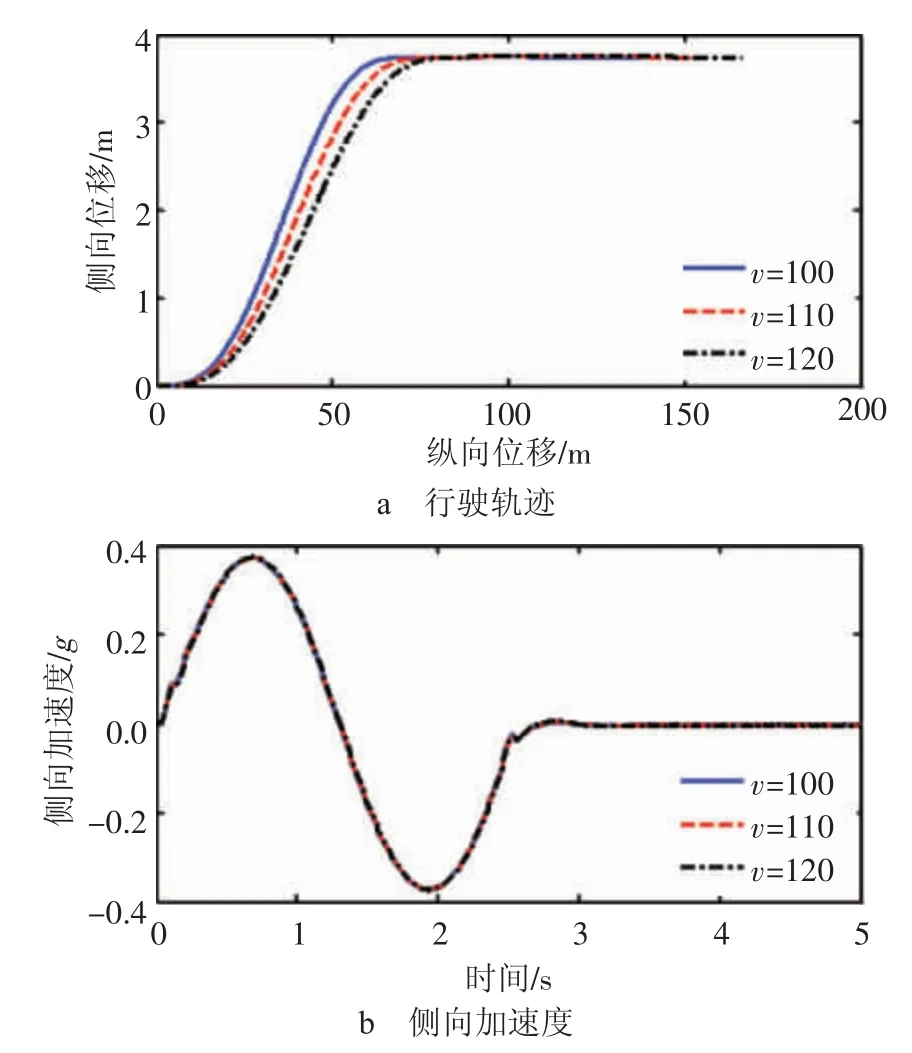
圖7 不同車速對換道軌跡和側向運動的影響
從圖7 可以看出,隨著車速的增加,汽車的換道完成時間和縱向位移隨之增大,分別為2.95,2.71,2.51 s和81.63,82.49,83.34 m,雖然提高了換道完成效率,但是縱向距離增加,在換道過程中汽車側向加速度響應基本一致,最大值均為0.376g。因此,汽車的行駛速度對運動路徑有直接的影響,隨著速度的增大,安全車距增大,而車速對側向加速度響應無直接影響。
3.3 路面附著系數的影響
路面附著系數影響輪胎的地面附著力,與汽車的縱向滑移力和側偏力密切相關,因此,路面附著條件影響汽車的制動和轉向動態響應,而路面附著系數的改變必然導致汽車高速換道軌跡和運動響應的改變。通過改變路面附著系數,分析路面附著條件對換道完成時間的影響。
設置道路為平直路面,車道寬度為3.75 m,汽車的行駛速度為120 km/h(約33.33 m/s)、轉向頻率為0.4 Hz,智能系統反應時間為0.25 s,當路面附著系數(μ)分別為0.35,0.60,0.85 時,汽車的換道軌跡和側向速度,如圖8 所示。

圖8 不同路面附著系數對換道軌跡和側向運動的影響
從圖8 可以看出,隨著路面附著條件的改善和附著系數的增加,汽車的換道完成時間和縱向位移分別為 2.95,2.72,2.51 s 和 98.01,92.34,83.34 m,換道效率明顯提高;側向加速度峰值分別為0.331g,0.371g,0.376g,對應的峰值時間分別為 0.77,0.72,0.69 s,峰值增大并且響應更快;同時,當附著系數減小至一定值后,側向加速度隨之大幅下降,說明此時輪胎側向附著力已經達到飽和。因此,附著不良的路面會一定程度上增大汽車轉向運動的響應時間,降低換道效率,在相同條件下,同樣會增加避障安全車距。
根據以上分析,換道軌跡對避障安全具有較高的時效性,換道軌跡所體現出的換道完成效率,與汽車橫擺響應的快慢密切相關,受系統決策規劃反應時間、汽車特性參數和道路附著條件的影響。
利用Prescan 搭建的高速換道避障場景,在道路附著條件良好路面上(μ=0.85),提取智能汽車和周圍汽車基礎參數,如表1 所示。

表1 智能汽車和道路環境基礎參數
基于以上設置,根據式(1)~式(4),計算不同的系統反應時間、汽車參數及路面附著系數條件下的智能汽車高速避障安全車距,如表2 所示。
由表2 可見:智能駕駛系統的反應時間對換道避障安全距離影響較大,當反應時間增長100%時,本車與原車道前車安全車距增加約16.5%;橫擺轉動慣量影響較小,當橫擺轉動慣量增加50%,本車與原車道前車安全車距增加約1.8%;車速也是影響縱向安全車距的重要因素,車速每增加10 km/h,安全車距增加約7%;此外,附著系數對安全車距也有一定影響,附著系數降低30%,安全車距增加1%~2%。從本車與目標車道前、后車安全車距的變化趨勢看,各相關因素對安全車距的影響基本一致。在實際情況下,由于本車與周圍汽車的相對速度有較大差異,因此安全車距需要根據具體情況進行量化。
4 結論
利用Prescan 建立智能汽車高速換道避障場景和動力學模型,通過仿真分析,掌握了智能汽車高速換道軌跡等運動特性,提出了適用于智能汽車高速換道避障的安全車距計算模型。通過改變系統反應時間、汽車動態參數和道路附著系數,明確了典型因素對安全車距的影響。基于Prescan 的智能汽車虛擬場景建模仿真為智能駕駛系統的開發提供了可靠的工具,能夠有效提高智能系統開發效率。仿真結果表明,轉向頻率對換道軌跡和側向加速度有直接影響;在轉向頻率相同的情況下,智能汽車換道安全車距與人機—車—路及環境因素密切相關,系統反應時間和汽車速度/加速度是安全車距的主要影響因素,反應時間和車速越大,要求安全車距越大,而汽車的橫擺轉動慣量和路面附著系數也會對安全車距有一定影響,橫擺轉動慣量增大,附著系數降低,都要增加安全車距。在保證安全避障情況下,高速換道路徑規劃考慮了乘員舒適性的要求,保證換道決策規劃兼顧安全、舒適和高效,滿足人的乘坐要求。相關研究涉及智能汽車在典型高速換道避障場景中的路徑規劃問題,可為智能汽車決策規劃系統的研發提供技術參考。
猜你喜歡
汽車與安全(2019年9期)2019-11-22 09:48:03
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50