
客車防側翻控制研究
2021-01-04 09:56:42李勝超楊方媛
裝備機械 2020年4期
□ 李勝超 □ 楊方媛
重慶交通大學 機電與車輛工程學院 重慶 400074
1 研究背景
近年來,我國交通運輸行業發展快速,商用車市場隨之出現普遍繁榮的景象。無論是載客還是貨物運輸,汽車都起著不可取代的作用。專家預測,我國將成為全球最大的汽車交易市場,僅商用車就占據汽車產銷市場的50%以上份額[1]。近年來,汽車在運輸過程中事故發生率有明顯提高,對人們的生命財產安全產生危害。由美國國家公路交通安全管理局的調查統計數據可知,汽車側翻事故的發生數量僅次于汽車碰撞事故,處于第二位,如圖1所示。在汽車側翻時,駕駛員往往來不及采取有效應對措施,從而造成嚴重事故[2-4]。因此,為保證更多出行人員的安全,需要對客車防側翻控制進行研究,這一點顯得尤為重要。
側翻指汽車在行駛過程中繞縱軸線轉動90°或更大角度,導致車身與地面相接觸的一種危險側向運動[5]。導致汽車側翻的原因有多種,總體而言可以分為兩大類,一類是非絆倒型側翻,另一類是絆倒型側翻。非絆倒型側翻指由于汽車曲線運動而引起的側翻。汽車在道路上,尤其是在坡道上轉彎行駛時,過大的側向加速度使左右驅動車輪間的垂直載荷產生位移,導致側翻。絆倒型側翻指汽車在行駛時,與路面上障礙物發生碰撞產生的側翻。筆者提出的客車防側翻控制策略主要針對非絆倒型側翻。
2 客車防側翻控制現狀
目前,國外正在研究的客車防側翻控制技術主要有三方面。第一,防側翻預警系統,以車輛側翻角或側翻加速度為監測指標,檢測下一段時間內是否有側翻傾向,并及時報警。第二,差動制動法,通過對車輛不同的車輪施加不同的制動力,產生相應的橫擺力矩,從而達到減小車輛側向加速度的目的。第三,主動懸架技術,在防抱死制動的基礎上,通過調整左右懸架的行程來實現控制。
1990年,woodrooffe和Thomas等人設計了一種防側翻預警裝置,通過測量內側車輪的側向加速度,并與進行正常值比較,實現報警[6];CHEN Bochiuan等[7]對基于側翻時間的防側翻預警進行研究,根據動力學方程計算側翻時間預測矩陣,使矩陣能夠準確地預測出車輛側翻時刻。但這一預警方法以車輛側傾角作為監測指標,存在一定的弊端,由于車輛側傾角不同,因此無法應用到各種車輛上,通用性較差。朱天軍[8]提出一種改進方案,采用車輛橫向載荷轉移率的改變來判斷是否會發生側翻。
國內的研究主要以主動懸架和差動制動為主。2003年,何峰等[9]采用差動制動技術進行控制仿真,結果表明差動制動技術在很大程度上減小了車輛的側向加速度,可以起到防側翻作用。2008年,宗長富等[10]對重型半掛車進行動力學建模,對其側傾穩定性進行了研究分析。
筆者采用Trucksim軟件,建立客車動力學模型。通過客車側翻因素試驗,分析明確客車側翻誘發因素。選取橫向載荷轉移率作為客車側翻評價指標,并采用比例積分微分控制,通過Matlab/Simulink軟件仿真工具建立有效的防側翻控制器模型。采用Trucksim軟件與Matlab/Simulink軟件進行聯合仿真,在雙移線試驗工況下,證明所提出的防側翻策略的可靠性。
3 客車側翻因素分析
3.1 不同車速
在國內高速公路行駛標準的基礎上,進行雙移線工況試驗。設置客車車速分別為80 km/h、90 km/h、100 km/h。
試驗一對車速為80 km/h和90 km/h的客車進行行車對比試驗,得到客車的側向加速度曲線和側偏角曲線,分別如圖2、圖3所示。
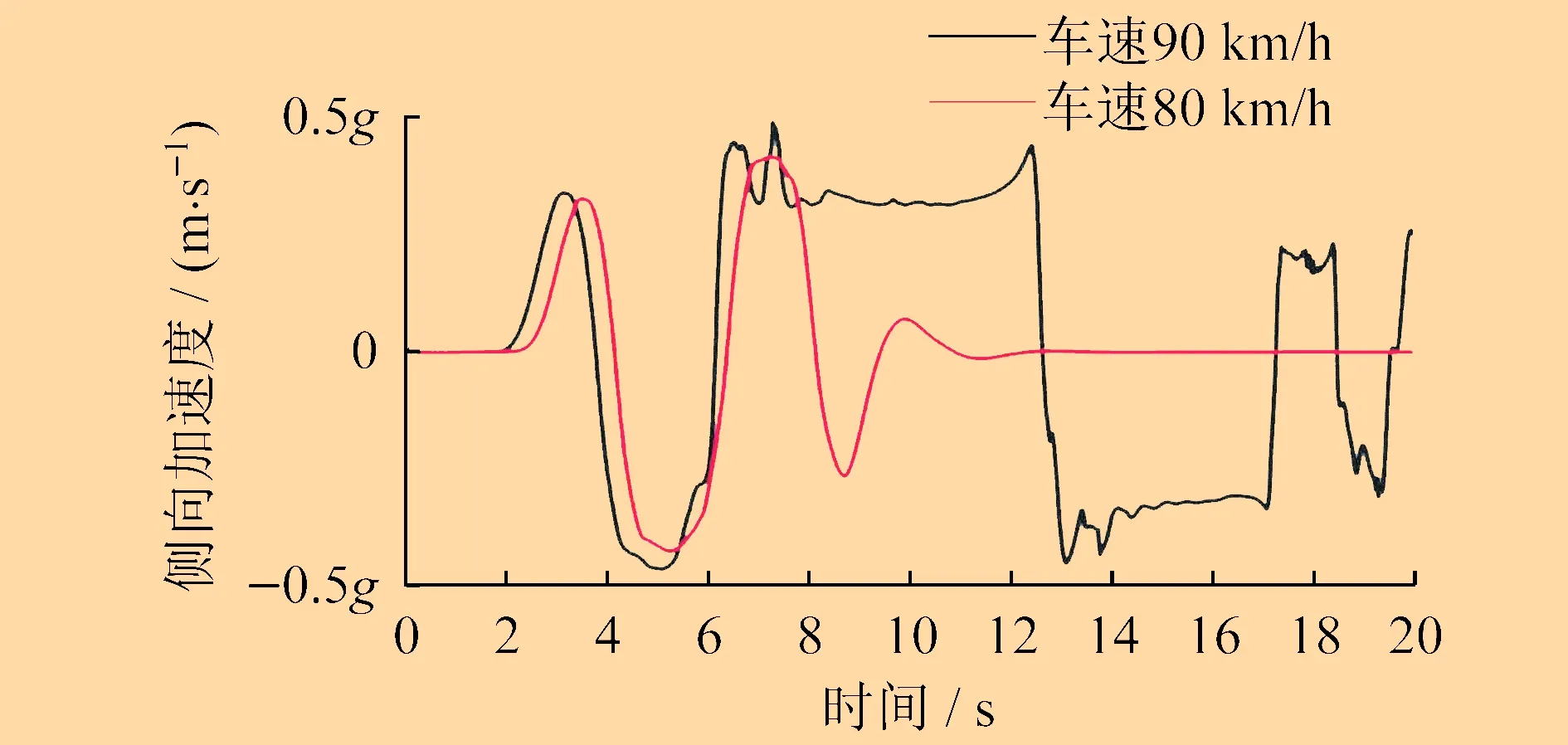
圖2 試驗一客車側向加速度曲線

圖3 試驗一客車側偏角曲線
試驗二對車速為80 km/h與100 km/h的客車進行行車對比試驗,得到客車的側向加速度曲線和側偏角曲線,分別如圖4、圖5所示。
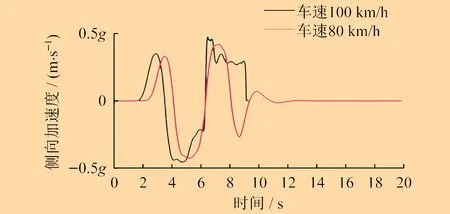
圖4 試驗二客車側向加速度曲線
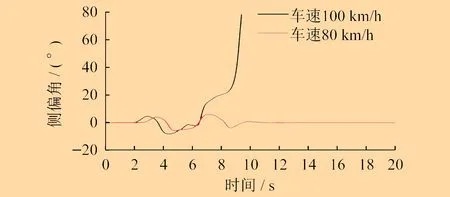
圖5 試驗二客車側偏角曲線
對比以上兩組試驗結果,可以發現車速為80 km/h的客車在時間10 s以后側向加速度與側偏角均逐漸平緩,車速為90 km/h的客車在整個行車過程中側向加速度與側偏角的波動均較大,車速為100 km/h的客車約在時間9 s時側向加速度消失,側偏角驟增,代表發生了側翻。
由試驗可見,車速越快,越容易發生側翻,車速是導致車輛側翻的一個重要因素。
3.2 不同質心高度
車輛質心高度分別設置為1 600 mm、1 700 mm、1 800 mm。
試驗三對質心高度為1 600 mm和1 700 mm的客車進行行車對比試驗,得到客車的側向加速度曲線和側偏角曲線,分別如圖6、圖7所示。
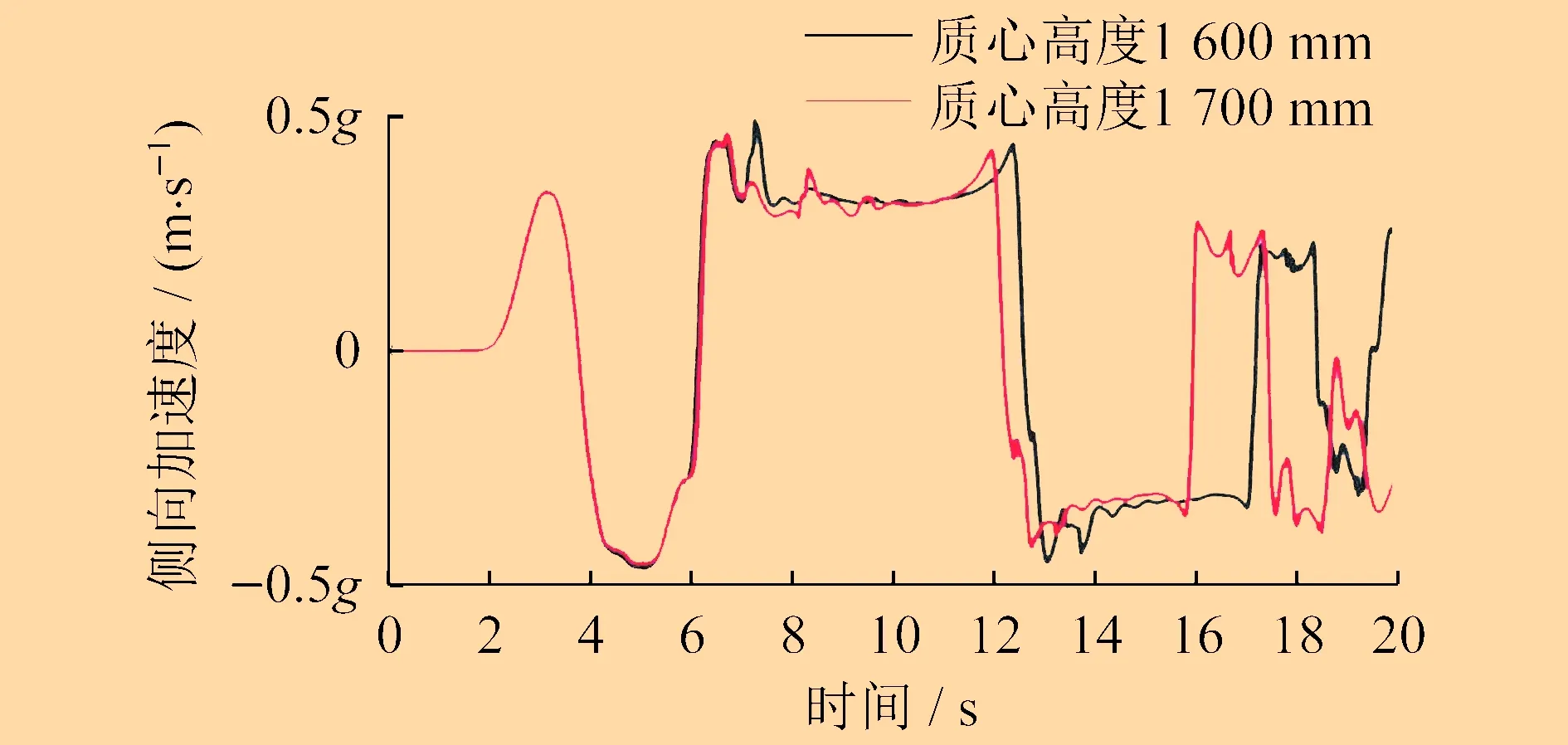
圖6 試驗三客車側向加速度曲線
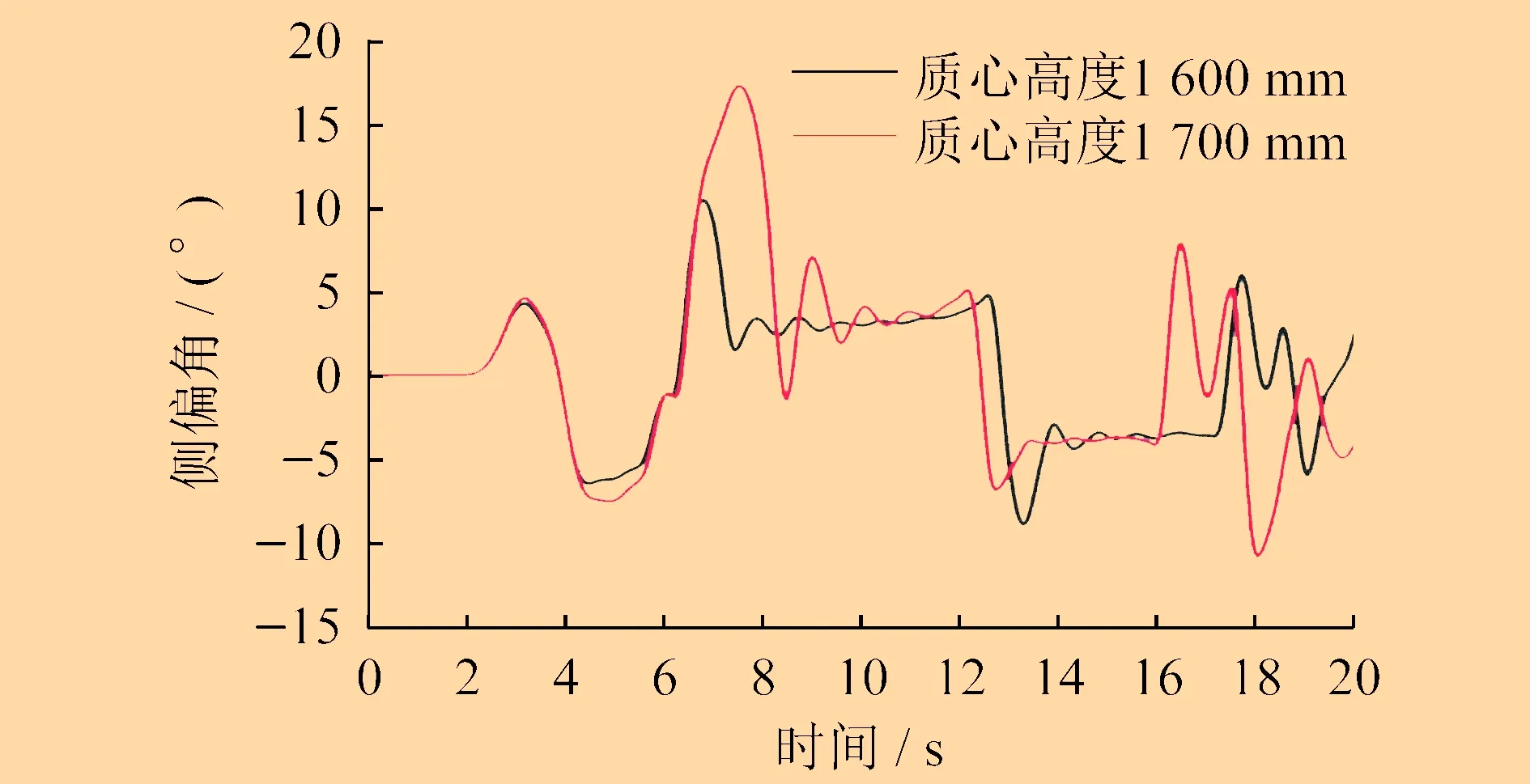
圖7 試驗三客車側偏角曲線
試驗四對質心高度為1 600 mm和1 800 mm的兩客車進行行車對比試驗,得到客車的側向加速度曲線和側偏角曲線,分別如圖8、圖9所示。
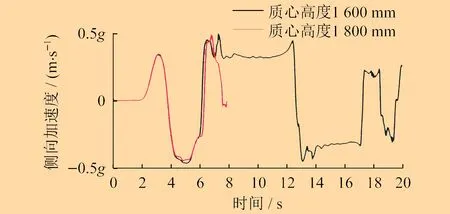
圖8 試驗四客車側向加速度曲線
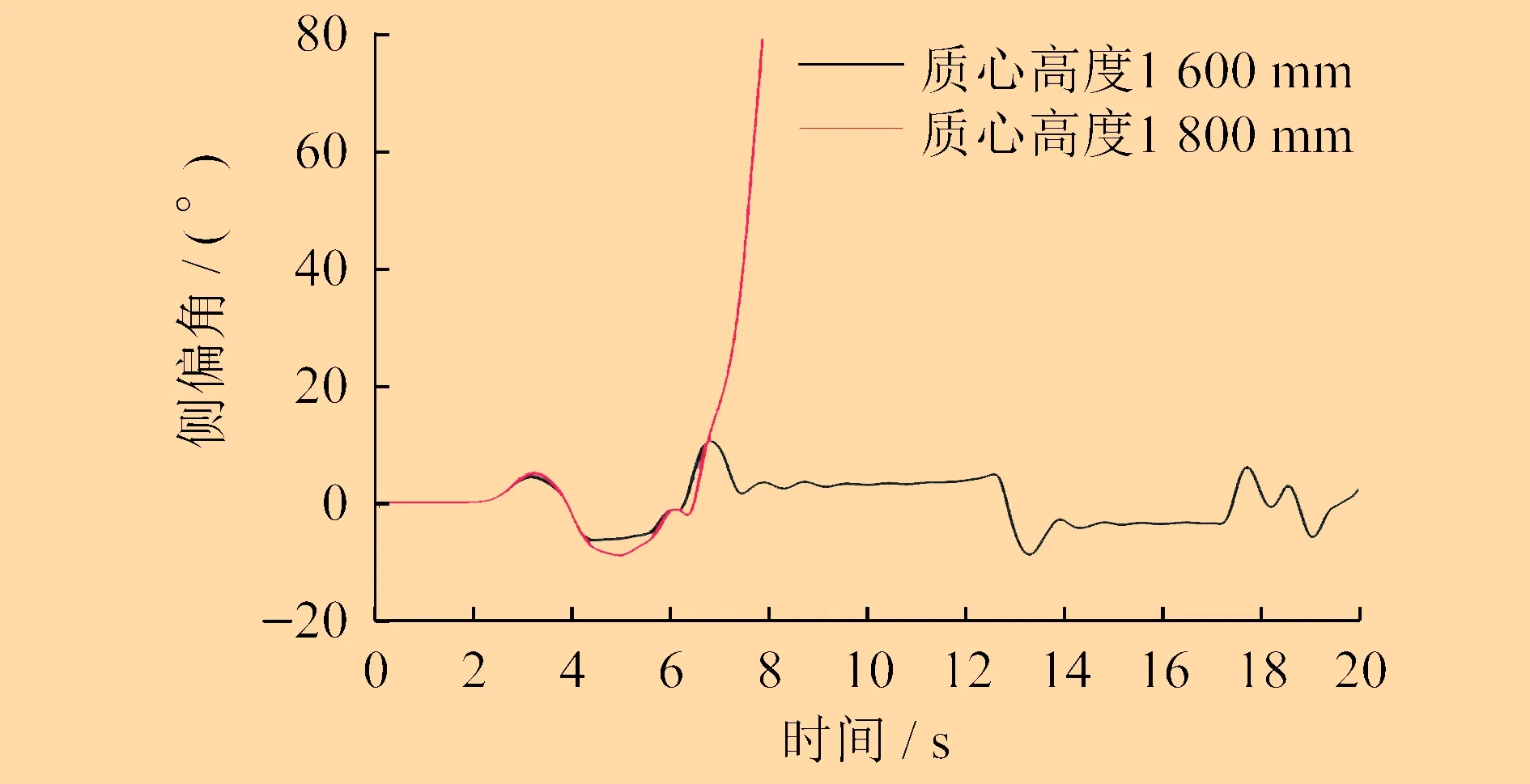
圖9 試驗四客車側偏角曲線
對比以上兩組試驗結果,可以發現,雖然三種不同質心高度的客車在行車過程中均存在一定的不穩定性,但是不穩定性隨著質心高度的增高而不斷提高。質心高度為1 800 mm的客車,約在時間7.5 s時發生了側翻。
由試驗可見,質心高度越高,越容易發生側翻,質心高度是導致車輛側翻的一個重要因素。
4 客車防側翻控制方法
為滿足工業控制和操作簡便的要求,筆者選擇的控制方法為傳統比例積分微分控制。根據所建系統中的誤差,應用比例積分微分數學模型,進行比例、積分及微分運算,最終得到輸出的控制量,即施加在客車前外輪上的制動壓力。比例積分微分控制器結構如圖10所示。

圖10 比例積分微分控制器結構
比例控制的輸出信號與輸入信號的誤差存在一定的比例關系,當系統僅僅受到比例控制時,輸出存在穩態誤差。
積分控制時,輸入信號與輸出信號的積分成正比關系。當引入積分項后,積分項隨時間的推移而逐漸增大,所以系統存在穩態誤差后,積分控制會使系統輸出的施加在客車前外輪上的制動壓力逐漸增大,最終會使穩態誤差調節至零。
微分控制能夠提高系統的動態響應性能,可以通過提前預測偏差,緊急抑制偏差的變化。
筆者采用差動制動技術,對客車左前輪或右前輪進行制動力輸入,產生一個與轉動方向相反的橫擺力矩,從而防止客車側翻。
5 客車防側翻控制系統設計
對客車車輪橫向載荷轉移率進行監測,根據客車運行時的橫擺角速度和側向加速度來判斷客車的轉向狀態。
橫向載荷轉移率L的計算式為:
(1)
式中:FLi、FRi分別為客車軸上左車輪、右車輪輪胎的垂直載荷;n為車軸數,n=2。
當客車運行中橫向載荷轉移率的絕對值大于1時,表明客車發生側翻。應用此數據來監測客車是否會發生側翻,具有良好的普遍性和實用性。
根據客車控制反應時間差,將橫向載荷轉移率的絕對值0.8作為觸發閾值。一旦超過此閾值,觸發器便觸發控制器,對客車進行實時控制。
客車防側翻控制系統如圖11所示。對客車行駛過程進行實時監測,通過橫向載荷轉移率的絕對值來判斷客車是否需要施加防側翻控制。

圖11 客車防側翻控制系統
6 客車防側翻控制系統建模
6.1 橫向載荷轉移率計算模塊
根據客車橫向載荷轉移率計算公式,在Matlab/Simulink軟件中建立橫向載荷轉移率計算模塊,如圖12所示。
6.2 觸發器控制模塊
當客車橫向載荷轉移率絕對值大于0.8時,觸發器開始起到觸發作用。觸發器控制模塊如圖13所示。

圖13 觸發器控制模塊
6.3 比例積分微分控制模塊
比例積分微分控制模塊如圖14所示,以客車側向加速度實際值和參考值之間的差值作為反饋信號,系統輸出的是施加在客車前外輪上的制動壓力。客車側向加速度的參考值為零。
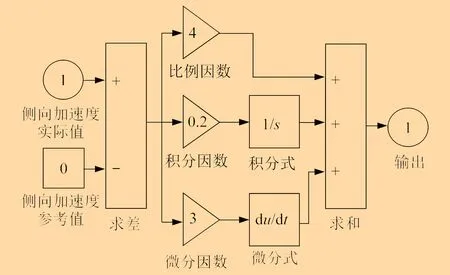
圖14 比例積分微分控制模塊
7 客車系統建模
Trucksim軟件是一款參數化建模軟件,在建模時需要的數據量非常大,數據的真實性越高,所建立的客車模型就越接近真實客車。客車整車模型示意圖如圖15所示。
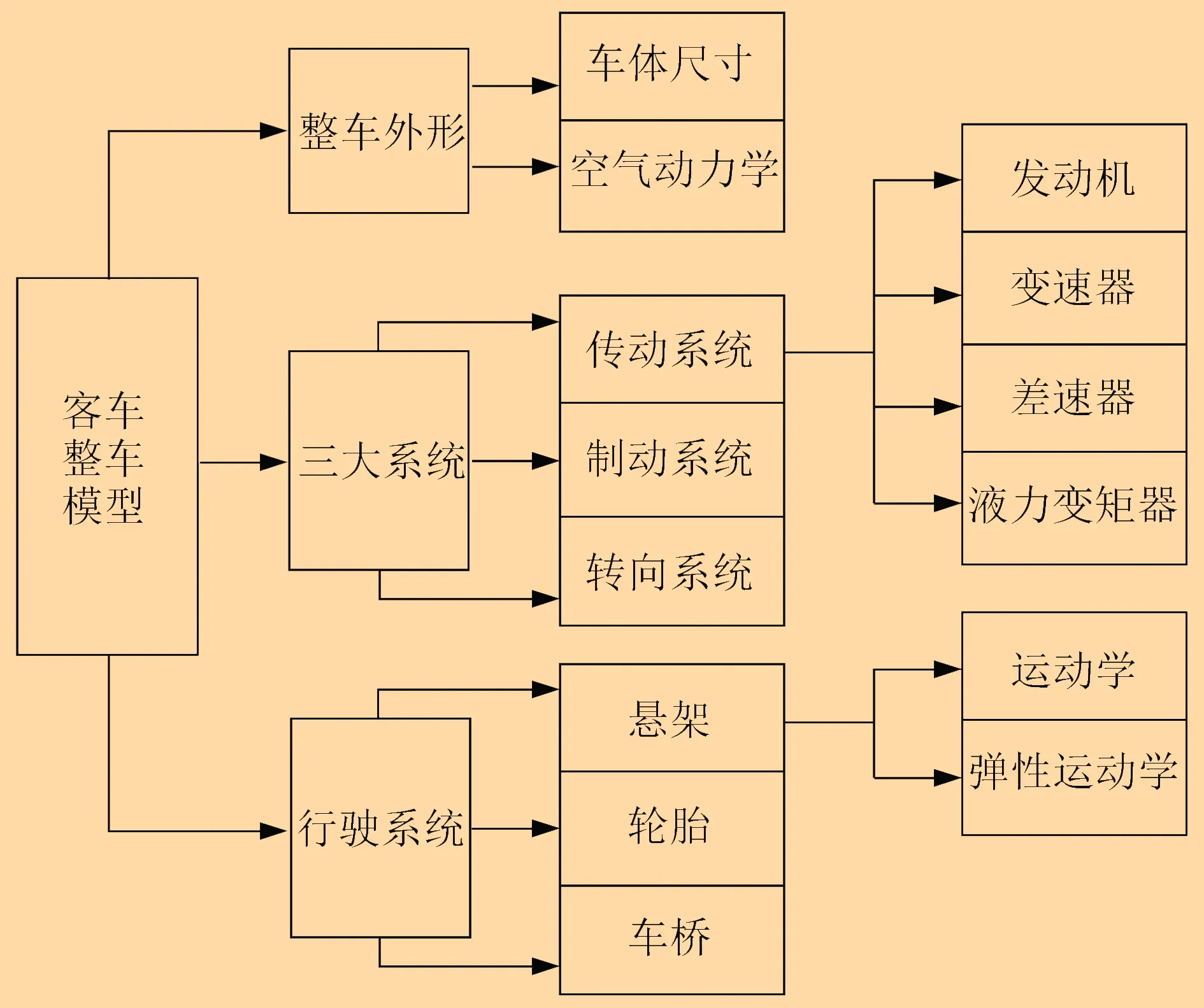
圖15 客車整車模型示意圖
筆者仿真試驗所選用的客車車型為旅游觀光車,客車整車參數見表1。

表1 客車整車參數
空氣動力學參數見表2。客車在行駛過程中受到空氣阻力的作用較大,空氣動力學特性是影響客車性能的重要因素,可以解決客車動力性、安全性方面的諸多問題,并與客車造型技術相互依存[10]。
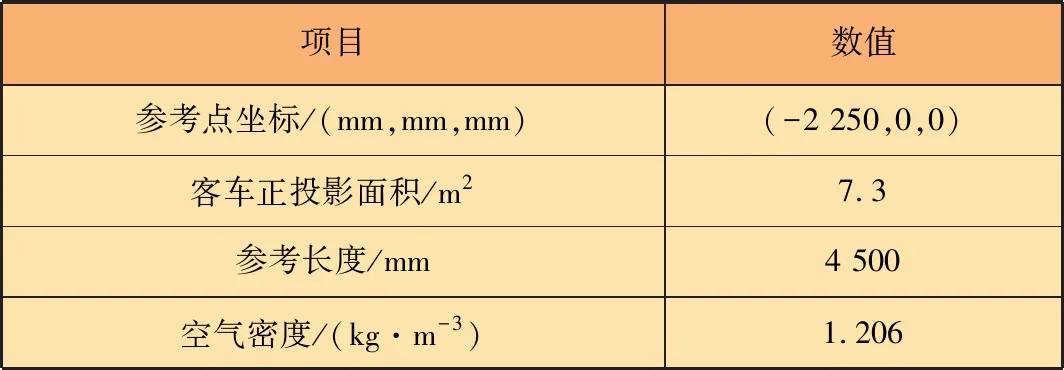
表2 空氣動力學參數
客車傳動系統的作用是將動力由發動機傳輸至驅動輪[11]。仿真試驗中,客車所選用的發動機型號為濰柴WP6.220E50,適用于客車與卡車等車型,為增壓中冷式,六缸直列型,排量為6.75 L,可輸出功率為150 kW,額定轉速為3 000 r/min,最大扭轉轉速為1 200~1 600 r/min,采用直列水冷四沖程濕式缸套。
客車轉向系統的功能是使客車跟隨駕駛員的意圖進行行駛。客車轉向系統主要包括轉向操縱機
構、轉向器、轉向傳動機構三部分[12-13]。
客車制動系統使行駛中的客車停止行駛,下坡時能夠保持客車行駛穩定,并且使已經停止行駛的客車保持不動。
客車懸架及車輪系統參數見表3。懸架的主要作用是傳遞車輪與車架間的力和力矩,緩和沖擊,衰減振動,保證車輪在任何工況下都有比較理想的行駛特性,使客車平順行駛。按照左右兩側車輪是否采用一根整體剛性軸連接,懸架可以分為非獨立懸架和獨立懸架兩種形式。仿真試驗中客車前后輪都采用非獨立懸架,輪胎選取9R22.5型真空輪胎。

表3 客車懸架與車輪系統參數
8 聯合仿真
在Trucksim軟件中輸入兩個變量,分別是客車左前輪制動力、客車右前輪制動力。
Trucksim軟件的輸出變量包括客車左前輪垂直載荷、客車左后輪垂直載荷、客車右前輪垂直載荷、客車右后輪垂直載荷、客車側向加速度、客車質心側偏角、客車橫擺角速度。
將上述參數輸入在Trucksim軟件中建立的客車模型與在Simulink軟件中建立的防側翻控制系統模型,完成聯合仿真系統模型的搭建。
按照國家動態模擬標準,對應用防側翻控制系統的客車進行雙移線試驗,并與無防側翻控制的同種客車進行對比分析。
對質心高度為1 800 mm、車速為100 km/h的客車進行雙移線試驗分析,在其它條件都相同的情況下,有防側翻控制系統控制的客車沒有發生側翻,而沒有防側翻控制的客車發生了側翻。仿真試驗情況如圖16所示。
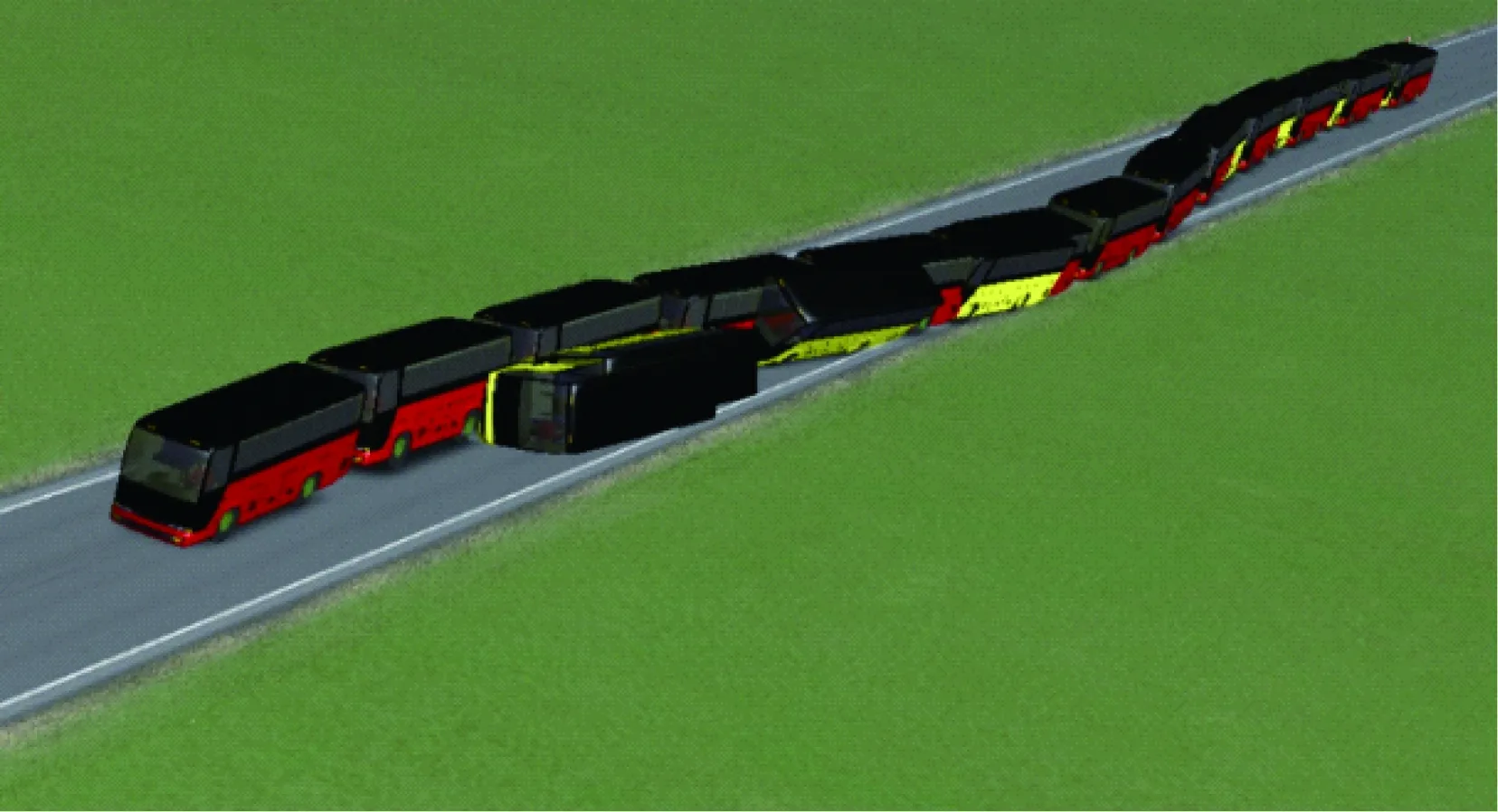
圖16 仿真試驗情況
聯合仿真獲得應用防側翻控制系統的客車的橫向載荷轉移率、質心加速度、橫擺角速度變化狀態,依次如圖17、圖18、圖19所示。
聯合仿真試驗是在質心高度、車速均為客車側翻的極限狀態值時進行的,由圖17、圖18、圖19可知,在客車整個行車過程中,均未發生側翻。雖然前1/3時刻客車載荷轉移率、質心加速度、橫擺角速度均有一定的波動,但是在防側翻控制系統的調控下,這種波動逐漸平穩。

圖17 客車橫向載荷轉移率變化

圖18 客車質心加速度變化

圖19 客車橫擺角速度變化
由仿真試驗可見,這一防側翻控制系統確實起到了良好的控制作用。
9 結束語
筆者以三自由度客車為研究對象,應用Trucksim軟件建立客車模型,進行雙移線試驗與仿真分析,得出車速、質心高度都是引起客車側翻的重要因素。為了更好地對客車行駛過程進行防側翻控制,確保行駛的安全性,建立了基于比例積分微分控制的防側翻控制系統。通過Trucksim軟件與Simulink軟件聯合仿真,驗證了防側翻控制系統的有效性。
