
KUKA機器人硬盤系統安全的研究與風險控制
2021-01-05 07:05:36王欣
設備管理與維修 2020年19期
王 欣
(北京奔馳汽車有限公司,北京 100176)
0 引言
自1962 年美國制造出第一臺實用的示教型工業機器人以來,國際上對工業機器人的開發、研制和應用已有50 多年的歷程了。目前,以日、美、德、法、韓等為代表的許多國家的工業產業日趨成熟和完善。作為先進制造業中不可替代的重要裝備和手段,工業機器人已經成為衡量一個國家制造業水平和科技水平的重要標志。
汽車產業最大特點就是產量高、生產節拍快、產品一致性強,非常適合工業機器人的大規模應用。在整車制造的裝焊工藝中,一條汽車焊裝線從最初的幾臺機器人發展成了幾百臺,甚至上千臺工業機器人相互協作完成不同的制造工序。
1 KUKA 機器人系統簡介
庫卡(KUKA)是Johann Josef 和Jakob Knappich 于1898 年在德國巴伐利亞州的奧格斯堡(Augsburg)正式創立,取名為“Keller und Knappich Augsburg”簡稱KUKA。而庫卡和工業機器人的淵源起始于1973 年,1973 年庫卡開始研發工業機器人。北京奔馳工廠大量應用KUKA C4 系列機器人,型號從KR16至KR500 等多種型號。
2 KUKA 機器人系統構成與軟件系統架構
2.1 KUKA 機器人系統組成
庫卡機器人主要有機械系統、控制系統、示教器、系統軟件及配套電纜等組成(圖1),其中機械系統為機器人本體部分,是機器人的支撐基礎和執行機構,包括基座、臂部、腕部;控制系統是機器人的大腦,是決定機器人功能和性能的主要因素,主要功能是根據作業指令程序以及從傳感器反饋回來的信號,從而控制機器人在工作空間中的位置運動、姿態和軌跡規劃、操作順序及動作時間等;示教器是用于機器人的手動操作、程序編寫、參數配置及監控的手持裝置。
機械手是機器人機械系統的主體,KUKA 機器人一般由6個活動的、相互連接在一起的關節(軸)組成(圖2)。1 軸到6 軸構成完整的運動鏈,6 個軸對應的標號分別為A1、A2、A3、A4、A5 和A6,其中A1~A3 軸為機器人的主軸,主要確定機器人末端在空間的位置,A4~A6 軸是機器人的腕部軸,主要確定機器人末端在空間的姿態。各軸的運動通過伺服電機有針對性的調控而實現。這些伺服電機通過減速機與機械手的各部件相連。

圖1 KUKA 機器人組成
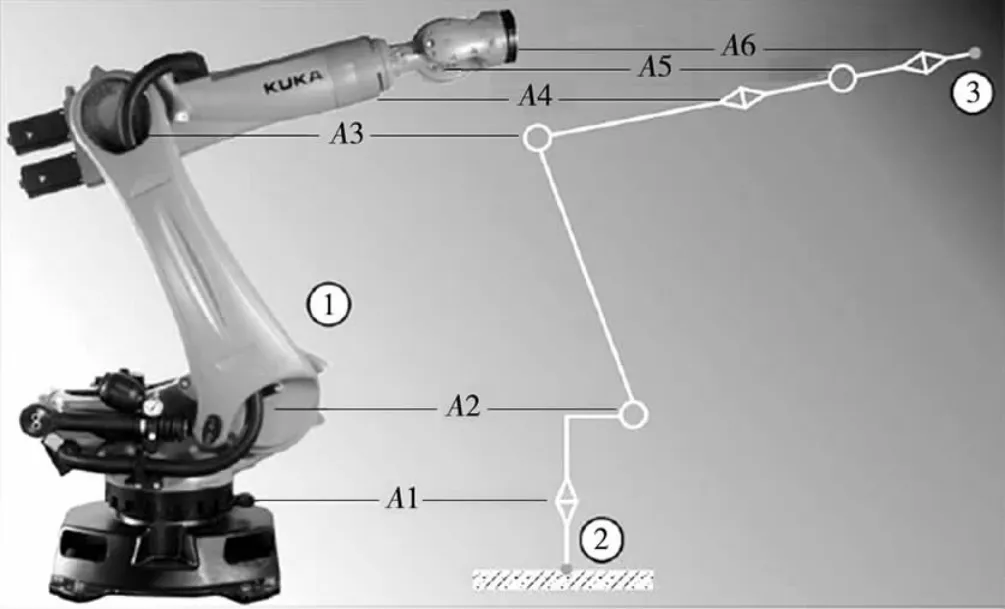
圖2 KUKA 機器軸組成
機器人足部即基座,為運動鏈的起點,是機器人的基礎部分,起支撐作用;法蘭盤即最后一個軸的機械接口,也是運動鏈的開放端,習慣上稱為末端執行器,可以安裝不同的機械操作裝置,如抓手、吸盤等。
2.2 KUKA 軟件系統架構
KUKA 機器人控制軟件運行于XP+VxWorks 平臺,既可以提供良好的人機交互界面,又能提供精確的實時控制。KUKA WrokVisual 軟件架構的模塊化結構把一個項目的所有步驟融合到同源的軟件環境中,它可以被同時用作工作單元配置的規劃工具和通用編程環境。從規劃到編程,再到優化,WorkVisual 通過為所有的工具匹配統一的外觀而簡化了所有的自動化任務。
KUKA 機器人系統軟件運行在WindowsXP 操作系統下,機器人控制器KPC 結構類似普通的PC 架構。在裝焊車間的工業環境下運行,機器人PC 軟件和硬盤都存在著系統報錯和硬盤損壞現象。一旦出現此類現象,需要重新更換硬盤并在線安裝控制系統和相關工藝包。系統恢復完成以后,還要進行機器人程序的恢復工作,大量占用生產時間,造成長時間的設備停機。
3 KUKA 機器人硬盤系統故障分析
機器人運行過程中出現Windows 系統錯誤,機器人程序丟失。系統錯誤如圖3 所示。針對此類故障首先進行系統重啟。
在重啟過程中還會出現控制電腦無法進入Windows 系統。機器人控制柜硬盤狀態顯示的第一個燈常亮。代表機器人PC無法讀取到硬盤數據。機器人PC 硬盤損壞,此時需要更換機器的硬盤、重新安裝系統和工藝包,造成設備長時間停機,嚴重影響車間產量輸出。這種在線維修方法已經遠遠不能滿足現場對設備快速恢復的實際要求。
4 KUKA 機器人系統備份方案
針對實現KUKA 機器人系統故障的快速恢復,采用多種方法進行保障。首先將機器人控制器上使用的機械硬盤更換成固態硬盤,提高硬盤的啟動速度與穩定性。減少由于硬盤自身質量問題造成的停機。
建立機器人系統安全體系與快速恢復流程(圖4)。第一步:針對主線和重點工位的機器人硬盤實現1 對1 備份。利用周末停產時間,將現場的硬盤從PC 上拆下,使用GHOST(系統鏡像)方式,制作新的鏡像硬盤,并將新的硬盤更換到現場使用,原來的舊硬盤作為備份硬盤使用。此類硬盤數在600 塊左右,當現場硬盤損壞的時候可以直接進行更換,停機時間控制在10 min。第二步:對現場所有的近1400 臺機機器人硬盤鏡像進行軟備份,將全部的鏡像存放在8 個8 T 移動硬盤中。且這些移動硬盤相互備份,避免出現移動硬盤損壞數據無法讀取現象。當現場的非重點工位或者備份硬盤出現故障時,可以直接從備份移動硬盤中讀取對應的機器人硬盤鏡像制作硬盤,直接更換到現場,采用此類方法可以將硬盤損壞故障的恢復時間控制在20 min。第三步:提前制作一定數量的純凈系統硬盤,在這些硬盤中安裝Windows 系統、基礎的工藝包以及相關的應用軟件。當備份硬盤和機器人鏡像軟備份全部失效的時候,可以直接安裝純鏡像硬盤,連接機器人服務器安裝相應的專屬工藝包如點焊、激光和涂膠等。恢復程序項目備份就可以完成故障的排除。采用此種方法可以將停機時間控制在30 min。有效保證機器人硬盤故障的快速恢復。
圖3 機器人系統錯誤

圖4 機器人系統安全體系與快速恢復流程
5 結語
北京奔馳MRA 裝焊維護團隊,已經完成機器人安全體系的建立。實現對機器硬盤的有效管理。避免由于機器人硬盤問題造成的設備大停機故障。保證車間的正常生產。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
