溫室生長信息和環境信息多傳感檢測系統設計
2021-01-07 15:43:17張曉東李鵬飛毛罕平高洪燕
江蘇農業科學 2021年24期
張曉東 李鵬飛 毛罕平 高洪燕



摘要:我國設施農業發展迅速,目前對作物長勢信息檢測主要依靠傳統判別方法,但是傳統長勢信息判斷存在主觀性強、費時費力等弊端,因此設計了適用于溫室高架栽培作物的軌道式移動檢測平臺,該平臺通過搭載作物生長和環境信息多傳感檢測裝置,可實現對高架植物的莖、果、葉長勢和冠層-空氣溫差等生長信息,以及環境溫濕度、光照強度等氣象環境因子進行監測。為了適應溫室行走環境,提高行走的穩定性,移動檢測平臺采用軌道式移動機構設計,即利用溫室加熱管道作為軌道,以確保機構的穩定行走,對平臺的運動功能進行驗證,絕對誤差最大值為 7.2 mm,相對誤差為0.72%。移動檢測平臺采用高舉升升降機構,結合5自由度機械臂系統將傳感器放到所需位置,將實際測量高度值與標準高度位置值進行數據對比分析,絕對誤差最大值為0.83 mm,相對誤差為0.78%,因此能精準地將所要使用到的傳感設備放到所需的高度和預定位姿。
關鍵詞:溫室作物;多傳感;信息采集;設施農業;生長與環境監測
中圖分類號:S127 文獻標志碼: A
文章編號:1002-1302(2021)24-0209-06
收稿日期:2021-04-13
基金項目:國家自然科學基金面上項目(編號:61771224);江蘇省高等學校自然科學研究重大項目(編號:18KJA416001);江蘇省現代農業裝備與技術協同創新中心 (編號:4091600029);江蘇省自然科學基金(編號:BK20180864);現代農業裝備與技術重點實驗室開放基金(編號:JNZ201903);中國博士后科學基金(編號:2017M621650);“十三五”國家重點研發計劃(編號:2018YFF0213601)。
作者簡介:張曉東(1970—),男,江蘇鎮江人,博士,副研究員,主要從事基于可見光-近紅外多維光信息的作物生長信息檢測方法研究。E-mail:zxd700227@ujs.edu.cn。
我國設施農業發展迅速,提高溫室作物的產量和品質是我國目前設施領域發展的關鍵問題。作物長勢和環境信息的獲取對溫室環境調控具有重要意義。傳統長勢信息的獲取主要依賴專家經驗,主觀性強;作物養分信息可以通過化學分析方法獲取,但費時費力,且難以實現基于作物信息反饋的水肥和環境優化調控。因此,研發適用于溫室環境的作物生長信息檢測系統,具有重要的研究意義和應用價值。
國內外學者對于作物生長信息檢測系統的研究領域較廣。其中Elvanidi等利用高光譜機器視覺系統作為非接觸技術來檢測無土番茄作物中的氮素缺乏[1]。Ochoa等利用機器視覺和遙感衛星圖像,對大田作物進行了實時的監測和生長狀況的獲取[2]。Bai等在溫室環境信息的檢測中針對無線傳感網絡的數據融合問題提出了分布式估計方案,提高了溫室環境信息檢測的準確性[3]。Ehret等通過神經網絡對自動檢測的溫室番茄的產量、生長狀況和用水進行分析,模型很好地預測了產量和生長需求,表明自動預測相關信息能夠便于溫室進行自動化管理[4]。Mangus等開發了高時空分辨率的作物水分脅迫監測系統,利用熱紅外成像技術并使用紅外熱像系統(thermal infrared imaging system,簡稱TIRIS)遠程測量冠層溫度得出作物缺水指數(crop water stress index,簡稱CWSI) 方法可以替代灌溉調度方法,為溫室灌溉和管理提供了決策[5]。劉茂成用光電傳感器設計了一個手持式的葉片氮素診斷系統,但其還未驗證不同品種、不同生育期、不同氮處理的植物[6]。程坤設計的葉綠素含量檢測系統在不損傷葉片的前提下實現葉綠素含量檢測以及葉片所處環境溫濕度的實時檢測[7]。劉青結合無線傳感器技術和聲發射技術,實現了對溫室土壤溫濕度、空氣溫濕度、二氧化碳濃度、光照度及反映病害狀況的聲發射信號的采集,該系統提高了溫室自動化和智能化水平并具有很好的移植性[8]。Liang等針對溫室檢測系統接線復雜且容易老化的問題提出了一種基于無線保真(WIFI)的溫室環境動態檢測系統,實現了遠程檢測,為溫室中自動檢測提供了寶貴經驗[9]。
綜上所述,現有的設施作物生長的非接觸監測技術大多為分布式的系統,且多基于光電、視覺和紅外等單一傳感新型系統,難以全面監測作物營養長勢和溫濕度、光照等環境信息,且缺少先進適用的溫室檢測平臺,難以適應溫室非結構環境下的巡航檢測。本研究的設計在現有移動平臺的基礎上,基于美國國家儀器有限公司(NI)的LabVIEW平臺,結合多傳感技術設計出一種用于作物生長信息和環境信息檢測的檢測系統,以期實現對作物生長和環境信息的獲取和巡航監測。
1 硬件功能設計
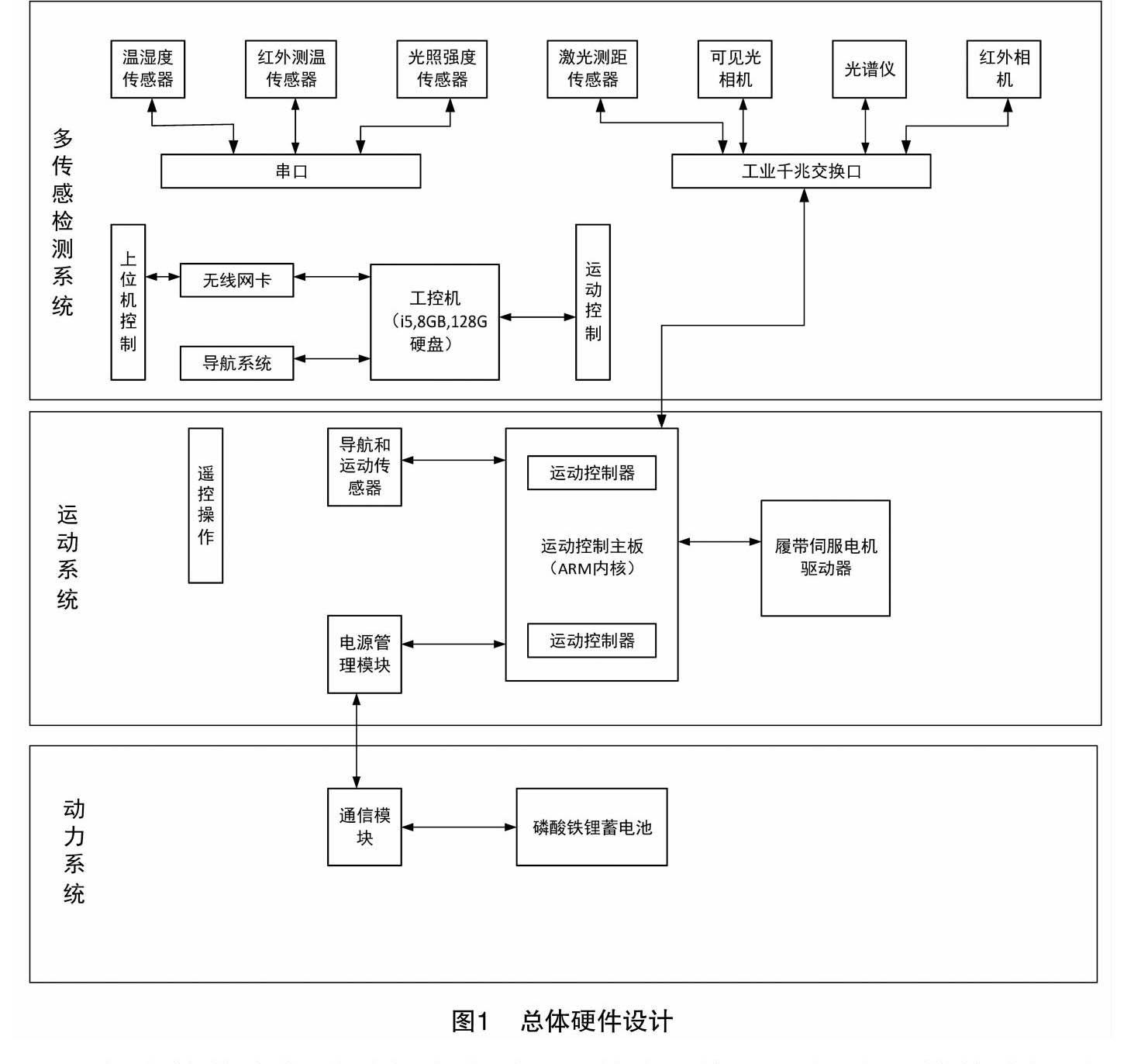
如圖1所示,本研究設計的檢測系統主要由運動系統、多傳感器檢測系統、控制系統、動力系統和導航系統組成。其中,運動系統包括用于系統行走的軌道式的移動底盤和控制底盤運動的無刷減速電機;多傳感檢測系統包括獲取作物形態特征的可見光相機,獲取冠層溫度的紅外傳感器,檢測環境溫濕度的環境光照和溫濕度傳感器,檢測作物高度信息的激光測距傳感器以及用于完成檢測并搭載多傳感器的機械臂和末端云臺;控制系統包括工控機和運動控制器;動力系統包括48 V鋰電池組和充電模組;導航系統通過磁導航地標傳感探測,通過電磁導航的方式控制移動平臺的順序到達檢測位。該檢測系統集成了自動導引車(AGV)控制、機械臂操控、圖像采集、環境信息采集、熱成像系統、光譜信息采集等功能,能夠滿足溫室環境中的作物營養、水分、長勢信息和環境信息的移動式數據采集和信息貯存,同時結合上位機信息分析系統可實現溫室作物生長和環境信息獲取(圖2、圖3)。
該系統利用溫室加熱管作為軌道進行自主移動檢測巡航作業,利用機械臂搭載的多傳感檢測系統獲取作物的長勢綜合信息。通過獲取作物冠層的熱紅外溫度結合環境溫度信息,獲取作物的冠層-空氣溫特征,并進一步提取水分脅迫信息;基于可見光相機獲取作物的多視場圖像結合激光測距可得到作物的冠幅、株高、莖粗等形態特征[10-11]。結合環境溫濕度、光照等傳感探測可以實現對環境綜合信息的獲取,從而實現對作物生長和環境信息的綜合評價。
2 移動平臺結構設計
2.1 平臺結構設計
系統搭載的多傳感器為了適應不同株高和不同視場的信息采集,須要通過舉升機構的升降和機械臂的水平移動改變多傳感器的位姿,這會大幅改變移動平臺的重心,故須避免作業平臺傾覆的風險。為了保證巡航精度,確保駐點巡航探測信號的穩定性和定位精度,需要車體具有較好的適應性和穩定性,避免行走過程因軌道不平和重心大幅變化導致的平臺整體顛簸,以滿足作物生長和環境信息檢測設備對平臺巡航精度及平穩性的要求。因此,在設計移動平臺結構時,為了降低重心,提高平臺的穩定性,在零部件的布局上,將伺服電機、驅動器、蓄電池等較重的零部件布置在車體最下層,而將運動控制器、信號采集裝置等輕型部件安裝車體在上層;在材料的選取上,小車底盤采用了實心結構的鋼材,而舉升機構和機械臂則采用了高強度的鋁材進行加工制造,以降低重心,提高系統高舉作業的穩定性和載荷。同時為了保證續航要求,系統采用大容量鋰電池,以保證長時間的自主巡航作業。
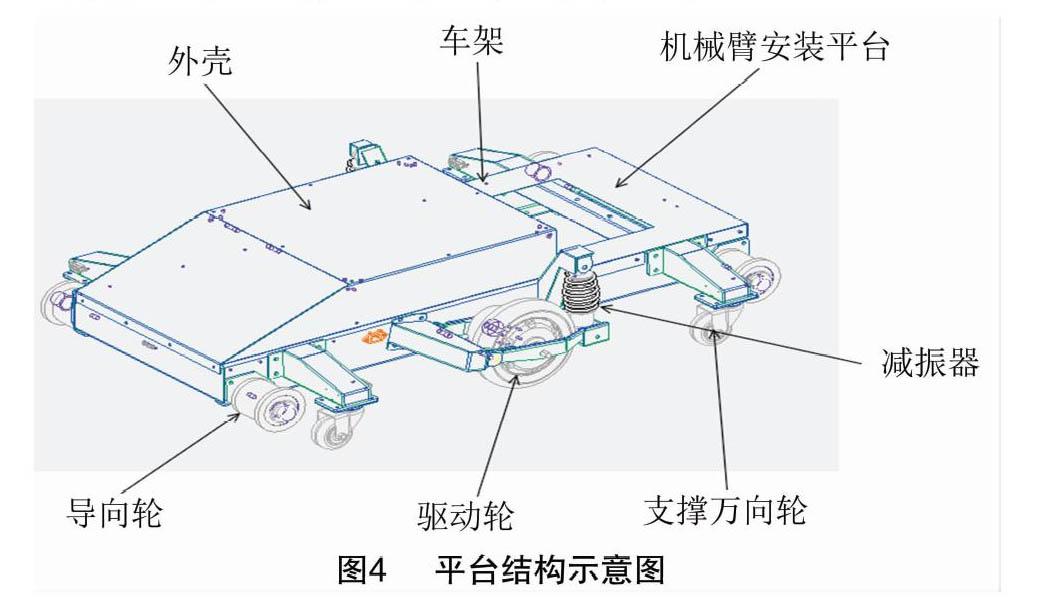
在設計小車底盤結構時,為了保持車身緊湊同時確保底盤的穩定性,車體長度設計為 1 100 mm,底盤寬度設計為750 mm。為保證巡航的精度和穩定性,采用軌道式的底盤結構,以溫室加熱管道作為軌道,底盤采用驅動輪、導向輪和支撐萬向輪等3組輪系結構,其中導向輪的作用是支撐車體并保證車體沿軌道行進,導向輪表面采用菱形網格微結構,以保證具有一定的摩擦導向力,外緣采用凸起結構以便小車在產生極限偏離時能夠適應軌道自動糾偏,確保不會脫軌。移動平臺中部的驅動輪的作用是行進的驅動控制,采用橡膠輪式結構,為了提高車體的穩定性,過濾地面震動,導向輪和驅動輪上均安裝有避震彈簧,以提高行走的穩定性。支撐萬向輪的作用是在非軌道的溫室鋪裝路面行走時,作為平臺行走的輔助支撐(圖4)。
2.2 機械臂系統的結構設計
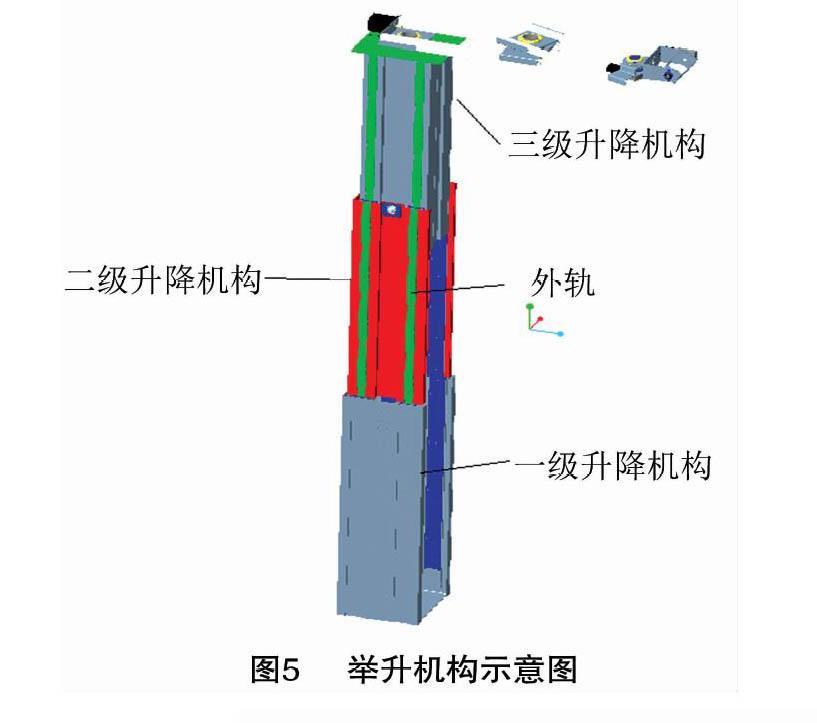
為了適應不同株型,尤其是番茄、黃瓜等大株型和連續生長型作物的檢測需求,機械臂系統采用了三級舉升機構(圖5),末端傳感器的最高舉升高度可達2.80 m。一級升降機構固定在底座框架上,二級升降機構與三級升降機構利用內置軌道與各升降機構內側的凹槽鑲嵌,并由同步帶牽引,采用具有伺服反饋的電動推桿進行舉升,完成三級機構的順序舉升,以實現對行程的精確控制。
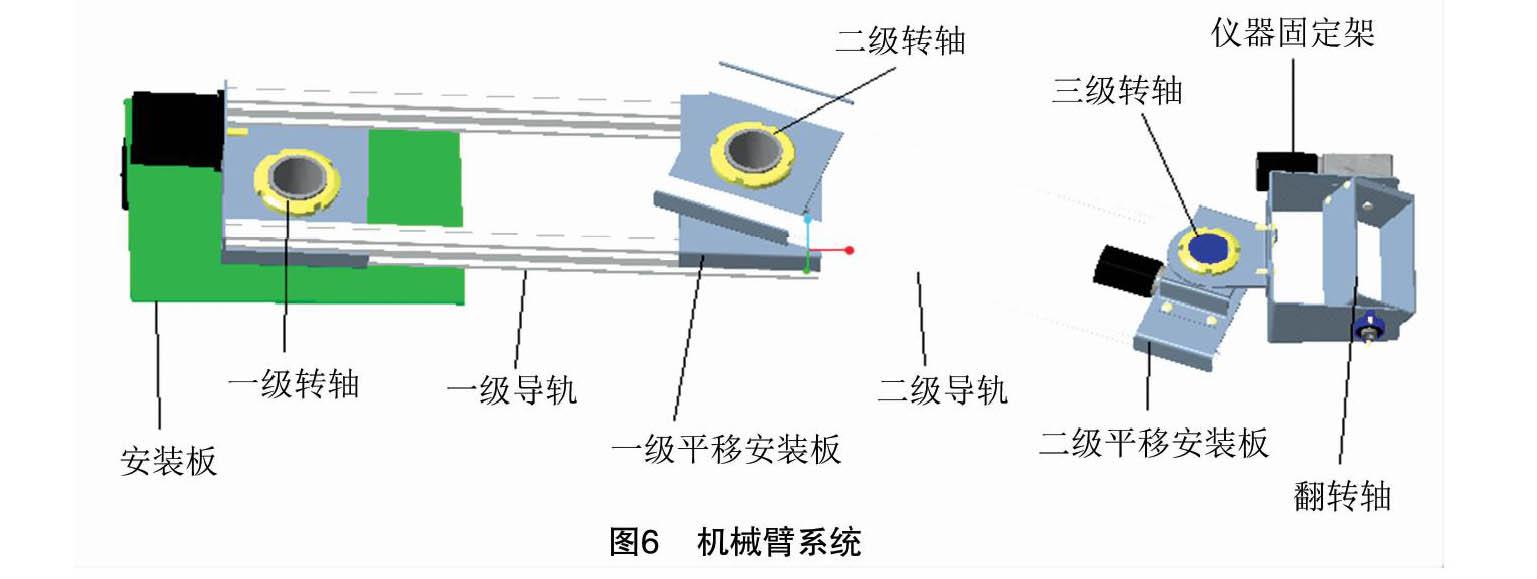
為獲取不同生長期、不同高度植株的主視和俯視方向的長勢和營養信息,舉升機構不僅要能夠大幅升降,同時還須要配合多自由度的機械臂、末端云臺機構,實現多傳感器的高度、視場和位姿的調節。如圖6所示,機械臂和云臺機構采用兩節機械臂,結合三級轉軸構成水平回轉臂,單節機械臂為500 mm,三節回轉臂結合云臺機構可以完成水平方向200~1 000 mm的不同伸展和回轉半徑范圍的傳感器的視場和位姿調節。末端云臺機構用來固定多傳感檢測系統,結合翻轉軸可以實現垂直方向 -90°~90°視角的傳感器位姿調節。水平旋轉軸采
用具有位置反饋伺服電機完成驅動控制,垂直翻轉軸采用帶有位置反饋的小型步進電機完成。系統探測時,基于期望的空間位姿坐標,通過多軸配合結合運動路徑軌跡的組合規劃,實現對多傳感探測器的物距、視場等位姿的精準控制。
2.3 控制系統設計
2.3.1 控制系統設計
控制系統由動力系統、運動控制系統和信息采集系統組成。控制系統硬件以PC工控主機作為上位機及2套STM32F407嵌入式主板作為下位機系統,上下位機采用485總線通訊,實現檢測平臺的行走和機械臂的運動控制,以及多傳感信息的采集。
軌道式多傳感檢測平臺的動力系統采用 48 V/60 Ah 的鋰電池為整個移動平臺提供動力,1次充電可以滿足整個移動平臺的12 h續航能力。
運動控制系統采用STM32F407嵌入式主板實現平臺的運動控制,移動平臺使用2個步進電機分別驅動移動平臺的左、右驅動輪。其中,每個電機的轉向、轉速、啟動、停止由運動控制器控制。運動控制系統下位通過接收上位機發送的指令和控制輸出,驅動電機驅動器控制移動平臺中牽引電機的旋轉。移動平臺的轉向則由差速實現。移動平臺的前后導向輪是從動輪,起到導向和支撐小車沿軌道運動的作用。萬向支撐輪在移動平臺是平臺的路面支撐,即作為鋪裝路面行走和進行整體搬運時的車體支撐[12-13]。
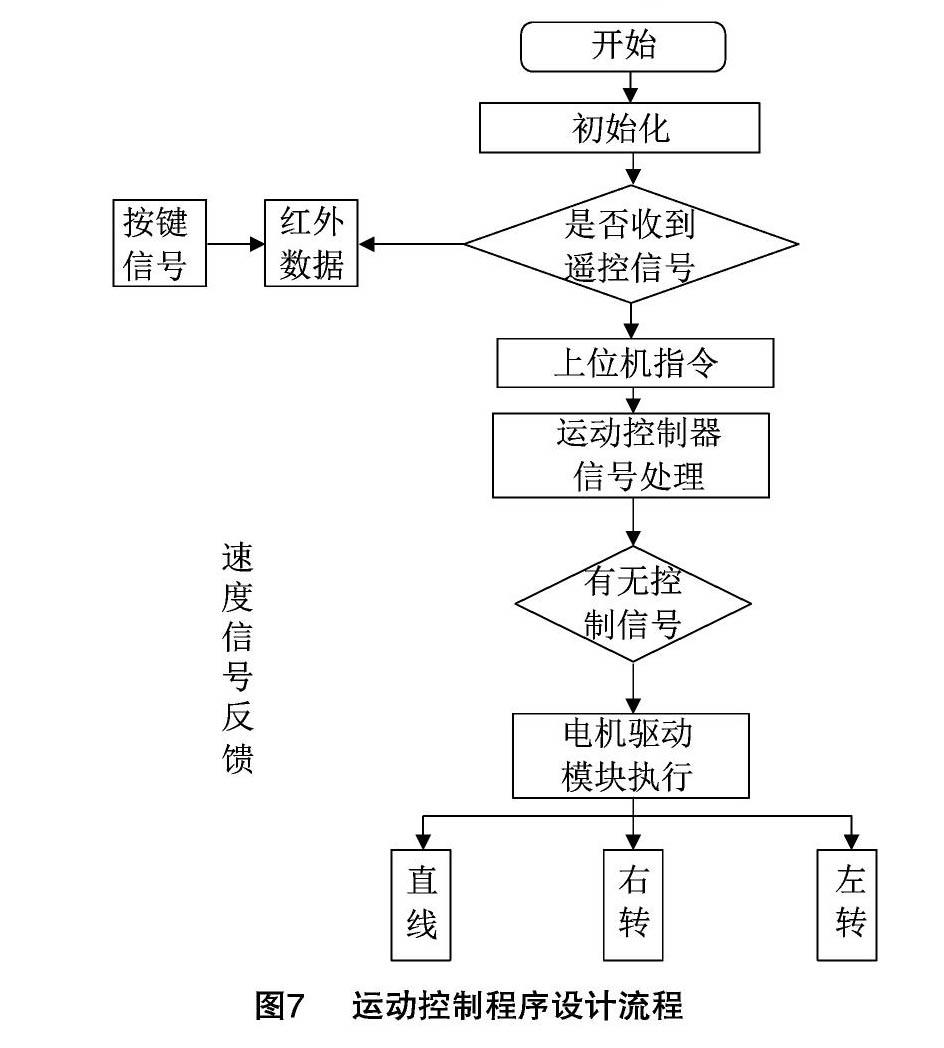
運動控制器作為移動平臺和機械臂系統的運動的中樞,能根據遙控或者上位機的指令,完成平臺的前進、后退、左轉、右轉等基本運動,以及機械臂系統的升降、旋轉和位姿控制。本研究以平臺移動控制為例說明控制流程。電機驅動的控制流程如圖7所示。
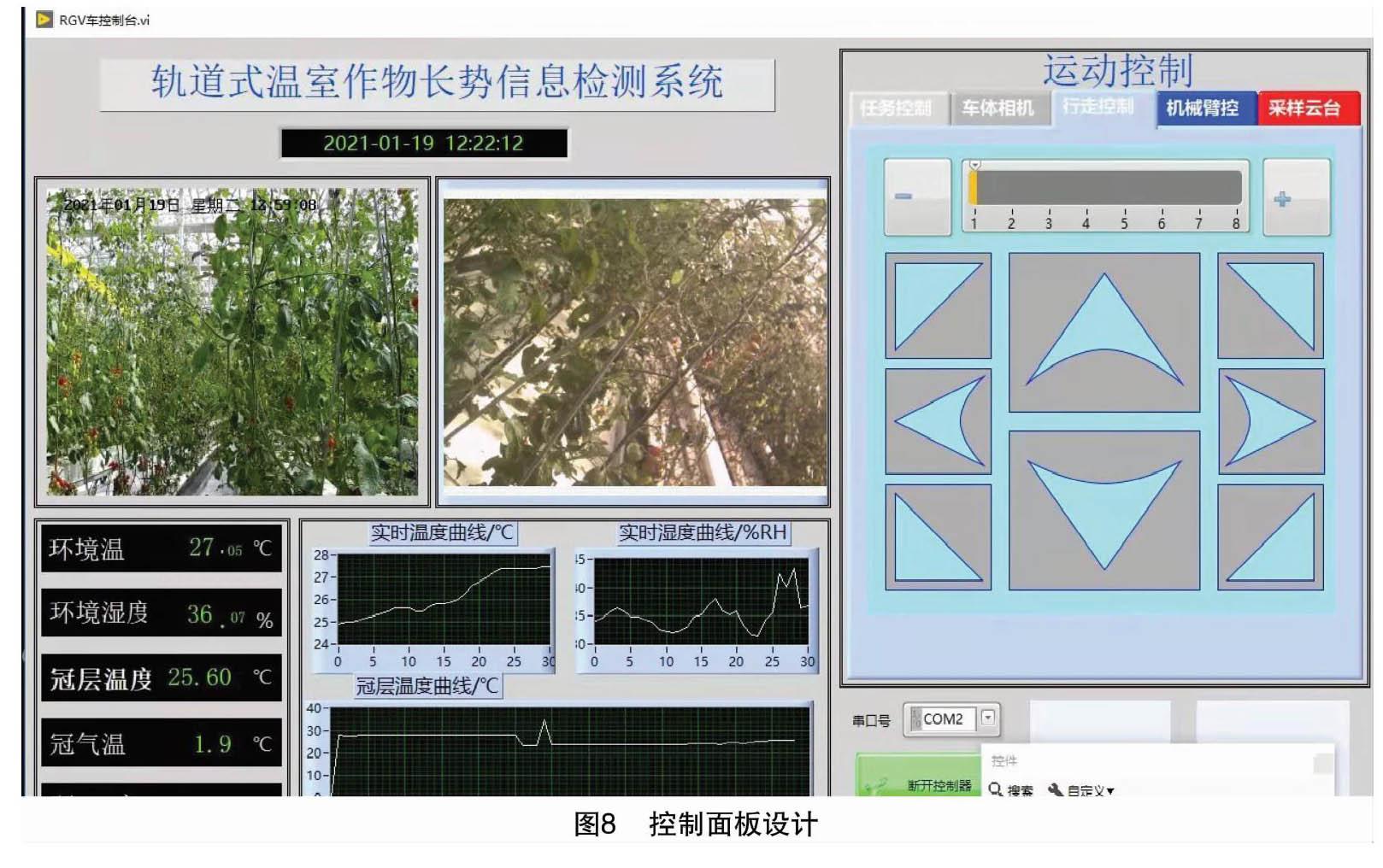
啟動控制系統之后首先對整個系統進行自檢與初始化,判斷各電機與驅動器是否通訊正常、各傳感器數據是否正常輸出、工控機與運動控制器是否通訊正常。自檢完成之后,通過上位機對傳感器及控制器進行控制參數的初始化設置,包括對增量編碼器原點設置,軌道式底盤各電機控制參數、初始運行速度等參數設置。當系統檢測未發生任何異常報警并完成初始化,則進行復位并等待接收上位機的運動控制指令或遙控指令,當系統有任何警告或錯誤信號時,則移動平臺停車報警,并等待人工處理。底層的運動控制器是基于用戶定義事件的配置文件來安排順序,協調并進行相對應的運動規劃并決定合適的扭矩命令,然后將其發送至電機放大器,產生運動,所有控制代碼均在ARM開發板上完成,并通過RS-485接口與上位機連接,在上位機的LabVIEW軟件中通過VISA控件對串口波特率、奇偶校驗、數據位、停止位等參數進行配置,數據通訊協議符合Modbus協議規范,從而在LabVIEW的前面板(圖8)中完成交互操作。
2.3.2 多傳感檢測系統
多傳感檢測系統由工控機進行控制。工控機通過485總線采用Modbus協議解析獲取溫度、濕度、光照等傳感器數據,采用千兆路由器網絡端口獲取視覺傳感器、激光測距和光纖傳感器的光譜信息。
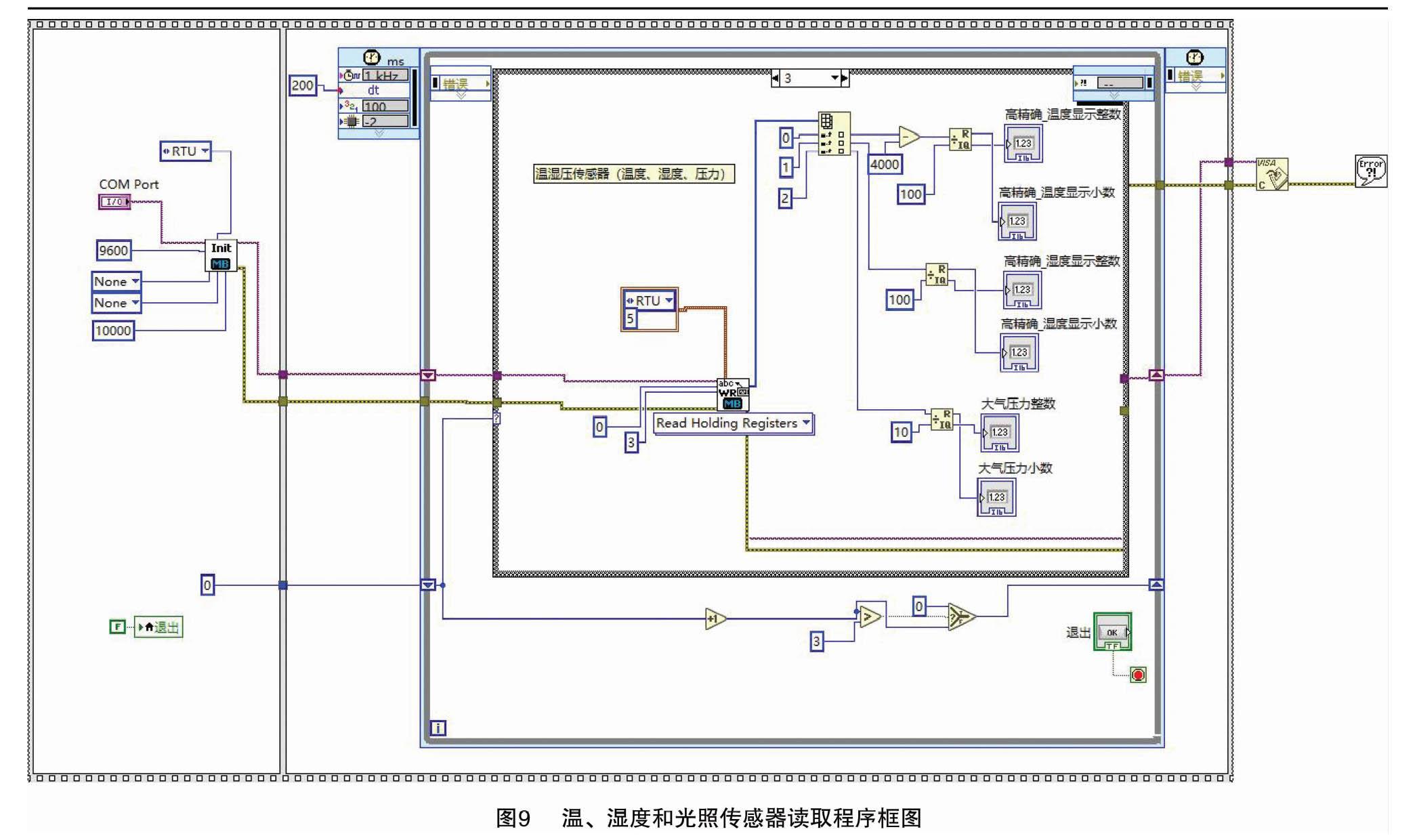
多傳感器的采集與處理系統利用LabVIEW界面編輯功能以及能夠調用Windows32動態連接庫的特性,并針對LabVIEW調用DLL的特點和傳感器控制的復雜性,確定可見光相機、紅外熱成像、光譜儀和溫濕壓三合一傳感器可調用的功能函數,每個可調用函數都對應著某一具體的功能任務,包括初始化函數、運行條件初始化函數、運行狀態函數、脈沖發送函數、軸伸長計算函數、停止運行函數、歸零函數、結束運行函數等。整個LabVIEW傳感器部分的框圖程序結構采用循環結構和順序結構(sequence structure)堆疊而成,每一順序框都對應某項固定的任務,都包含在整個固定頻率的循環結構當中[14]。溫度、濕度、光照信息讀取程序框包括初始化事件和運行過程事件,如圖9所示。
2.3.3 交互界面的設計
本研究設計的系統通過LabVIEW創建人機交互界面,實現溫室作物和環境多傳感信息的采集和運動控制過程的控制界面設計。如圖8所示,生長信息和環境信息的交互界面布置在視圖左側,便于直觀讀取,運動控制的人機交互操作界面放在視圖右側,便于控制操作。信息采集界面包括圖像信息的顯示控件、波形顯示控件。運動控制操作界面主要有移動平臺、機械臂及云臺的運動控制,同時包括執行腳本文件的輸入模塊,以便整個檢測系統在固定工況下的自動運行。
3 平臺試驗
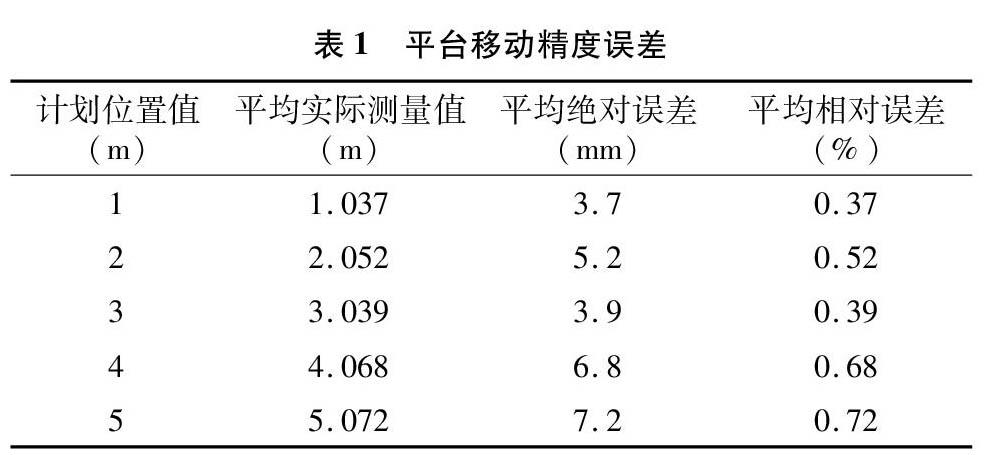
本研究對軌道式移動檢測平臺的運動功能進行了驗證,試驗地點在江蘇大學現代農業裝備與技術重點實驗室Venlo型溫室內。首先,對移動平臺的運動精度進行驗證,在軌道方向上間隔1 m等間距選擇5個平移試驗點,每個點進行5次測量再取平均值,并將其算作實際的測量位置值,將實際位置值與標準位置值進行數據對比分析。如表1所示,絕對誤差的最大值為7.2 mm,相對誤差最大值為0.72%。該數據表明,在存在自然誤差的情況下,測量裝置移動的精度較高,對實際測量的影響可以忽略。
取5個升降機構的試驗點,起始點為800 mm,之后取等間距500 mm為測試點,同理每個點進行5次測量并平均,將測量出來的實際測量高度位置值與標準的高度位置值進行數據對比分析,得到相關數據如表2所示。實際測量的高度位置與標準高度位置的絕對誤差最大值為8.3 mm,相對誤差最大值為0.78%。考慮到摩擦和自然誤差等,可以認為在高度方面的誤差帶來的影響可以忽略。
4 結論
本研究設計了一種適用于溫室基于軌道式平臺的溫室綜合信息移動檢測平臺,為了提高系統行走的穩定性,采用溫室的加熱管道作為行走軌道,采用低重心設計開發了車體結構。為了實現對不同生長期作物的監測,采用了三級舉升機構結合機械臂系統,完成不同作物和生長期的作物信息的獲取。該平臺可搭載作物生長和環境信息多傳感檢測裝置,實現對高架植物的莖、果、葉長勢和冠-氣溫差等生長信息,以及環境溫濕度、光照強度等氣象環境因子的監測。平臺移動絕對誤差的最大值為7.2 mm,相對誤差最大值為0.72%;平臺升降的絕對誤差最大值為8.3 mm,相對誤差最大值為0.78%,具有較高的運動控制精度。
參考文獻:
[1]Elvanidi A,Katsoulas N,Ferentinos K P,et al. Hyperspectral machine vision as a tool for water stress severity assessment in soilless tomato crop[J]. Biosystems Engineering,2018,165:25-35.
[2]Ochoa K S,Guo Z F. A framework for the management of agricultural resources with automated aerial imagery detection[J]. Computers and Electronics in Agriculture,2019,162:53-69.
[3]Bai X Z,Wang Z D,Zou L,et al. Collaborative fusion estimation over wireless sensor networks for monitoring CO2,concentration in a greenhouse[J]. Information Fusion,2018,42:119-126.
[4]Ehret D L,Hill B D,Helmer T,et al. Neural network modeling of greenhouse tomato yield,growth and water use from automated crop monitoringdata[J].ComputersandElectronicsinAgriculture,2011,79(1):82-89.
[5]Mangus D L,Sharda A,Zhang N Q. Development and evaluation of thermal infrared imaging system for high spatial and temporal resolution crop water stress monitoring of corn within a greenhouse[J]. Computers and Electronics in Agriculture,2016,121:149-159.
[6]劉茂成. 植物葉片氮營養手持診斷儀的設計與研發[D]. 長春:吉林農業大學,2017:35-36.
[7]程 坤.基于STM32的葉綠素含量光電檢測儀設計[J]. 電子技術與軟件工程,2014(20):143-145.
[8]劉 青. 基于WSN的溫室無線監測系統研究[D]. 天津:天津科技大學,2018:42-44.
[9]Liang M H,He Y F,Chen L J,et al. Greenhouse Environment dynamic Monitoring system based on WIFI[J]. IFAC-Papers OnLine,2018,51(17):736-740.
[10]Croft H,Chen J M,Zhang Y. The applicability of empirical vegetation indices for determining leaf chlorophyll content over different leaf and canopy structures[J]. Ecological Complexity,2014,17:119-130.
[11]闕玲麗. 基于計算機視覺技術的玉米植株高度檢測的研究[J]. 農機化研究,2017,39(12):219-223.
[12]杭 騰,毛罕平,張曉東,等. 基于機器視覺的番茄長勢信息無損檢測的研究[J]. 農機化研究,2015,37(11):192-197.
[13]張鐵民,黃 翰,黃鵬煥. 電動輪式移動小車控制系統設計與試驗[J]. 農業工程學報,2014,30(19):11-18.
[14]孫意凡,孫建桐,趙 然,等. 果實采摘機器人設計與導航系統性能分析[J]. 農業機械學報,2019,50(增刊1):8-14.
[15]王 康,梁秀英,周風燃,等. 基于磁導引的履帶式小車作物圖像自動采集系統設計與試驗[J]. 華中農業大學學報,2020,39(2):141-149.
