基于增益控制電路的響應不一致性校正方法
2021-01-09 06:49:54李海廷李少波周國家付培志
激光技術 2021年1期
李海廷,胡 鑫,曾 雙,李少波,周國家,隋 峻,魯 強,付培志
(西南技術物理研究所, 成都 610041)
引 言
半主動激光制導武器由于具有制導精度高、抗干擾能力強、結構簡單、成本低、通用性強等優勢,一直在局部戰爭中占據重要地位,從20 世紀60 年代開始就得到了廣泛的應用。現役裝備中半主動激光制導武器的典型代表為[1]:美國的Paveway和俄羅斯的KAB-1500L激光制導炸彈;美國Hellfire、AGM-65E、法國AS-30L和俄羅斯X-25ML激光制導導彈;美國銅斑蛇、俄羅斯紅土地、以色列火球等激光制導炮彈;以及美國BAE公司的AKPWS-Ⅱ[2]和洛克希德馬丁公司的DAGR激光制導火箭彈等。
由半主動激光制導技術的原理可知,在激光制導導引頭信息處理電路中,具有4個相互獨立的數據采集通道,而由于通路上分立器件(電阻、電容、電感和放大器)的精度誤差,以及數模轉換過程中對模擬信號的量化誤差,會導致4個采集通道的對相同輸入信號的響應度不一致。該不一致性會致使導引頭輸出的俯仰、偏航兩個方向的目標指向都存在一個偏移量,從而降低激光制導導彈(或者炸彈)的打擊精度。傳統的不一致性校正方法是在信息處理器中,對4個采集通道采用系數修正的方式進行校正。國外文獻中未看到相關技術的論述,而國內僅參考文獻[3]中論述了通路不一致性的校正方法,但是該方案中尚存在一些不足之處,在實際應用中較難實現。
本文中針對上述工程應用中對4個采集通道響應不一致性校正的實際需求進行了深入研究和探索,重點研究了信息處理處理電路中的增益控制電路,分析了其設計要點,并給出了一種增益控制電路的設計原理圖,提出了一種基于該增益控制電路的通道間響應度不一致性的校正方法。該方法針對導彈(或者炸彈)實際飛行過程中的各個離散增益點,進行不一致性校正。經過線性區測試和半實物仿真驗證,采用該方法校正后可明顯提高制導精度。
1 半主動激光制導武器工作原理和系統組成
半主動激光制導武器系統由激光照射器和激光制導導彈或者炸彈組成,激光照射器獨立于導彈之外,可由單兵地面手持照射目標,也可由機載照射吊艙由空中照射目標。在激光制導武器搜索、跟蹤目標的過程中,接收激光照射器照射到目標上的漫反射回波,經光學系統會聚在四象限激光探測器光敏面上,形成光斑,通過計算四象限探測器上光斑重心的位置,得到光軸在俯仰、偏航兩個方向上與目標的夾角,并發送給綜合控制器,形成制導回路[4]。半主動激光制導武器系統的工作原理如圖1所示。

Fig.1 Schematic diagram of semi-active laser guided weapon system
平臺式激光導引頭主要由光學系統、四象限激光探測器、激光信息處理板、綜合控制器和二次電源模塊組成,如圖2所示。

Fig.2 Block diagram of platform laser seeker
2 影響制導精度的主要因素分析
在激光制導導彈(或者炸彈)中,激光信息處理器的原理框圖如圖3所示。以現場可編程門陣列(field-programmable gate array,FPGA)為核心處理器,為激光探測器提供控制信號,并將其輸出的4路單端模擬信號經高通濾波和電壓驅動后,送入可變增益放大器(variable gain amplifier,VGA)進行放大,再由模數轉換器采樣并送入FPGA,最終將處理結果通過RS422輸出。
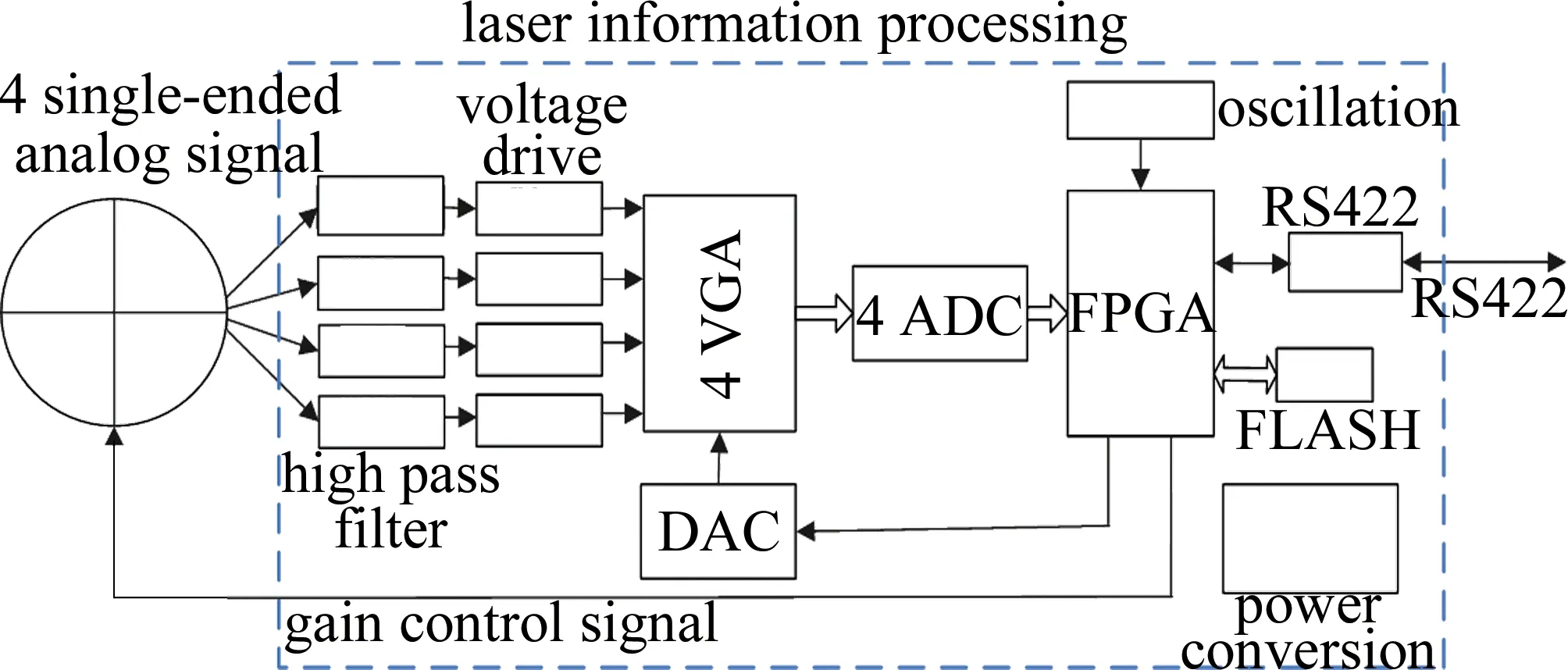
Fig.3 Schematic diagram of laser information processor
按照激光信號的傳輸路徑和處理流程,可將影響激光制導尋的器測角精度的因素分為外部環境因素和系統內部因素[3]。其中外部環境因素主要為大氣湍流引起測角誤差[5-6]。系統內部因素主要包括探測器安裝誤差、探測器性能引起的誤差以及激光信號處理電路導致的誤差[3]。這些誤差會導致導引頭的線性度變差,從而降低激光導引頭的制導精度和打擊目標時的命中精度。下面主要討論激光信息處理電路引起的制導誤差。
假設UA,UB,UC,UD分別為入射光斑在激光探測器A,B,C,D4個象限產生的光電壓,由激光制導的基本原理可知,如果4個通道對漫反射激光的響應度是完全一致的,則導引頭在俯仰和偏航方向相對光軸的偏差可由以下公式計算得到[4]:

(1)

(2)
信息處理電路中導致采集通道響應存在差異的主要原因包括:(1)模擬信號調理通道,包括放大器和濾波器等環節中分立器件(放大器、電阻、電容和電感等)的誤差造成的響應不一致性;(2)數模轉換過程中對模擬信號的量化過程中導致的不一致性。
以上兩個環節產生的響應不一致性,會導致4個采集通道對相同特性輸入信號的響應度產生差異,從而致使根據(1)式、(2)式計算出來的光軸在俯仰、偏航兩個方向上與目標的夾角存在一個固定的偏移量,最終降低激光制導導彈(或者炸彈)的打擊精度。按照傳統的不一致性校正方法,在信息處理器中,對4個采集通道采用系數修正的方式進行校正。假設以A路為基準,這時計算兩個方向偏差的公式就變為:
Δx=

(3)
Δy=

(4)
式中,kB,kC和kD分別是B,C,D3個通道的校正系數。
然而,(3)式和(4)式為理論計算方法,由于激光信息處理電路中,在導彈(或者炸彈)飛行過程中,需要根據接收激光能量的強弱,通過VGA電路動態調整放大電路的增益,而在不同增益點,4個信號通道的響應也存在差異。圖4為未經過校正的4個采集通道在不同增益點的響應不一致性曲線。從圖中可以看出,在不同增益點,4個通道的響應存在明顯差異,所以要在全接收能量范圍都保持4個采集通道具有較好的響應一致性,就需要對不同增益點分別計算一組校正系數,而對于采用FPGA作為處理器的系統,(3)式和(4)式中的小數乘法運算不僅耗費邏輯資源,還會增加處理延時,所以在真正的工程實踐中很難實現。

Fig.4 Response inconsistency curves for four channels at different VGA gain points
經過驗證,在FPGA程序中每增加一個16位定點乘法器,綜合后,占用的邏輯資源增加0.1%,功耗增加約0.04%,而增加的處理延時約為200ns(假設輸入時鐘頻率為150MHz),所以如果在每個離散增益點都采用傳統的系數校正方法進行校正,產生的邏輯資源、功耗和處理延時的開銷對系統應用極為不利。
3 半主動激光制導技術中增益控制電路的研究
本文中研究的不一致性校正方法是基于接收電路中的自動增益控制電路,所以首先討論自動增益控制電路的原理及其設計要點。在半主動激光制導武器中采用的四象限激光探測器,其動態范圍有限(一般是設置兩級衰減,動態總共為50dB~125dB),而在導彈(或者炸彈)從發射到命中目標的整個飛行過程中,接收到的激光能量的動態范圍遠遠超過探測器的動態范圍,所以必須在信息處理電路中增加可變增益放大電路,根據接收到的激光回波強弱,動態調整放大倍數,以使得信號幅度始終處于最佳采集范圍,從而保證在導彈飛行過程中,可以在接收到的全信號幅度范圍內實現高精度制導。
在設計自動增益放大電路時需重點考慮以下幾個因素:(1)輸入信號幅度范圍;(2)系統需要的動態范圍。
本文中設計的自動增益控制電路,輸入模擬信號幅度范圍為0V~5V,系統所需的自動增益控制電路的動態范圍不小于40dB。本文中研究的不一致性校正方法,對增益控制電路有特殊的要求,即在設計VGA電路時必須采用單通道VGA芯片,以避免雙路和4路VGA芯片片內通道間存在的增益不一致性對校正結果的影響。模擬調理電路和VGA電路的原理圖如圖5所示。在本方案中,差分驅動放大器采用ADI公司的ADA4937,VGA芯片采用ADI公司的AD8330,數字模擬轉換器(digital-to-analog converter,DAC)芯片采用ADI公司的AD5324。四象限激光探測器輸出的4路單端模擬信號經高通濾波后,由ADA4937構成的差分驅動電路轉換成差分信號后,送入由AD8330構成的VGA電路進行放大,使信號幅度始終處于模擬數字轉換器(analog-to-digital converter,ADC)的最佳采集范圍。DAC芯片AD5324用于調節VGA的增益。

Fig.5 Schematic design of gain control circuit
為了研究基于增益放大電路的不一致性校正方法,本方案中選用的VGA芯片AD8330屬于單通道模擬控制VGA,即由輸入到其增益控制管腳VDBS的模擬電壓來調節VGA的增益,VGA增益與輸入的模擬控制電壓是線性關系,當輸入到VDBS管腳的電壓為(0~1.5)V 時,對應的VGA電路的增益調節范圍為(0~50)dB,即調整率為30mV/dB, 輸入增益控制電壓與VGA增益的關系曲線如圖6所示。
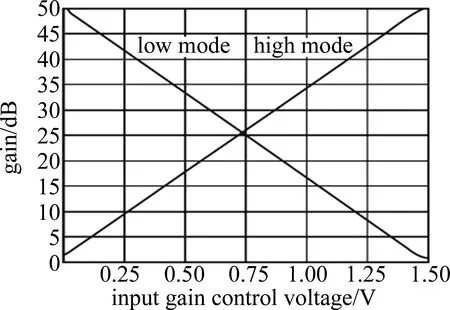
Fig.6 Input gain control voltage vs. VGA gain
為了適應本文中提出的基于增益控制電路的不一致性校正方法,并考慮到信息處理板的體積、功耗以及成本等因素,本方案中采用四輸出通道的12bit DAC(ADI公司的AD5324)實現VGA的增益調節,該芯片的數據和控制信號輸入采用串行外設接口(serial peripheral interface,SPI)接口,其獨立的4路輸出電壓,分別用于調整4路VGA的增益。在實際使用中,通過FPGA設置送往DAC的12bit數據,改變DAC輸出的4路模擬電壓值,從而達到調節VGA增益的目的。
4 基于自動增益控制電路的通道響應不一致性校正方法
有些文獻中提出了4個通道不一致性校正方法[3],但是都是采用基于傳統的系數修正的方式,而且沒有討論通道不一致性和VGA增益的關系。在實際應用中,在導彈(或者炸彈)飛行的過程中,根據接收到激光能量的強弱,動態調整VGA增益,但是調節的過程中并不需要連續調節VGA電路增益,而是使用有限的固定增益點,例如3倍、5倍、9倍和12倍等等,如果針對這些固定增益點進行不一致性校正,即可滿足系統對制導精度的要求。
本文中提出的不一致性校正方法的思路是基于第3節中的增益控制電路,針對在導彈(或者炸彈)從發射到命中目標的整個飛行過程中設置的各個離散增益點,給信息處理電路的4個采集通道輸入4路參量完全相同的正弦波(固定頻率為5MHz,根據VGA增益的大小設置相應的幅度),根據要達到的響應一致性范圍,動態調整VGA的增益,達到一致性校正的目的。
需要設計專門的VGA增益一致性校正、測試軟件,通過信號發生器給激光信息處理板輸入4路相同的單端模擬信號,測試軟件給FPGA寄存器下發VGA增益配置指令,設定需要測試的增益值,然后下發峰值檢測指令,獲取輸出的4路ADC通道采集到的峰值,然后對比4個通道峰值,以峰值最小的一個通道作為基準,根據要達到的一致性范圍,微調用于調整VGA增益的DAC的數據。校正軟件的校正流程如圖7所示。

Fig.7 Calibration software calibration process
校正過程中,通過校正軟件將滿足增益一致性要求的用于調節VGA的4路DAC數據存儲在FLASH(一種非易失性內存)特定的存儲單元中,在實際應用中,根據系統選定的特定增益點,從相應存儲地址對應的FLASH存儲單元中讀取對應的用于產生DAC的4路輸出電壓的12bit數據,實時地利用該校正數據產生4路模擬電壓,將4路VGA增益設置成為一致性較好的狀態,從而起到不一致性校正的目的。
實際應用時,利用查表法進行不一致校正,假設A,B,C,D分別代表四象限激光探測器的4個象限對應的4路信號,如果是以A路信號為基準,在3倍(9.5dB)增益時,對B路信號進行校正,假設對VGA配置增益為3倍(9.5dB)增益時,DAC的12bit數據為D0,校正的目標偏差范圍為σ。通過校正軟件測試B路信號與A路信號峰值的差值為Δx,假設Δx>σ,則以十進制數1為步進將送往DAC的B路模擬電壓對應的12bit數據增加致D0+1,寫入DAC,重新設定VGA增益后,再重復上述過程,直至到第N次,ΔxN<σ,將此時的12bit數據D0+N寫入FLASH相應的存儲單元中,作為B路信號的校正數據,在實際應用中,到接收到的激光能量與3倍增益匹配時,從FLASH相應的存儲單元中讀出該校正數據,并以此設置VGA增益。對C路和D路信號重復上述校正過程,最終可使得4路信號的一致性都在要求的σ范圍內,從而達到一致性校正的目的。
5 試驗和半實物仿真驗證
對于激光制導導引頭而言,線性區是衡量其制導性能的一項重要指標,線性區曲線越是接近于直線,則表明其制導精度越高[7-10]。為了驗證該校正方法的效果,對一個視場范圍為±4°的激光導引頭進行校正前后線性區的測試,測試結果如圖8和圖9所示。對比圖中的線性區曲線可以看出,經校正后的線性區曲線更接近于直線,表明其線性度越好,測角精度更高,對于伺服平臺而言,可明顯提高控制精度。

Fig.8 Calibration curve of horizontal direction linear area
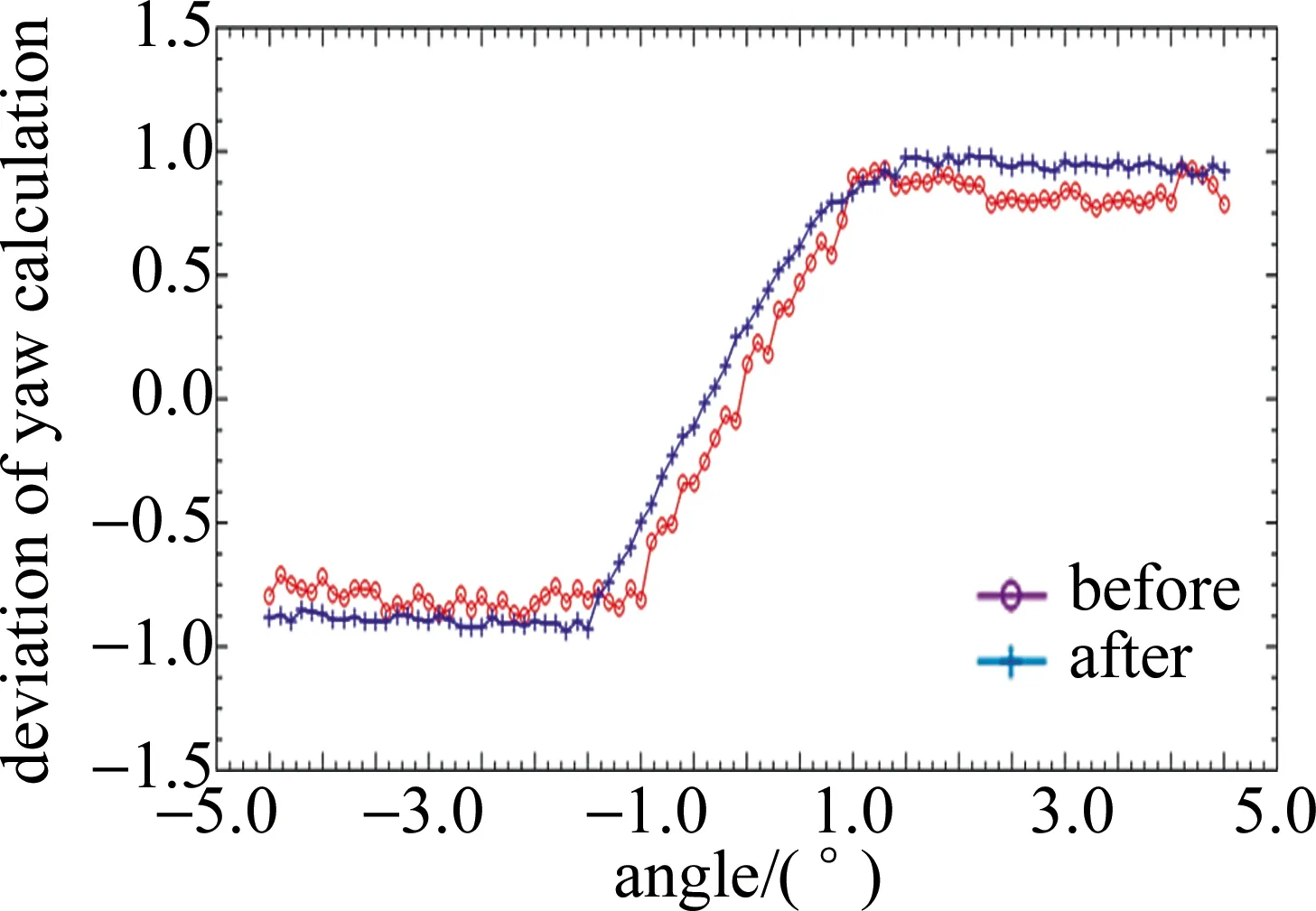
Fig.9 Calibration curve of azimuth direction linear area
半實物仿真是以最接近導彈(或炸彈)真實的飛行過程的方式評估其命中精度的手段。一般采用圓概率偏差(circular error probable,CEP) 描述導彈命中精度[11-12]。為了更加充分地驗證本文中提出的不一致性校正方法對制導精度的影響,還通過半實物仿真進行了驗證,針對同一枚導引頭產品,對采用該校正方法前后的狀態分別進行了3次半實物彈道仿真,CEP統計見表1。在仿真過程中,為了排除信噪比變化對仿真結果產生的影響,使激光目標模擬器的能量保持恒定,從而保證信息處理電路的VGA處于相同的增益點。
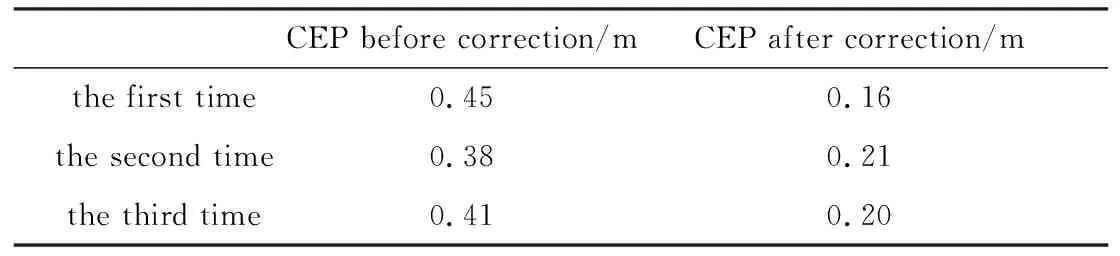
Table 1 Statistical table of miss distance in semi-physical simulation
由于本文中提出的校正方法,針對實際使用的各離散增益點,對4個采集通道的輸出響應進行精確校正,從而最大程度地減小了導引頭輸出的俯仰、偏航兩個方向上與目標夾角的偏移量,最終達到提高制導精度的目的。
通過表中半實物仿真脫靶量數據可以看出,校正后可以將CEP數值降低約50%,理論上可以明顯提高激光導引頭的制導精度和打擊精度。
6 結 論
針對半主動激光制導導引頭中對4個采集通道響應不一致性校正的實際需求,進行了深入研究和探索,重點研究了信息處理處理電路中的增益控制電路,分析了其設計要點,并給出了一種增益控制電路的設計原理圖,提出了一種基于該增益控制電路的通道間響應度不一致性校正方法,該方法針對導彈(或者炸彈)實際飛行過程中的各個離散增益點,進行不一致性校正。通過校正前后實測的線性區標定曲線和半實物仿真脫靶量的對比,驗證了該校正方法的效果。該校正方法具有校正效率高、校正精度高、資源開銷低和易實現的優點,在實際工程應用中有較強的實用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56