基于Delphi-模糊Petri 網的航空發動機故障診斷
2021-01-12 03:47:56張光宇張福光程繼紅
航空發動機 2020年6期
張光宇,張福光,程繼紅
(海軍航空大學岸防兵學院,山東煙臺264001)
0 引言
航空發動機為飛機或其他航空器提供動力來源,具有高度復雜與精密的特點。飛機整體的可靠性和經濟性與航空發動機息息相關[1-2],未來的發動機還將使用綜合智能化的數字電子控制系統[3],更會增加其復雜性。如何準確定位發動機的故障部位,判斷故障原因,一直是其維修保障過程中的關鍵問題[4]。目前國內發動機故障診斷方法有神經網絡法、深度學習法、模糊粗糙集法、支持向量機方法、軟件仿真法等,針對不同類型故障有著各自特點。
Petri 網方法是德國科學家Carl Adam Petri 提出的1 種建模方法。對于進程或部件的順序、沖突以及同步等關系,Petri 網方法比其他方法的描述更方便,并且其獨有的運算方法的修改與改進更為便捷[5]。將Petri 網理論用于故障診斷目前在電網系統、工程液壓系統、航空航天、高鐵運輸等領域中有很多應用實例,基于模糊Petri 網(Fuzzy Petri Net)的故障診斷方法將Petri 網與模糊理論相結合,將運算規則、置信度及變遷等模糊化,把知識表示和診斷推理融為一體[5]。Delphi 法是1 種傳統的定性與定量相結合的研究方法,具有較好的綜合性。
本文將模糊Petri 網的理論與Delphi 法相結合,用于航空發動機的故障診斷,討論其故障診斷模型的建立及運算規則,并進行了實例驗證。
1 針對故障診斷的模糊Petri 網
模糊Petri 網可以用來描述系統不確定性知識,是1 種較好的圖形化建模工具[6],而故障診斷過程就是充滿著模糊性及不確定性的過程,用模糊Petri 網來處理這種模糊規則的故障診斷事件,解決了傳統Petri 網只能處理精確知識,無法處理現實事件中不確定性知識的問題[7]。
1.1 模糊Petri 網
在Petri 網中,有以下幾個基本的構成要素[8]:
(1)用庫所(Place)來表示狀態,一般用圓表示。
(2)用變遷(Transition)表示事件或者轉換過程,一般用矩形來表示。
(3)用流關系(Flow Relation)表示事件發生的條件,或者用弧(Arc)來表示庫所與變遷之間的關系。
(4)標志(Token)一般用庫所里的點來表示,或者直接寫成數字,表示系統中的數據、狀態或者資源。
以上要素構成了網(Net)的基本結構,如圖1所示。
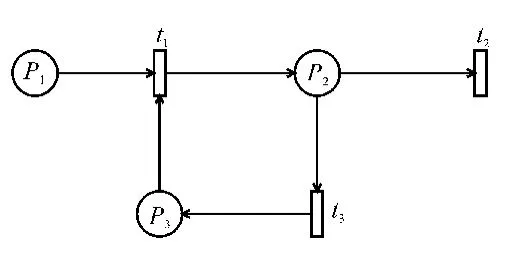
圖1 基本Petri 網的結構
不同的文獻在不同的應用背景下,對模糊Petri網給出過多種定義,將模糊式產生規則與基本Petri網的定義相結合,那么模糊Petri 網就有了如下的8元組[9]定義

式中:P={p1,p2,…,pn}為所有庫所節點的有限集合;T={t1,t2,…,tm}為變遷節點的有限集合;α?(P×T)和β?(T×P)分別為庫所到變遷和變遷到庫所的流關系,在模型中也就是有向弧;I和O分別為變遷到庫所的輸入函數和庫所到變遷的輸出函數;μ∈[0,1]為庫所為真或變遷發生規則的置信因子;θ為變遷規則發生的閾值,當變遷的置信度μ>θ時,變遷才會發生。
不同于傳統Petri 網,模糊Petri 網并不存在并發與沖突的問題;庫所內的標志的個數也只有0 或1 這2 種狀態,這是因為在模糊Petri 網中,庫所代表的是故障模式,只有故障不發生和故障發生2 種模式;同時在變遷上也多了1 個介于0 和1 之間的可信度。
1.2 模糊式產生規則
模糊式產生規則表示的是輸入庫所與輸出庫所的模糊關系,在故障診斷模型中即為故障事件與故障原因的1 種模糊關系,在這里采用在MYCIN 專家系統中的1 種推理方法,即基于可信度的不精確推理[8],主要包括以下幾種[10-11]:
(1)基本型。如圖2(a)所示。Ri:ifpi,thenpj(CFpi=μi),在該型規則下,變遷t 的前與后只有1 個輸入庫所與輸出庫所,輸出庫所的置信度μj=μi·μt,即輸入庫所的置信度μi與變遷的置信度μt的乘積。
(2)“與”型。如圖2(b)所示。Ri:if p1and p2and…and pn,thenpj(CFpi=μi),在該型規則下,變遷有多個輸入庫所,但是只有1 個輸出庫所,輸出庫所的置信度,其中為μ1,μ2,…,μn的均值(i=1,2,…,n)。
(3)“或”型。如圖2(c)所示。Ri:if p1or p2or…or pn,thenpj(CFpi=μi),在該型規則下,變遷t1到tn的輸出庫所都是pj,且每個變遷對應自身的輸入庫所,輸出庫所的置信度μj=max {μi·μti},即其中最大的置信度。
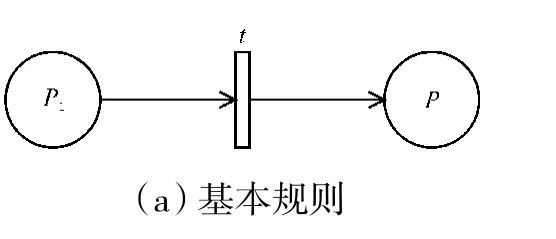
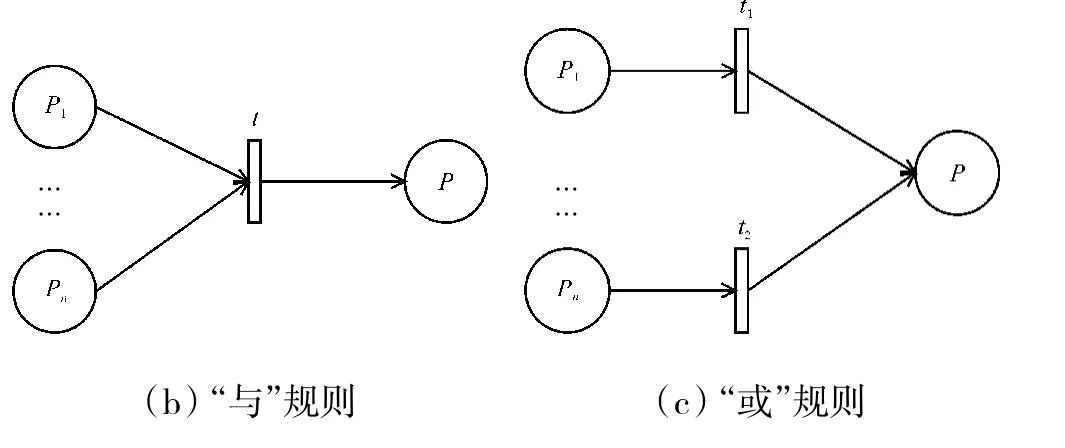
圖2 模糊式產生規則
以上CF={μ1,μ2, …,μn} 為有限的規則置信度集合,置信度μi∈[0,1],在此范圍內μi的值越大,表示庫所代表的故障事件或者變遷代表的故障行為越有可能發生。
1.3 基于Delphi-模糊Petri 網故障診斷的推理過程
Delphi 法適用于沒有精確資料的問題研究[12],綜合性較強,常被用在預測及評價領域,但該方法具有主觀性,將其與模糊Petri 法相結合,進行故障診斷問題的推理。
故障診斷的過程一般是對故障現象進行分析,推理出故障的具體原因及故障結論,也就是所謂的反向推理[13],找出所有可能導致故障發生的輸入庫所以及傳播路徑,并比較置信度大小,從而判斷故障起始原因。
在Delphi-模糊Petri 網故障診斷方法中的推理過程[14]如下:
(1)根據實際故障情況進行分析,確定故障模式。
(2)采用Delphi 法,通過調查問卷的形式綜合分析專家的觀點及日常工作經驗,確定置信度等定量數據。
(3)對庫所的權重進行賦值。
(4)根據置信度μ 與閾值θ 的比較,選出導致最終故障的變遷規則置信度最大的庫所。
(5)依次計算所有庫所的概率,根據預先設定的初始置信度與模糊規則計算每個初始庫所到最終庫所的置信度,并與閾值θ 進行比較,若大于閾值,則命題成立。
(6)比較所有命題成立的庫所置信度大小,按照置信度越大越優先的順序排列,推理過程結束。
2 基于Delphi-模糊Petri 網的航空發動機故障診斷實例模型
在進行故障診斷時,如何盡快定位故障原因,減少不必要的冗余推理,并將各類故障的可能性盡可能排列出來,是Delphi-模糊Petri 網故障診斷方法要解決的問題。
2.1 航空發動機故障診斷實例描述
某型軍用教練機現單發裝備某型渦扇發動機。根據部隊實際工作調研,在日常飛行過程或地面檢查試車中,會出現最小滑油信號燈燃亮、滑油壓力擺動過大、滑油壓力超規定值等故障。由于滑油系統部件較多,滑油工作條件惡劣,發動機對滑油系統的要求又較為嚴格,給地勤維護保障人員的排故工作帶來一定的挑戰。
結合保障一線的實際情況,選取某型發動機滑油系統故障中的1 種:最小滑油信號燈燃亮,進行基于模糊Petri 網的模型構造。該故障關系如圖3 所示。
從圖中可見,造成最小滑油信號燈燃亮的3 個主要原因是滑油壓力異常、壓力傳感信號異常和其他非典型故障(此類故障出現可能性小,多為意外故障)。滑油壓力異常是指滑油在工作過程中壓力確實超過了規定值,其原因主要包括滑油油量不足、滑油系統存在氣塞、調壓活門故障、滑油泵故障、滑油箱損壞;壓力傳感信號異常是指僅為信號問題,而滑油壓力正常,其原因主要包括最小滑油壓力信號器故障、溫度與金屬屑信號器故障、磁性堵塞或滑油濾有金屬屑。
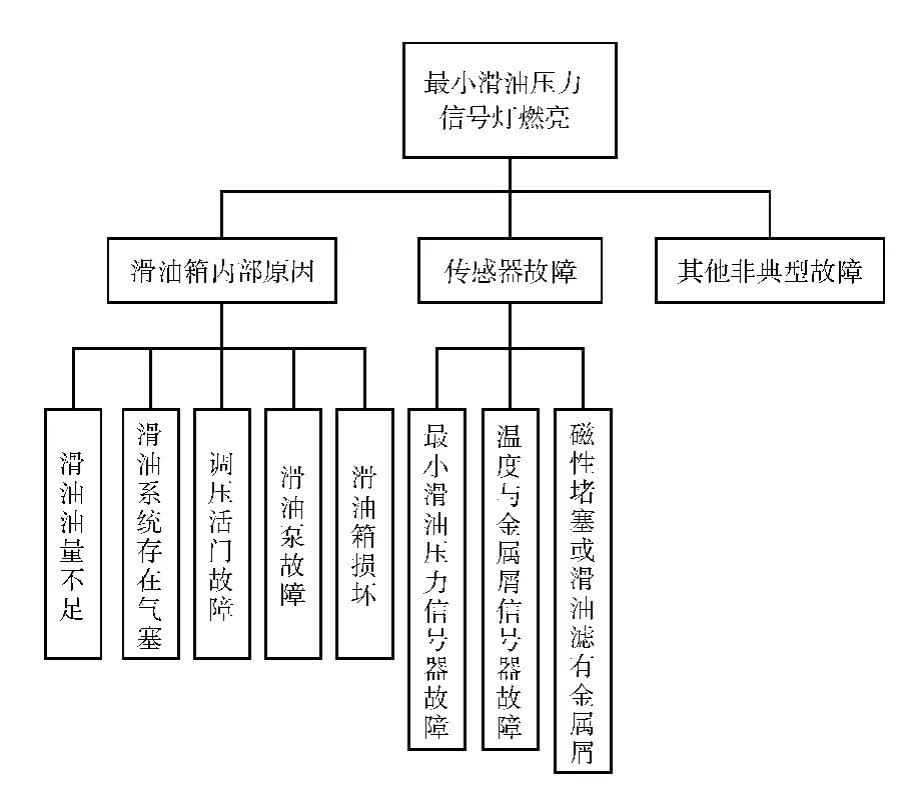
圖3 故障關系
2.2 故障診斷模型建立與分析
在模型分析中,閾值的選取很關鍵,閾值定得過大,故障可能無法被檢出,造成漏診;而閾值定得過小,系統又容易產生誤診。根據該型發動機在實際使用過程中的滑油系統故障報告統計及FMECA 方法[15],結合Delphi 方法,按照文獻[16]中的單因素確定方法的計算流程,制定出合理的故障檢測閾值,選取故障閾值θ=0.6,其他各初始庫所的置信度以及各變遷的置信度皆可由以上方法得出。
根據之前的故障分析與故障關系,結合模糊Petri網,用庫所來表示故障模式,變遷表示故障行為,按照各類故障的從屬關系建立起的故障診斷模型如圖4所示。

圖4 最小滑油信號燈燃亮故障診斷模糊Petri 網模型
模型中庫所、變遷的含義以及置信度等見表1。
根據建立起來的模糊Petri 網模型,分析計算過程如下:
(1)p12為最終庫所,也就是最小滑油壓力信號燈燃亮,可知引發p12發生的路徑有3 條,分別為p10→p12,p11→p12,p9→p12;屬于它們的變遷規則的置信度里最大的為μt10=0.9,故優先選擇路徑p10→p12。
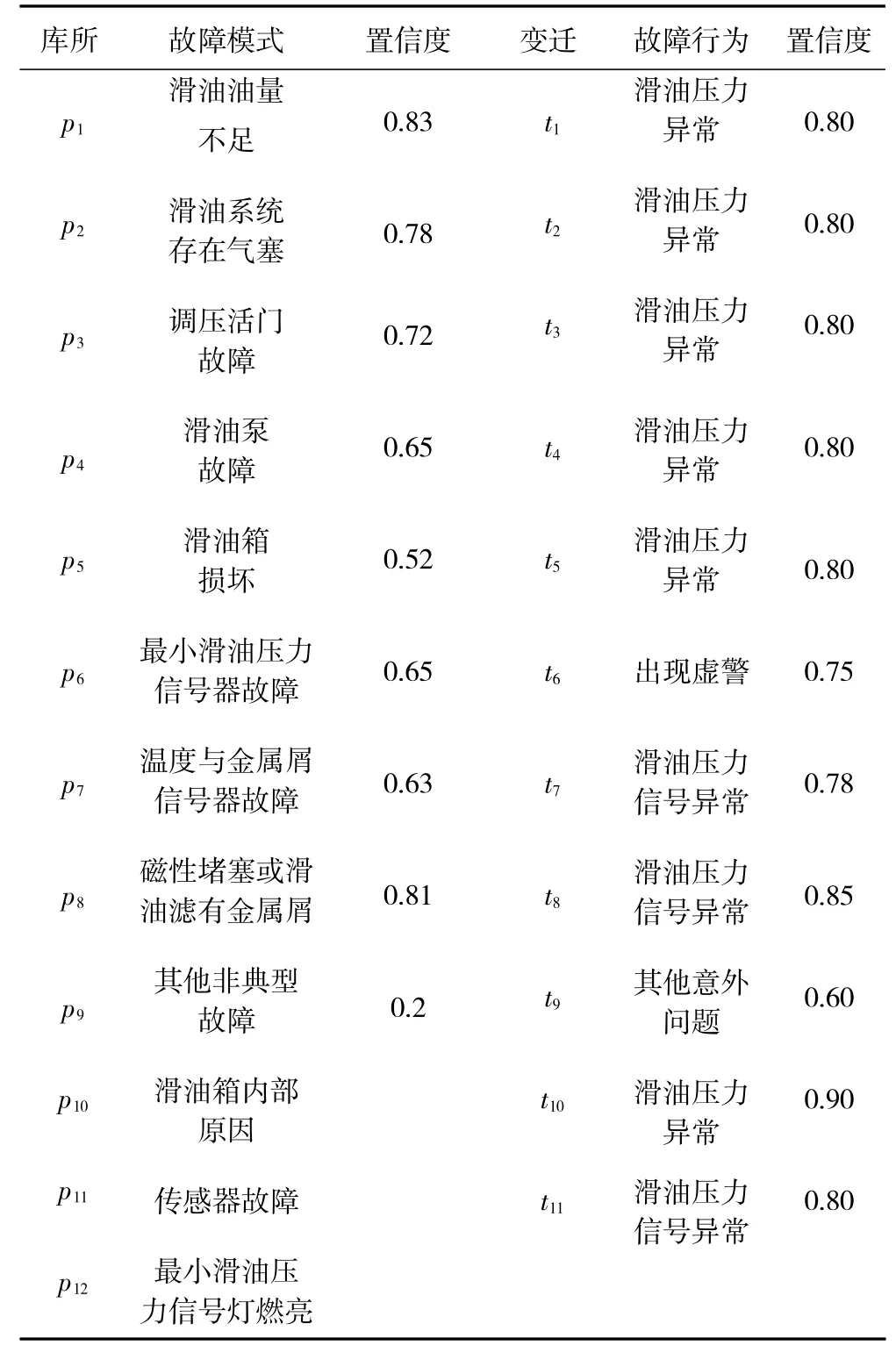
表1 庫所、變遷含義及置信度
(2)再分別計算路徑p1→p10,p2→p10,p3→p10,p4→p10,p5→p12的置信度分別為:μ1=μp1·μt1=0.664,μ2=μp2·μt2=0.624,μ3=μp3·μt3=0.576,μ4=μp4·μt4=0.52,μ5=μp5·μt5=0.416,可知μ1>μ2>θ,故變遷t1與t2會發生。
(3)再選擇p11→p12路徑,分別計算出p6→p11,p7→p11,p8→p11路徑的置信度為:μ6=μp6·μt6,μ7=μp7·μt7,μ8=μp8·μt8;可以看到μ8>θ,故變遷t8會發生。
(4)路徑p9→p12的置信度為:μ9=μp9·μt9=0.12,遠小于θ。
經過推理分析可知,導致最終庫所P12發生的起始庫所為P1、P2、P8,如圖5 所示。根據置信度的大小排序,P8最有可能發生,也就是磁性堵塞或滑油濾有金屬屑最有可能是故障原因;其次是P1,滑油油量不足;然后是P2,滑油系統存在氣塞。因此,以上3 種故障原因要優先排查。
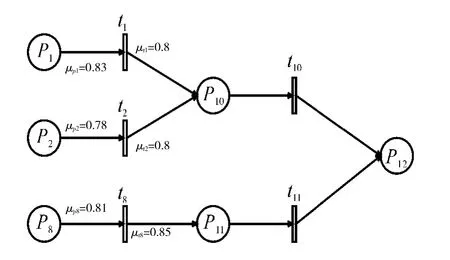
圖5 可能的故障原因路徑
在實際工作中,一線機務人員的排故過程是先檢查磁性堵塞與滑油濾以及信號故障,再檢查滑油箱內部,在油箱內部先檢查油量與氣塞情況,基本與推理分析的結果一致。目前此種檢查模式已經在一線機務排故手冊中采用。該方法有效減少了在故障診斷過程中的冗余推理,節省故障診斷時間,提高故障診斷效率。
3 結束語
本文通過對故障診斷的建模計算與分析,得到與實際情況一致的推理結果。將Delphi 法與模糊Petri網的應用優勢結合在一起,采用反向推理,在推理計算過程中只需考慮與目標庫所有聯系的路徑,邏輯關系簡單清晰,減少了故障診斷中的冗余推理,并且能夠在推理過程中通過計算將所有故障可能性自動排列清楚,提高了故障診斷效率,能較好地處理故障事件中的模糊信息,為航空發動機故障診斷提供了1 種可行方法。
在下一步的研究工作中將重點解決閾值與置信度選取、加入時間因素等問題,以求更直觀地反映故障診斷效率。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車與新動力(2015年1期)2015-02-27 12:11:01
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年3期)2014-02-27 14:05:48