改進(jìn)型空中交通流量預(yù)測算法的驗(yàn)證與實(shí)現(xiàn)
2021-01-12 13:32:44曾培彬
計(jì)算機(jī)測量與控制 2020年12期
關(guān)鍵詞:系統(tǒng)
陳 愷,曾培彬,蔡 浩
(1.中國民用航空中南地區(qū)空中交通管理局 廣西分局,南寧 530000;(2.中國民用航空汕頭空中交通管理站,廣東 汕頭 515000;3.汕頭大學(xué) 工學(xué)院,廣東 汕頭 515000 )
0 引言
流量預(yù)測為空中交通管制員(以下簡稱管制員)提供航路容量、航路降落次序等信息并提供分配建議航路時(shí)隙,給出合理的航班流量管控決策,實(shí)現(xiàn)航班流量的有序管理和優(yōu)化空域效能,是當(dāng)前空中交通管制(以下簡稱空管)研究的熱點(diǎn)。
當(dāng)前較為常見的方法有利用同一航班有規(guī)律的歷史軌跡進(jìn)行四維飛行航跡預(yù)測實(shí)現(xiàn)預(yù)測[1]、運(yùn)用混合估算對(duì)航空器飛行狀態(tài)和模型進(jìn)行估計(jì)進(jìn)行預(yù)測設(shè)計(jì)[2]、研究隨機(jī)線性混合系統(tǒng)預(yù)測航空器飛行狀態(tài)的改變導(dǎo)致的4D航跡剖面改變[3-4]進(jìn)行預(yù)測設(shè)計(jì)、研究高斯混合模型并對(duì)航班相鄰時(shí)刻位置偏移量建模,利用機(jī)器學(xué)習(xí)算法優(yōu)化預(yù)測模型[5]等。這些研究為航跡預(yù)測開拓了新的算法思路,然而空管是動(dòng)態(tài)變化較大、實(shí)時(shí)性要求較高的工作,要求模型具有良好的魯棒性和預(yù)測的準(zhǔn)確性,符合現(xiàn)場運(yùn)行狀態(tài)的預(yù)測模型通常是需要多次驗(yàn)證的復(fù)雜模型,復(fù)雜程度比上述文獻(xiàn)提出的理論研究更加復(fù)雜。與此同時(shí),在實(shí)際現(xiàn)場運(yùn)行中復(fù)雜算法可能會(huì)對(duì)空管流量預(yù)測系統(tǒng)的運(yùn)行帶來較大的開銷,降低系統(tǒng)穩(wěn)定性,這對(duì)于空管工作而言是不可接受的。利用DTW算法匹配模型[6]和元胞傳輸預(yù)測模型[7]相對(duì)上述模型復(fù)雜程度要低,在空管流量預(yù)測系統(tǒng)具有更為實(shí)際的應(yīng)用價(jià)值。
實(shí)際上,空管行業(yè)規(guī)范近年已逐步規(guī)范相關(guān)監(jiān)視信息處理,信息源比以往更加豐富多樣,這些可以為流量預(yù)測提供較好的應(yīng)用資源,節(jié)省流量預(yù)測系統(tǒng)開發(fā)的時(shí)間和成本。基于空管現(xiàn)場實(shí)際運(yùn)行需求,本文設(shè)計(jì)了一種利用實(shí)時(shí)的空中交通管制自動(dòng)化系統(tǒng)(以下簡稱空管自動(dòng)化系統(tǒng))綜合航跡數(shù)據(jù)和飛行計(jì)劃數(shù)據(jù),建立4D航跡剖面模型,并能根據(jù)航空器運(yùn)行態(tài)勢(shì)實(shí)時(shí)修正預(yù)測航跡,實(shí)現(xiàn)區(qū)域航班流量精確預(yù)測的方法。
1 空管數(shù)據(jù)源及關(guān)鍵技術(shù)研究
1.1 系統(tǒng)應(yīng)用的空管數(shù)據(jù)源
綜合航跡數(shù)據(jù)是空管自動(dòng)化系統(tǒng)多種監(jiān)視源(雷達(dá)、ADS-B等)綜合處理產(chǎn)生的系統(tǒng)航跡與飛行計(jì)劃數(shù)據(jù)融合的航跡信息,包含目標(biāo)航跡的WGS-84坐標(biāo)、高度、速度、航向角和24位地址碼等,通過解析目標(biāo)的綜合航跡數(shù)據(jù),流量系統(tǒng)可實(shí)時(shí)獲取航空器的運(yùn)動(dòng)態(tài)勢(shì)。
與此同時(shí),空管自動(dòng)化系統(tǒng)設(shè)計(jì)規(guī)范指出[8],空管自動(dòng)化系統(tǒng)應(yīng)可通過網(wǎng)絡(luò)或串口形式的方式輸出給予其他系統(tǒng)。這為本設(shè)計(jì)提供了較好的基礎(chǔ),直接采用空管自動(dòng)化系統(tǒng)綜合航跡進(jìn)行開發(fā),航跡更新周期在合理范圍可進(jìn)行調(diào)節(jié),航跡更新速度快,完全滿足流量系統(tǒng)開發(fā)所要求的高時(shí)效性和穩(wěn)定性,同時(shí)也提高了開發(fā)效率。
MH4029.3是民用航空空中交通管制自動(dòng)化系統(tǒng)第3部分:飛行數(shù)據(jù)交換規(guī)范[9]。其指出基礎(chǔ)飛行數(shù)據(jù)交換報(bào)文(以下簡稱:IFPL),用于空管自動(dòng)化系統(tǒng)及相關(guān)系統(tǒng)間基礎(chǔ)飛行數(shù)據(jù)交換,其主要包含航班號(hào)、起降機(jī)場、航班起降時(shí)間、航路等信息。流量系統(tǒng)可通過IFPL報(bào)獲取航跡的計(jì)劃信息,建立計(jì)劃航跡剖面模型,當(dāng)計(jì)劃信息變更時(shí),重新修正計(jì)劃航跡剖面,使計(jì)劃航跡具備良好的計(jì)劃迭代性。
1.2 改進(jìn)型4D航跡預(yù)測算法
在航空器實(shí)際飛行過程中,特別是在雷雨繞飛情況下,航空器會(huì)偏離航路飛行,因此,要對(duì)偏航航空器的4D預(yù)測航跡進(jìn)行修正,此處提出計(jì)劃航跡和雷達(dá)航跡偏離的自動(dòng)相關(guān)算法:

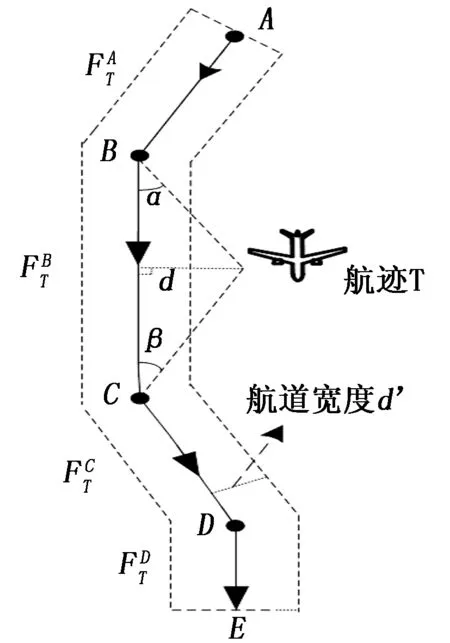
圖1 航跡飛行圖

此外,計(jì)劃航跡和雷達(dá)航跡相關(guān)一般考慮以下匹配因子:航跡T到達(dá)最近一個(gè)航路點(diǎn)的時(shí)間τi,航向角αi,偏離角βi,與航段的距離λi。




設(shè)航路寬度為20 km,當(dāng)d<10 km時(shí),認(rèn)為該航空器是沿著當(dāng)前航段飛行,經(jīng)過某一航路點(diǎn)后,以當(dāng)前航路點(diǎn)過點(diǎn)時(shí)間為基準(zhǔn),利用等角航跡預(yù)測算法[14]進(jìn)行后續(xù)航路過點(diǎn)時(shí)間的推算,更新4D剖面航路。當(dāng)d>=10 km時(shí),表示該航空仍在航段范圍內(nèi),但屬于偏航飛行,則需將航跡T當(dāng)前航向角與后續(xù)航段的航向角進(jìn)行比較,以最小角度差值作為航跡T的最終預(yù)測位置點(diǎn),并以航跡T當(dāng)前時(shí)間、速度和高度等信息來推算到達(dá)目的位置的時(shí)間,更新后續(xù)航路的過點(diǎn)時(shí)間,從而更新4D剖面模型。
1.3 改進(jìn)型流量統(tǒng)計(jì)算法
實(shí)時(shí)飛行流量計(jì)算是流量管理系統(tǒng)一個(gè)重要組成部分。計(jì)算管制空域內(nèi)的流量關(guān)鍵在于判斷航空器所處的空域。因此,可以將空域投影在平面進(jìn)行分析,進(jìn)而轉(zhuǎn)化成平面的點(diǎn)空域、線空域、面空域。
1.3.1 改進(jìn)型點(diǎn)空域統(tǒng)計(jì)
點(diǎn)空域流量主要包含航路的固定點(diǎn)、導(dǎo)航點(diǎn)、邊界點(diǎn)的流量,傳統(tǒng)的判斷方法是以該導(dǎo)航點(diǎn)坐標(biāo)為圓心、某一經(jīng)驗(yàn)值參數(shù)為半徑的圓設(shè)定過點(diǎn)判斷范圍,當(dāng)航空器的平面投影進(jìn)入判斷范圍,則判定該航空器為某航路導(dǎo)航點(diǎn)的流量目標(biāo),如圖2所示。這種方式能夠簡單處理正常飛行的航空器過點(diǎn)判斷,然而,航空器在實(shí)際飛行過程中,在航路導(dǎo)航點(diǎn)附近可能存在偏航情況(特別是雷雨季節(jié)或軍航活動(dòng)較頻繁的區(qū)域),利用這種方式的計(jì)算容易出現(xiàn)誤判,計(jì)算過點(diǎn)時(shí)間也有較大的誤差。因此,此處引入一種改進(jìn)型點(diǎn)空域飛行流量統(tǒng)計(jì)模型,如圖3所示。A、B、C分別為航路上3個(gè)航路固定點(diǎn),線段BD為航路點(diǎn)B的角平分線,即∠α=∠β。航空器與角平分線相交于角P,角度為φ,∠α,∠β,∠φ均是相對(duì)于正北方向的角度值。已知A、B、C的WGS-84系坐標(biāo)經(jīng)緯度,通過高斯投影[15]算法將其轉(zhuǎn)換成平面直角坐標(biāo)系,得到A、B、C點(diǎn)坐標(biāo)分別為PA(XA,YA),PB(XB,YB),PC(XC,YC)。
利用余弦定理推算出:

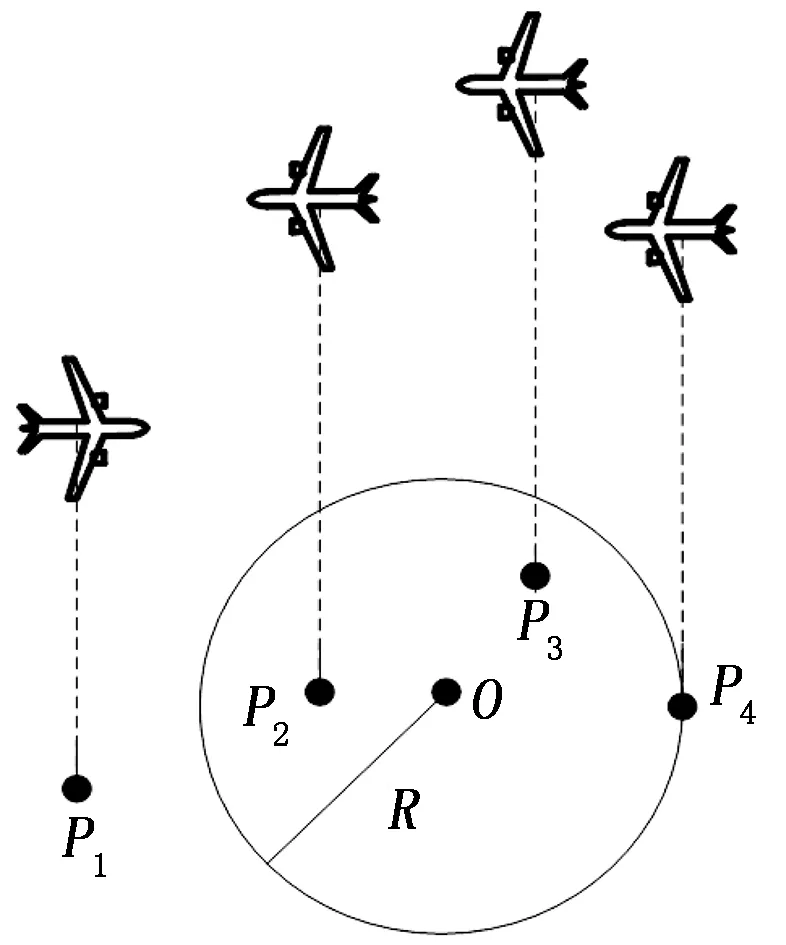
圖2 常規(guī)點(diǎn)空域?qū)崟r(shí)飛行流量計(jì)算模型
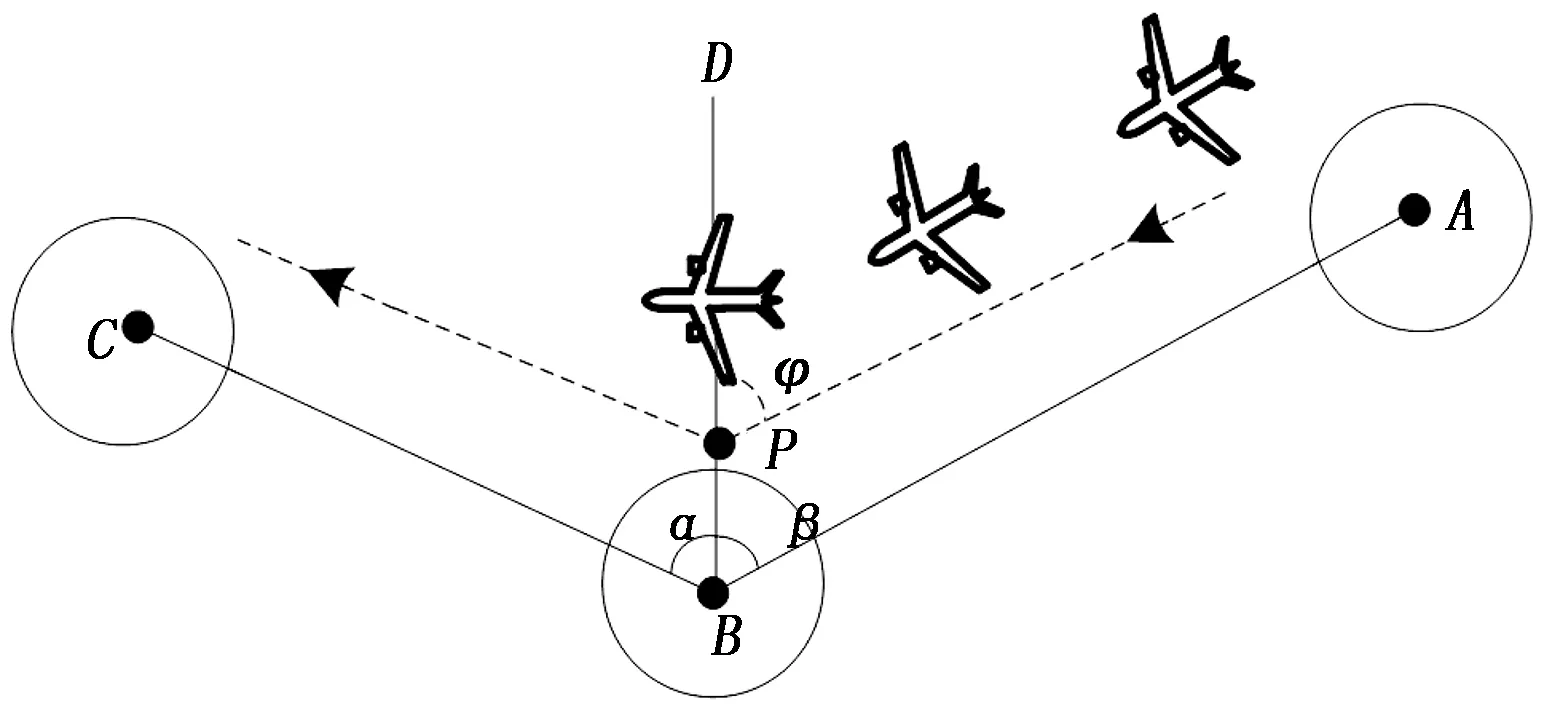
圖3 改進(jìn)型點(diǎn)空域?qū)崟r(shí)飛行流量計(jì)算模型
1.3.2 改進(jìn)型線空域統(tǒng)計(jì)算法
航空器A、B、C、D分別位于不同高度層,其平面投影依次為a、b、c、d,e和f是航路上的導(dǎo)航點(diǎn),r是航路寬度。傳統(tǒng)的航路流量計(jì)算方法主要通過獲取航空器的平面投影位置進(jìn)行流量計(jì)算。如圖4所示,a、b、c在航路范圍內(nèi),d不在航路范圍內(nèi),說明此時(shí)航路流量為3架次。但此方法無法滿足常見的航空器偏離航路后再回到航路飛行的情況。因此,此處提出一種利用航向角來判斷航空器運(yùn)動(dòng)趨勢(shì),實(shí)現(xiàn)航路流量實(shí)時(shí)計(jì)算的方法。

圖4 常規(guī)線空域?qū)崟r(shí)飛行流量計(jì)算模型

圖5 改進(jìn)型線空域?qū)崟r(shí)飛行流量計(jì)算模型
假設(shè)四邊形A1A2B2B1是AB段航路,A和B是導(dǎo)航點(diǎn),航路寬度為20 km,B1和B2是B的對(duì)稱點(diǎn),長度為10 km。∠BAC是航空器沿航路由A飛行至B相對(duì)正北方向的航向角,∠B1AC和∠B2AC是航空器在航路寬度范圍內(nèi),左右偏離航路到達(dá)B點(diǎn)相對(duì)正北方向的最大航向角,如圖5所示。因此,判斷航空器平面投影是否在有效航路范圍內(nèi),可以通過雷達(dá)數(shù)據(jù)實(shí)時(shí)獲取航空器航向角。若采集的航向角∠β滿足∠B1AC≤∠β≤∠B2AC,則可判斷航空器沿航路飛行,并將其歸納為該航路的實(shí)時(shí)流量隊(duì)列。算法步驟如下:
由上述可知,A和B點(diǎn)的平面坐標(biāo)可通過高斯投影計(jì)算,則:
(1)
∠BAC=∠1
(2)
(3)
(4)
∠B1AB2為等腰三角形,因此,∠B2AC=∠BAC+∠4;∠B1AC=∠BAC-∠4;本設(shè)計(jì)通過引接空管自動(dòng)化系統(tǒng)的綜合航跡和MH4029.3飛行計(jì)劃信息,便可使用簡單的算法實(shí)現(xiàn)航路實(shí)時(shí)流量計(jì)算。假設(shè)多架航空器由導(dǎo)航點(diǎn)e進(jìn)入航路,先通過綜合航跡直接獲取航空器的當(dāng)前航向角矢量,所獲取的航向角與系統(tǒng)離線自定義的OBA表(存放所有航路導(dǎo)航點(diǎn)之間的最大和最小航向偏移角)進(jìn)行比較,并以此判斷航空器的運(yùn)動(dòng)趨勢(shì);另一方面,系統(tǒng)可以通過空管自動(dòng)化系統(tǒng)的IFPL報(bào)文中的扇區(qū)字段sector獲取航空器當(dāng)前管制扇區(qū)。實(shí)際運(yùn)行中,系統(tǒng)將對(duì)滿足述條件的航空器出現(xiàn)頻度進(jìn)行統(tǒng)計(jì),當(dāng)出現(xiàn)次數(shù)大于系統(tǒng)設(shè)置參數(shù)時(shí),目標(biāo)航空器的呼號(hào)、扇區(qū)等信息將存入系統(tǒng)設(shè)置的航路流量HashMap[16]表,進(jìn)入航路的實(shí)時(shí)流量統(tǒng)計(jì)隊(duì)列。當(dāng)已進(jìn)入隊(duì)列的航空器航向角或扇區(qū)管制權(quán)限發(fā)生變更時(shí),系統(tǒng)不再對(duì)該航空器進(jìn)行航路流量統(tǒng)計(jì),算法流程如圖6所示。

圖6 航路飛行流量計(jì)算流程圖
面空域流量計(jì)算可以等效為具備管制扇區(qū)的航空器就直接列入該空域的流量統(tǒng)計(jì)隊(duì)列,系統(tǒng)則可以直接利用IFPL報(bào)中的sector字段對(duì)航空器進(jìn)行扇區(qū)歸類統(tǒng)計(jì)。
2 算法的驗(yàn)證與實(shí)現(xiàn)
文獻(xiàn)[6]提出通過分析雷達(dá)數(shù)據(jù)及交通流特性,將扇區(qū)交通流按一定原則劃分成5種標(biāo)準(zhǔn)模式,然后利用DTW算法對(duì)選取測試序列進(jìn)行模式匹配,最后統(tǒng)計(jì)該模式下扇區(qū)最大流量,求出扇區(qū)的運(yùn)行容量。對(duì)于某管制扇區(qū)短時(shí)間內(nèi)航班預(yù)測流量過大時(shí),管制員會(huì)根據(jù)空域情況實(shí)時(shí)調(diào)整航空器的航路或高度。在這種情況下,均會(huì)觸發(fā)自動(dòng)化系統(tǒng)重新對(duì)該航空器4D剖面計(jì)算模型修正,根據(jù)4D軌跡和管制區(qū)、扇區(qū)的物理關(guān)系,更新管制區(qū)內(nèi)扇區(qū)之間交接點(diǎn)和每個(gè)航路報(bào)告點(diǎn)的所屬扇區(qū)。因此,隨著航空器改航頻率越高,交通流模式聚類匹配相似度越低,在一定程度上影響了扇區(qū)容量計(jì)算的精度。
采用2020年1月20 日南寧(ZGNN)區(qū)域雷達(dá)記錄數(shù)據(jù)及飛行計(jì)劃數(shù)據(jù),數(shù)據(jù)包含同一時(shí)間段各管制扇區(qū)的流量信息,研究本文流量統(tǒng)計(jì)算法與DTW統(tǒng)計(jì)算法在特定空域條件下扇區(qū)流量變化情況,得到扇區(qū)與航空器飛行高度關(guān)系實(shí)測流量散點(diǎn)如圖7所示。
其中,E1,E2,E3為南寧空域低扇,E4,E5,E6分別對(duì)應(yīng)E1,E2,E3的高扇。由圖7可知,本文所研究的統(tǒng)計(jì)算法得到E1扇區(qū)接管航班的密度大于E4扇區(qū),是由于相鄰廣州管制區(qū)限制飛行高度,導(dǎo)致以往由E4扇移交給廣州的航班大部分轉(zhuǎn)移至E1扇區(qū)接管,并按指定高度對(duì)外移交;由于DTW統(tǒng)計(jì)算法仍根據(jù)歷史序列進(jìn)行模式匹配,得到E4扇區(qū)接管航班的流量密度較大,與實(shí)際運(yùn)行情況有所差異。對(duì)于其它扇區(qū),由于沒有出現(xiàn)外管制區(qū)限高飛行或雷雨繞飛等情況,利用本算法和DTW統(tǒng)計(jì)算法得到的航空器流量密度值基本保持一致性。
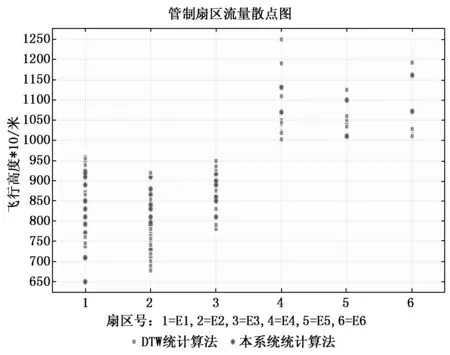
圖7 特定空域下兩種統(tǒng)計(jì)算法流量對(duì)比圖
采用某天南寧終端區(qū)空域航班較為正常的實(shí)際數(shù)據(jù)進(jìn)行流量預(yù)測實(shí)驗(yàn),如圖8所示。基于元胞傳輸?shù)念A(yù)測模型[7]也能較好描述了正常時(shí)間段內(nèi)航班流量預(yù)測波動(dòng)趨勢(shì),預(yù)測結(jié)果稍比本算法粗略,誤差波動(dòng)大于基于偏航修正的4D航跡預(yù)測模型。而在具體工程實(shí)踐上,該算法的元胞劃分需要根據(jù)空域具體情況進(jìn)行,機(jī)場的終端區(qū)特別是低緯度機(jī)場終端區(qū)的夏季天氣變化較大(如南寧機(jī)場),不可預(yù)測情況較多,航空器需要采用多種管制策略,對(duì)于元胞傳輸預(yù)測而言算法實(shí)現(xiàn)困難。如若需要進(jìn)行工程設(shè)計(jì),該算法需要機(jī)器學(xué)習(xí),針對(duì)不同環(huán)境進(jìn)行參數(shù)的快速自我設(shè)置,算法實(shí)現(xiàn)復(fù)雜度較高。

圖8 兩種預(yù)測方法與實(shí)際流量對(duì)比圖
在實(shí)現(xiàn)方法上利用C/S架構(gòu),設(shè)計(jì)了一種基于JAVA的改進(jìn)型流量預(yù)測系統(tǒng)(如圖9所示),具備了動(dòng)態(tài)態(tài)勢(shì)界面、4D航跡剖面建立、流量預(yù)測與統(tǒng)計(jì)、流量告警和算法預(yù)測對(duì)比等功能。圖10是某一天南寧空域在雷雨天氣下E1管制扇區(qū)實(shí)時(shí)流量預(yù)測圖,為方便分析,此處統(tǒng)計(jì)04∶00至18∶00共16個(gè)時(shí)刻的流量預(yù)測和實(shí)際接管架次。與此同時(shí),系統(tǒng)繪制了基于傳統(tǒng)的工程實(shí)現(xiàn)方式(飛行計(jì)劃FPL對(duì)流量進(jìn)行預(yù)測)、雷達(dá)航跡修正預(yù)測、4D航跡預(yù)測以及系統(tǒng)預(yù)測的折線圖。從圖中可知,統(tǒng)計(jì)的16個(gè)時(shí)刻中,飛行計(jì)劃FPL進(jìn)行預(yù)測只有2個(gè)時(shí)刻點(diǎn)與實(shí)際接管架次數(shù)一致,這也說明空管工作具有較強(qiáng)的實(shí)時(shí)動(dòng)態(tài)性,提前120小時(shí)內(nèi)的飛行計(jì)劃[10]并無法完全實(shí)現(xiàn)流量預(yù)測的精準(zhǔn)。

圖9 南寧流量預(yù)測系統(tǒng)

圖10 不同預(yù)測算法對(duì)同一扇區(qū)實(shí)時(shí)流量預(yù)測圖
在凌晨05∶00,接管架次是統(tǒng)計(jì)所有時(shí)刻中架次最少的時(shí)刻,4D航跡預(yù)測和系統(tǒng)預(yù)測能較好匹配實(shí)際接管架次,其他預(yù)測方法也較為接近實(shí)際接管架次,這是因?yàn)樯葏^(qū)區(qū)域內(nèi)航空器架次少,空管的可控余量較大,管制員對(duì)區(qū)域內(nèi)的航空器的人為干預(yù)會(huì)更少,飛行復(fù)雜度降低,F(xiàn)PL計(jì)劃預(yù)測、雷達(dá)修正和4D航跡預(yù)測算法能夠簡單滿足預(yù)測。此種情況下,系統(tǒng)改進(jìn)的預(yù)測算法將更加貼近實(shí)際,預(yù)測結(jié)果架次與實(shí)際接管架次一致。在13∶00時(shí)刻,南寧空管現(xiàn)場該扇區(qū)空域出現(xiàn)午后大面積雷雨,不少航空器需要進(jìn)行繞飛,從圖中可以看出,所有預(yù)測算法預(yù)測的架次都與實(shí)際接管的架次有一定的差異,但系統(tǒng)改進(jìn)算法在實(shí)現(xiàn)中表現(xiàn)出最優(yōu)的效果,誤差率僅為4.3%,其他方法預(yù)測誤差率皆大于10%。隨著統(tǒng)計(jì)航班量的增加,系統(tǒng)預(yù)測算法預(yù)測的誤差將會(huì)進(jìn)一步的下降。
從總體走勢(shì)可以看出,系統(tǒng)設(shè)計(jì)的預(yù)測算法繪制的折線總體較其他算法預(yù)測折線更加貼近實(shí)際接管架次折線,采用本文的改進(jìn)型4D航跡預(yù)測(偏航修正)比常規(guī)4D航跡預(yù)測方法更能真實(shí)接近實(shí)際扇區(qū)接管航班的架次數(shù)量。通過系統(tǒng)實(shí)際運(yùn)行所采集的數(shù)據(jù)表明,在復(fù)雜天氣情況下,基于偏航修正的4D航跡預(yù)測,更能有效、準(zhǔn)確地預(yù)測航路、扇區(qū)交通流量。
由圖11可知,航跡平面投影法和運(yùn)用航向角投影法所統(tǒng)計(jì)的航班流量與實(shí)際航路交通流量基本一致,但運(yùn)用航向角投影法只需通過獲取航跡綜合航跡的航向角,與離線系統(tǒng)離線定義OBA表比較,算法具備實(shí)時(shí)性和高效性,能減少系統(tǒng)開銷。

圖11 管制區(qū)域重要航路流量統(tǒng)計(jì)圖
3 結(jié)束語
目前,系統(tǒng)已經(jīng)在民航廣西空管分局空中交通管制現(xiàn)場投入使用,用戶體驗(yàn)較好。可以得出以下結(jié)論:
1)該融合空管自動(dòng)化系統(tǒng)綜合航跡和IFPL計(jì)劃信息的4D航跡剖面預(yù)測模型,結(jié)合基于偏航修正的4D航跡預(yù)測算法和改進(jìn)型流量統(tǒng)計(jì)算法,能有效改善航跡預(yù)測和統(tǒng)計(jì)的誤差,實(shí)現(xiàn)高精度的4D航跡預(yù)測和流量統(tǒng)計(jì)。
2)空中交通流量預(yù)測是一個(gè)數(shù)據(jù)變化實(shí)時(shí)性較強(qiáng)的處理過程,需要針對(duì)現(xiàn)場實(shí)際運(yùn)行進(jìn)行大數(shù)據(jù)挖掘以提高相關(guān)算法和系統(tǒng)的運(yùn)行的準(zhǔn)確度。后續(xù)研究將利用二進(jìn)制氣象網(wǎng)格數(shù)據(jù)(GRIB)和其它航路氣象信息融合做進(jìn)一步的數(shù)據(jù)挖掘,并綜合考慮管制意圖等因素,建立更為完善的4D航跡模型,進(jìn)一步提高航跡預(yù)測精度。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32