物理天平實驗綜述報告
2021-01-15 02:11:18葉世海韓修林
儀器儀表用戶 2021年1期
葉世海,韓修林
(阜陽師范大學 物理與電子工程學院,安徽 阜陽 236037 )
0 引言
物理天平是基礎物理實驗中一個基本的測量工具,雖然眾所周知其測量原理是等臂杠桿平衡原理,即天平平衡時,待測物的重量與砝碼相等,進而得出待測物的質量與砝碼相等[1]。對于等臂杠桿,如圖1(a)和圖1(b)所示。
其支撐點O 在杠桿的中點,無論其處于水平還是傾斜平衡狀態,待測物的力臂R1都應與砝碼的力臂R2相等,待測物的重量與砝碼相等,進而待測物的質量與砝碼相等,那么稱量時為什么要求天平橫梁必須水平平衡呢?物理天平橫梁為什么是金屬片狀而不是桿狀?橫梁上感量指針及感量指針上的感量重錘作用是什么?橫梁測量精度(0.1g)[2]是如何定標出來的?這些問題實驗教材都未具體給出說明,使得學生對物理天平缺乏具體認識,造成天平實驗具體操作困難重重,稱量時產生較大測量誤差。為此筆者從等臂杠桿平衡原理著手,結合物理天平結構,對影響物理天平測量誤差的幾個因素做了具體的分析與研究,不僅使大家對物理天平有了深刻的認識,提高了測量精度,而且使大家理論聯系實際、分析問題、解決問題的水平得到大幅度提高,大大增強實踐創新這一綜合能力。
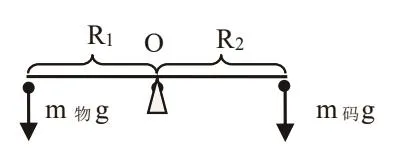
圖1 (a) 等臂杠桿水平平衡狀態Fig.1(a) Horizontal equilibrium state of equal arm lever

圖1 (b) 等臂杠桿傾斜平衡狀態Fig.1(b) Equal arm lever tilt balance state
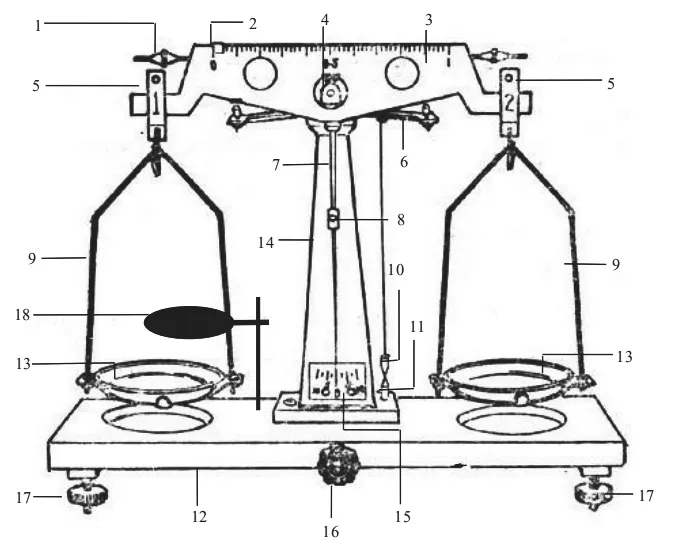
圖2 物理天平結構圖Fig.2 Structure of physical balance
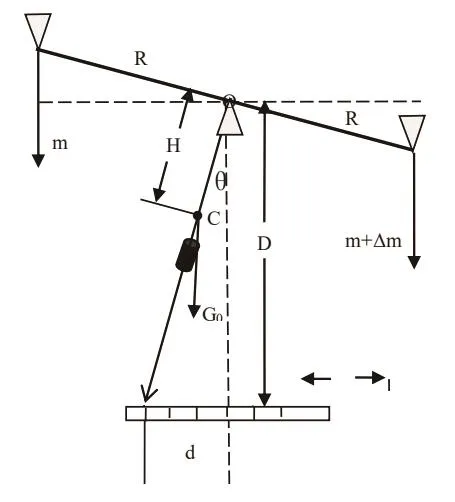
圖3 等臂天平傾斜平衡示意圖Fig.3 Inclined balance diagram of equal arm balance
1 物理天平的結構分析
物理天平的結構如圖2 所示,雖然其測量原理是等臂杠桿平衡原理,但是不能把它看作是一個簡單的等臂杠桿,因為當轉動支起旋鈕,支起橫梁時,橫梁、左右吊耳、盤架、盤和感量指針、感量重錘都要繞著中央支起刀口轉動,故物理天平的杠桿應看成由橫梁、左右吊耳、盤架、盤和感量指針、感量重錘組成的轉動系統。通過改變橫梁的質量分布和調節橫梁上調平螺母可以使系統重心(也可以認為是質心)落到感量指針上。等臂是指橫梁上左右吊耳刀口到中央支起刀口距離相等。當天平水平平衡時,顯然杠桿的重心與中央支起刀口處在同一重垂線上,其力臂為零,對轉動系統無影響,待測物與砝碼相對中央支起刀口力矩相等,而待測物與砝碼相對中央支起刀口力臂又相等,故待測物的重量與砝碼相等,進而得出待測物的質量與砝碼相等。
若天平傾斜平衡,如圖3所示。則杠桿的重心已偏離了中央支起刀口所處重垂線,其力臂不為零,力矩不為零,對轉動系統產生了影響,盡管待測物與砝碼相對中央支起刀口力臂仍相等,但待測物與砝碼相對中央支起刀口力矩已顯然不相等,故待測物的重量與砝碼不相等,進而得出待測物的質量與砝碼不相等,這樣就無法用砝碼質量定出待測物體的質量。這就是天平在稱量時必須水平平衡的原因。至于物理天平橫梁為什么是金屬片狀而不是桿狀,就是為了便于改變它的質量分布,使橫梁、左右吊耳、盤架、盤和感量指針、感量重錘組成的整個轉動系統重心(也可以認為是質心)落到感量指針上。
2 影響物理天平測量誤差的幾個因素
2.1 物理天平的感量
天平的感量就是天平在一定載重或空載時,使天平指針從平衡位置偏轉到感量刻度盤一分度所需增減的砝碼質量。天平銘牌上標示的感量是天平最大稱量時的感量,比最小稱量時的感量要大一點,如果是粗略測量這個結果也可以。圖2所示乃等臂天平,臂長R(左右吊耳刀口到中央支起刀口距離),由橫梁、左右吊耳、盤架、盤和感量指針、感量重錘組成的繞中央支起刀口轉動系統的重心為C,到中央支起刀口O的距離為H,重量為G0,橫梁距離標尺D,天平的感量用S表示。假設天平兩側負載均為m時,天平平衡,指針位于豎直向下,右盤增加質量為Δm的砝碼后,指針在標尺上移動距離d,指針偏轉角度θ,然后天平傾斜靜止,根據杠桿定點轉動的平衡條件有[4]:

由圖1所示的幾何關系有:
根據天平感量的定義可得:
由以上可以推出天平感量S的表達式如下:

由式(4)可知,可以通過調節感量重錘改變重心C的位置來改變天平的感量,受外部因素的影響,因R、D改變,也會使S發生變動[5],不過相對來說S算個定值。感量S的倒數叫天平的靈敏度, 就是在一個秤盤上加放小砝碼, 再看感量標尺上感量指針所偏轉的若干分度。偏轉的分度越多, 靈敏度就越高;偏轉的分度越少, 則說明天平的靈敏度就越低。所以感量也叫做“分度值”,常以“毫克”(mg)為單位,感量反映了天平的靈敏程度。橫梁上示值也是根據游碼沿橫梁移動感量指針偏轉情況定標出來的[6]。使用天平時會產生相對誤差,相對誤差與稱量質量和感量直接的關系是:式(4)表明感量是表征天平測量精度的一個量,顯然感量大精度低,感量小精度高。如果S發生變動,真實值與標稱值不相符,那么就會增加一定測量誤差,因此技術人員通常是通過調節感量錘來維持S為標稱值,減小這種誤差。
2.2 不等臂誤差對物理天平測量誤差的影響
天平空載平衡時,感量指針指在感量標尺中央刻度,只能說明天平重心C與中央支起刀口O在同一重垂線上,并不能說明天平等臂。天平的不等臂指的是橫梁上左右吊耳刀口到中央支起刀口不相等[7],如圖4所示。R1≠R2,天平稱量平衡時,根據平衡條件:
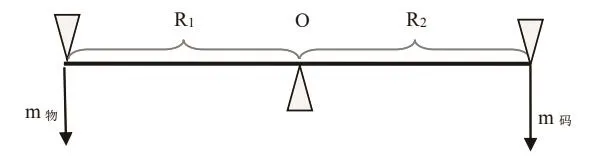
圖4 等臂天平稱量示意圖Fig.4 Weighing diagram of equal arm balance
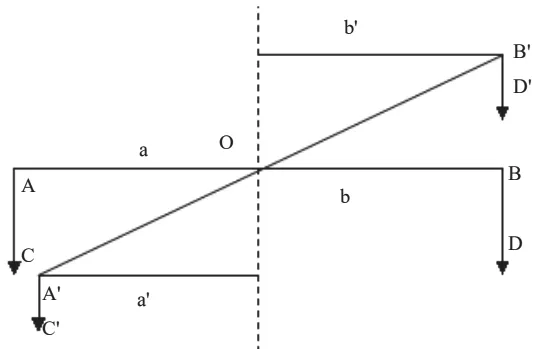
圖5 刀口連線及感量相等示意圖Fig.5 Schematic diagram of knife edge connection and equal sensitivity

所以m物≠m碼,而產生一定測量誤差。臂差帶來的誤差多少及消除方法請參看文獻[8]。
2.3 三刀刃非共面性對物理天平測量誤差的影響[9]
在分析刀線與測量誤差的問題時,可以分為3種情況:連線、離線及吃線。
2.3.1 連線
在理想狀態下,天平的橫梁、刀子和刀承均是理想的剛體,刀刃線是幾何直線,刀承為一集合平面,三刀刃線相互平行且垂直于橫梁,三把刀口都在一條直線上,也就是說三刀刃完全位于同一理想的幾何平面,全秤感量和空秤感量一致,這樣托盤前后移動對測量結果沒有影響[10],如圖5所示。當天平水平時a=b,如果橫梁擺動一個角度以后a'=b',力臂仍然相等,測得結果準確。
2.3.2 離線
離線的定義是三刀口不在一條直線上,中間刀口在兩邊刀口連線上方。這樣會出現全秤感量低于空秤感量,如圖6所示。由圖6可知:當天平水平時a=b,AC=BD;如果橫梁擺動一個角度以后,就會出現a'
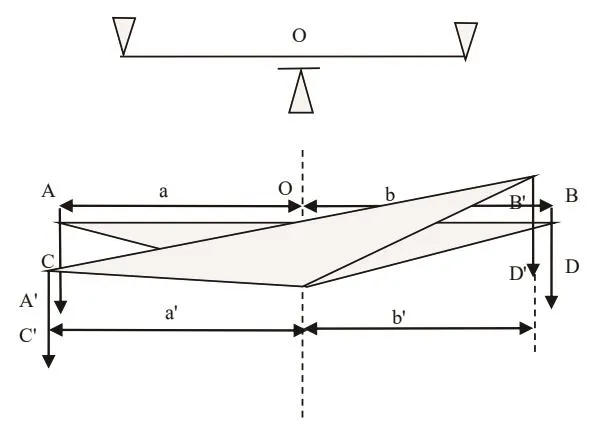
圖6 刀口離線及感量改變示意圖Fig.6 Schematic diagram of cutting edge off-line and sensitivity change
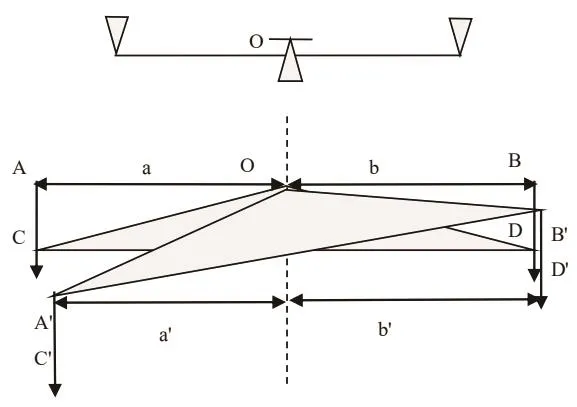
圖7 刀口吃線及感量改變示意圖Fig.7 Schematic diagram of cutting edge thread taking and sensory change
2.3.3 吃線
吃線的定義是三刀口不在一條直線上,中間刀口在兩邊刀口連線下方。這樣會出現空秤感量低于全秤感量,如圖7所示。由圖7可知:當天平水平時a=b,AC=BD;如果橫梁擺動一個角度以后,就會出現a'>b',A'C' 從杠桿平衡原理著手,對物理天平結構進行深入剖析,掌握了天平具體調節的要求和步驟,進而分析影響物理天平測量誤差的幾個因素,并通過實驗加以驗證,不僅使大家對物理天平有了深刻的認識,使用天平時更加得心應手,在規范的操作下使得測量誤差盡量縮小,提高了測量精度,而且使大家理論聯系實際、分析問題、解決問題的水平得到大幅度提高,大大增強綜合實踐創新這一能力。3 結束語