基于EPS系統傳感器角度信號的游標算法研究
2021-01-16 02:47:22宋昌平侯訓波孑L飛李峰郭力銘
汽車科技 2021年6期
宋昌平 侯訓波 孑L飛 李峰 郭力銘
摘要:EPS系統傳感器輸出的角度信號為PWM形式,可被ECU采樣識別,按基本算法來測量角度,將耗費大量ECU運算資源,影響運算效率。針對傳感器所輸出的角度信號開展研究,經分析信號特性、角差規律等,總結角度測量的游標算法和游標可信度的評價方法,其優勢較為明顯。以仿真驗證方式,發現當方向盤角速度較高時,游標算法所測量角度結果不可信,甚至錯誤。據此,提出附加角速度判斷條件,確定游標算法所測量角度結果是否有效,為另一種跟隨算法提供正確且有效的角度基準。
關鍵詞:EPS系統;角度傳感器;角度測量;游標算法;游標可信度;角速度
中圖分類號:U463.4 文獻標識碼:A 文章編號:1005-2550( 2021) 06-0061-07 Research of Vernier Algorithm Based on Sensor Angle Signal in
EPS System
SONG Chang-ping 1, HOU Xun_b0 2, KONG Fei 3, 11 Feng 4, GUO Li-ming 2 (1. Dalian Vocational Technical College, Dalian 116037, China; 2. Dalian Innovation PartsManufacturing Company, Dalian 116620, China; 3.Jiangxi ISUZU Motors Co.,Ltd. Nanchang
330103, China; 4. Foshan Factory Beiqi Foton Motor Co.,Ltd. Foshan 528137, China)
Abstract: The angle signal output by the sensor of EPS system is in the PWM form, whichcan be sampled and identified by ECU. To measure the angle according to the basic algorithmwill consume a lot of ECU computing resources and affect the computing efficiency. The anglesignal output by the sensor is studied. By analyzing the signal characteristics and the law ofangle difference, the vernier algorithm of angle measurement and the evaluation method ofthe vernier reserve are summarized, which have obvious advantages. It is found that when thesteering wheel angular velocity is high, the angle measured by the vermer algorithm is notcredible, or even wrong. On this basis, additional angular velocity judgment conditions areproposed to determine whether the angle measured by the vernier algorithm is valid or not,and to provide a correct and effective angle reference for another following algorithm.
Key Words: Electric Power Steering System(EPS); Angle Sensor; Angle Measurement;Vernier Algorithm; Vernier Reserve; Angular Velocity
1 前言
現代汽車配裝電動助力轉向系統(簡稱:EPS系統)已非常普及。角度傳感器作為EPS系統的核心部件之一,直接影響系統性能,其角度信號對于實現主動回正等功能又是必不可少的[1],甚至高端車輛的線控轉向系統采用了雙轉角傳感器[2-3],可見其重要程度。此外ESP等底盤電控系統也需要與EPS共享角度信號,實現底盤一體化控制,轉角傳感器也是關鍵[4]。目前EPS系統傳感器較多地采用了非接觸式,其輸出角度信號也采用了占空比PWM形式,具有較強抗干擾能力,被廣泛應用。鑒于此,本文針對Hella傳感器的角度信號,開展角度測量的算法研究,并分析游標算法的角差規律及游標可信度與角速度的關聯性。
2 傳感器工作原理和角度信號基本特性
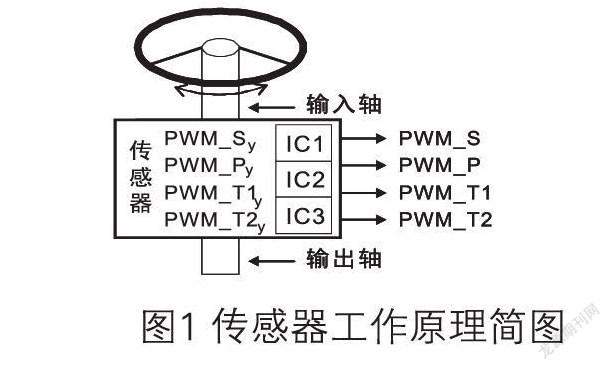
本文研究的EPS系統傳感器為Hella非接觸交變電磁感應式的扭矩轉角傳感器,如圖1所示,它除了能輸出扭矩主信號T1和副信號T2,還能輸出與角度相關的主信號P和副信號S,均為PWM占空比形式的信號,這些信號是經過傳感器內置IC計算處理后成為可用的信號,再傳輸到EPS系統控制器(簡稱ECU),參與系統工作[5]。其中PWM_Py/Sy/Tly/T2y是未經處理前的角度主信號/角度副信號,扭矩主信號/扭矩副信號,也是傳感器的原始信號,它們是由分別固連在輸入軸和輸出軸上的2個轉子,與PCB板上的預埋線圈和3個芯片配合產生的,當2個轉子隨輸入軸和輸出軸轉動時,由固定位置的預埋線圈可感應轉子角度變化。
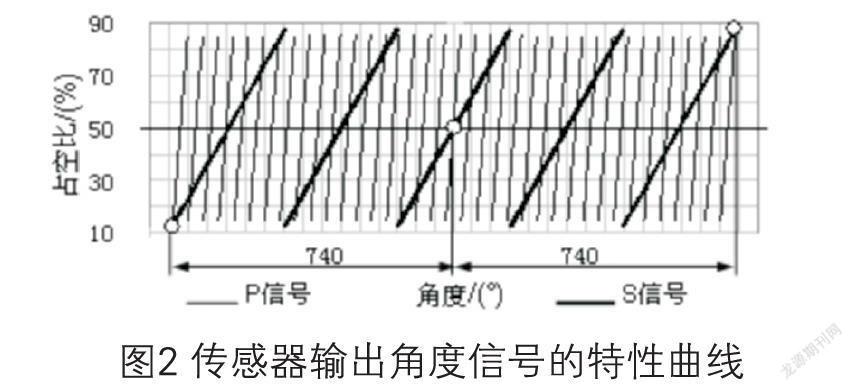
為使傳感器能準確且可靠地被EPS系統應用,來測量方向盤轉角,需對其原始角度信號進行標定。當不同傳感器被EPS系統裝配后,其原始角度信號的特性曲線的相對角位置關系是隨機被固定的,沒有統一基準,此時的原始角度信號若直接輸出,則是不可用的。經標定后,由傳感器內置IC建立虛擬的PWM_P和PWM—S信號與原始角度信號對應,此時輸出則為新構建的有統一基準的信號,其特性曲線如圖2所示[5]。其中PWM—P信號為40°一個循環,共37個周期,PWM__S信號為296°一個循環,共5個周期,綜合角度范圍為14800,且二種信號每個循環的有效PWM數值范圍均為12.5%-87.5%。
如圖2所示的特性曲線,可以理解為任意一段1480°角度范圍內的曲線,若將其首尾相連,則是循環重復的。在任何一段14800范圍內,若劃分0-1480°角度刻度,則任意角度點均存在唯一的P信號值PWM—P和S信號值PWM—S組合與其對應,即可表示為θ=f(PWM▁P,PWM_S),若超出了14800范圍,則會出現重復信號組合。因此,ECU通過相應算法所識別的角度為相對角度,僅在1480°范圍內有效。
3 角度測量的基本算法
角度測量是由ECU對傳感器輸出信號進行采樣,并將采樣值PWM_P和PWM_S按相應算法計算,獲得角度值的過程。
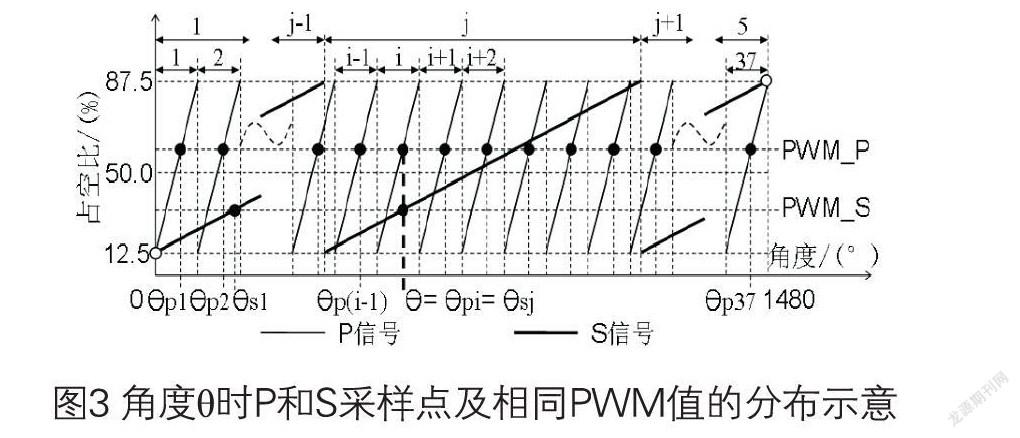
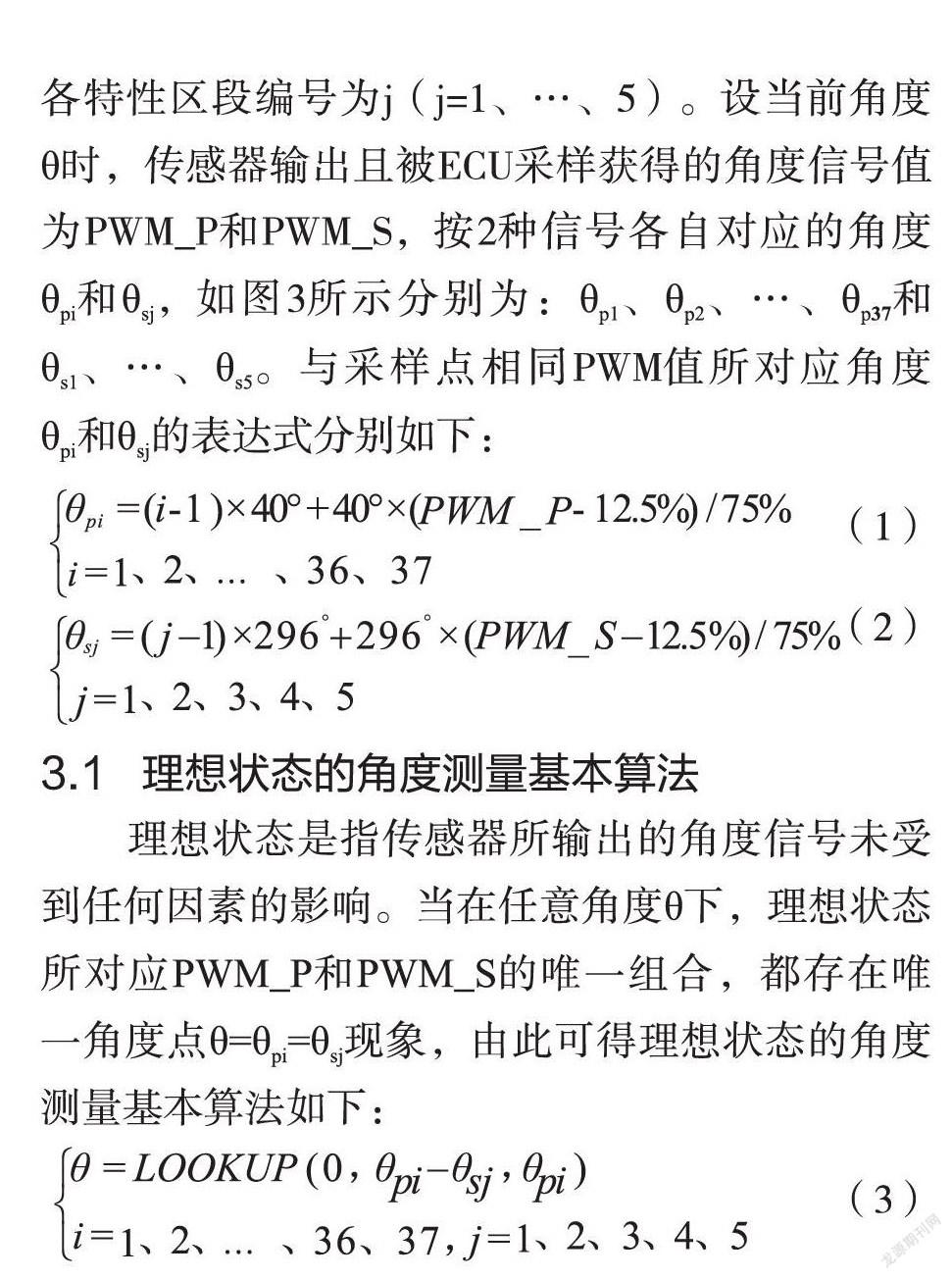
如圖2所示,將PWM_P=PWM_S=12.5%特征點作為基準零點,向右1480°范圍內展開,又將P信號各特性區段編號為i( i=l、2、…、37),S信號各特性區段編號為j (j=l、…、5)。設當前角度O時,傳感器輸出且被ECU采樣獲得的角度信號值為PWM—P和PWM—S,按2種信號各自對應的角度θpi,和θsj,如圖3所示分別為:θp1、θp2…θp37和θs1、…、θR5。與采樣點相同PWM值所對應角度θp1,和θsj的表達式分別如下:θpi=(i-l)×40°+40°×(PWM_P- 12.5%) /75%(1)i=l、2、…、36、37θsj=(j-1)×296°+296°×(PWM_ S-12.5%)/75%(2)j=l、2、3、4、5
3.1 理想狀態的角度測量基本算法
理想狀態是指傳感器所輸出的角度信號未受到任何因素的影響。當在任意角度θ下,理想狀態所對應PWM_P和PWM_S的唯一組合,都存在唯一角度點θ=θpi=θsj現象,由此可得理想狀態的角度測量基本算法如下:θ=LOOKUP(0,θpi - θsj,θpi)(3)i=1、2、.,、36、37,j=1、2、3、4、5
3.2 實際狀態的角度測量基本算法
實際狀態是指傳感器所輸出的角度信號受到一些因素的影響,將產生信號采樣誤差。如:傳感器內置磁性小齒輪的嚙合存在間隙,其它機械匹配件之間也存在間隙,甚至振動以及采樣電路等因素都會造成信號采樣誤差。為盡量降低這些誤差對角度測量有效性的影響,需將PWM—P和PWM—S的誤差分別對待。由于P信號受影響因素較少,以此為角度測量算法的基礎,可增強測量準確度,這樣PWM_P誤差將成為實際狀態的角度測量精度的主要影響因素;而由于S信號受影響因素較多,在實際狀態下的角度測量算法中,作為輔助信號僅被過渡計算所采用,來判斷置信區間范圍,依此來評價可信度(又稱:游標可信度)Vres(Vemier reserve)。
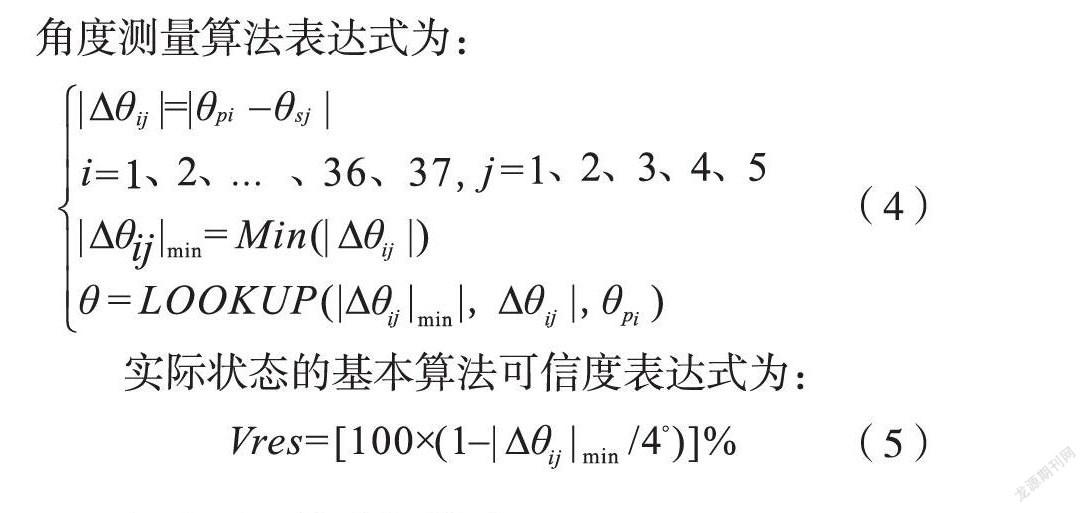
根據以上描述,以示例方式來展示其中規律,將歸納出實際狀態的角度測量基本算法。例如:當前角度仍為O=385°時,在實際狀態下仍有PWM—P=59.375%采樣值,而S信號采樣值,為模擬實際狀態,則刻意按一系列偏差給出,其每組組合后仍分別由ECU按式(1)和式(2)計算角度θpi和θsj對應值,設△θij=θpi一θsj,再計算并搜尋其中I△θij|最小值:|△θij|min,以及與|△θij|min對應的△θij值:Aθij-m°由此可發現一個規律:當PWM—P=59.375%時,為能準確獲得θ=385°計算值,需保證PWM_S=35.051±1.014%內,即θsj= 385±4°,此時角度偏差值4°就成為S信號所允許最大偏差角度,這也是對傳感器輸出S信號所有因素引起的總偏差要求。該規律適用于任何PWM—P采樣值時,所對應理想狀態下PWM—S值,其偏差符合±1.014%時,就可認為θ=θpi.是可信的,依此,實際狀態的角度測量算法表達式為:
實際狀態的基本算法可信度表達式為:
Vres=[100×(1-l△θij|min/4°)]%
(5)
4 角度測量的游標算法
在角度測量基本算法中,需ECU實時對傳感器角度信號采樣,來計算角度θpi,和θsj共185個對應值,同時還要統計I△θij-|θpi-θsj|最小值|△θij|min,并搜尋對應|△θij|min的θpi值,來確定當前被測量角度。該算法過程將耗費ECU大量的運算資源,會影響效率,甚至影響正常工作。因此,角度測量游標算法是經改進并簡化后的算法,較適于被推廣應用。
4.1 角差規律分析
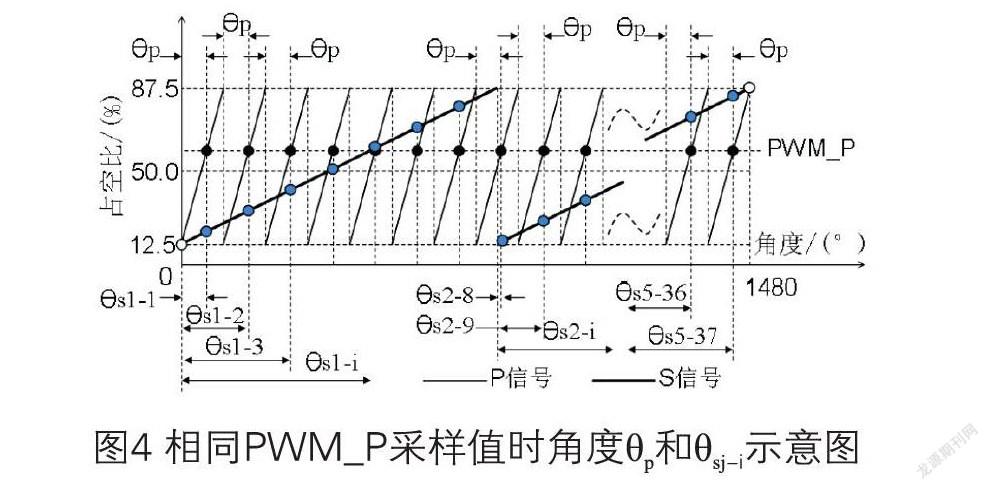
當檢測到的角度差值與標準角度差值,存在一一對應關系時,就符合游標算法原理[6]。設當前角度θ值對應角度信號采樣值為:PWM_P和PWM—S,其中PWM—P采樣值在37個區段中,對應同角位置上的S信號點定義為Sj-i,同時Sj-i信號點所在j區段的PWM_S=12.5%點距該Sj-i信號點角度定義為θsji;定義PWM_P采樣點距i區段PWM-P=12.5%點的角度為θp,在各P信號區段中角度θp均相同,
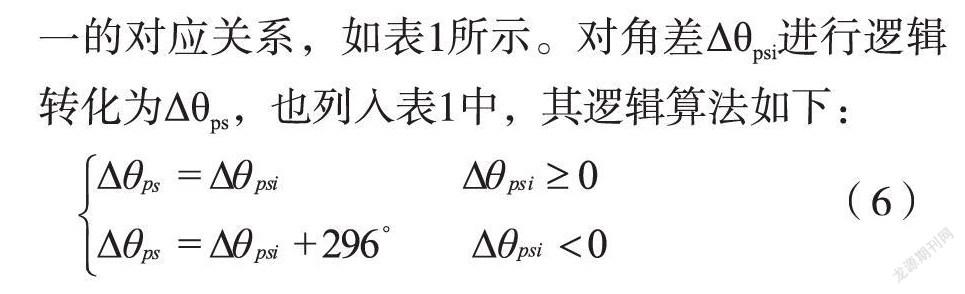
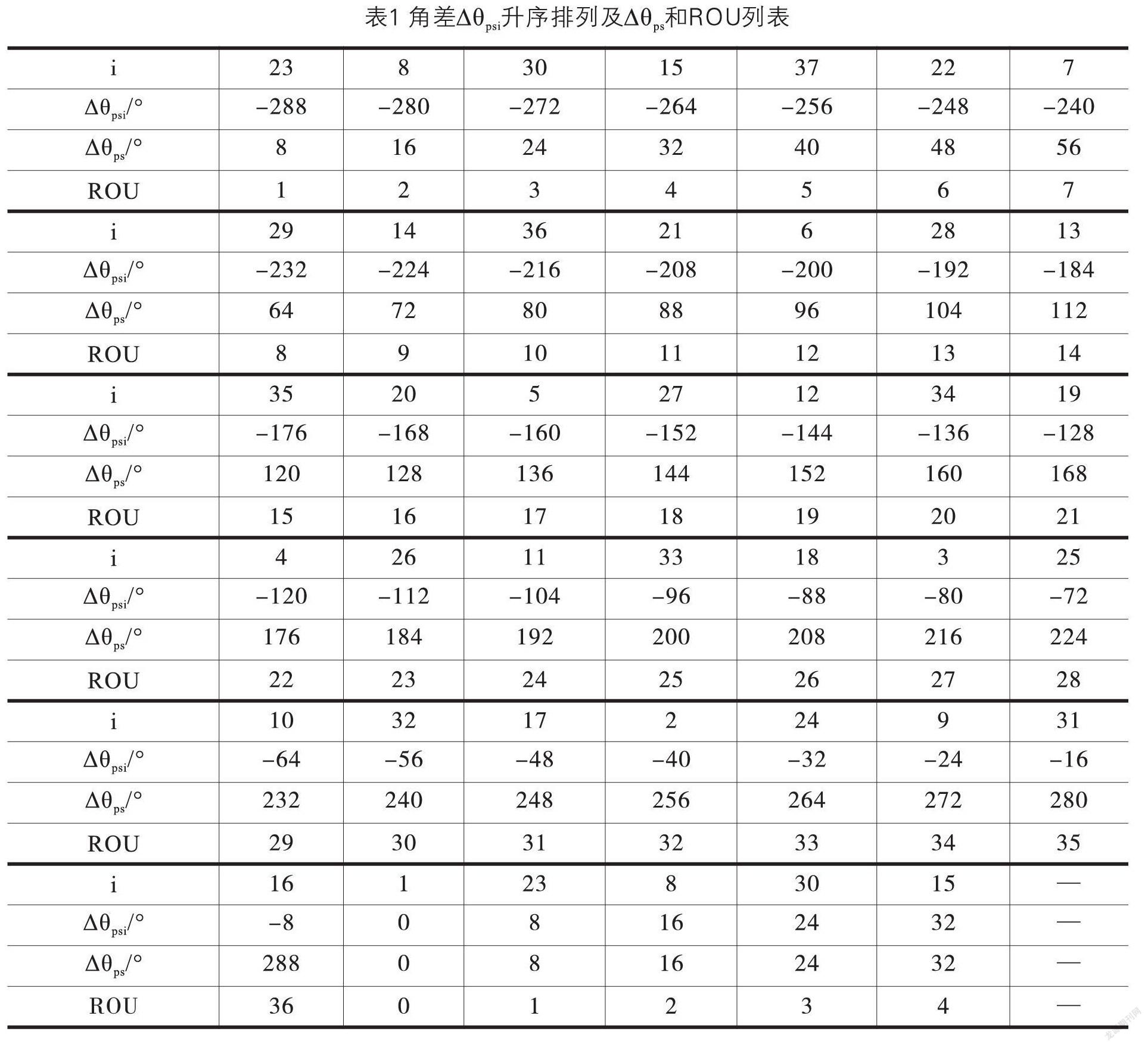
設角差△θpsi=θp一θsj-i,根據圖4所示的規律,可列出37個i與△θpsi數組,再將角差△θpsi按升序排列,所對應的P信號區段編號i也隨之對應。由此可以發現,在編號i=8、15、23、30四個P信號區段中,每段都會出現S信號循環切換現象,使△θpsi出現二種不同角差值,其它編號中的角差值是恒定的;還發現:將在編號i=8、15、23、30所對應角差值中負值,分別加上S信號周期角度2960后,四段編號中的角差值就統一了,依此方法將所有角差等效轉化,即可使轉化后角差值與編號i形成唯一的對應關系,如表1所示。對角差△θpsi進行邏輯轉化為△θps,也列入表1中,其邏輯算法如下:
(6)
對表1中△θps觀察發現,每間隔80就變換新編號i值。若將△θps實際值對比表中最接近的標準值,并全部歸屬于該標準值上,則使實際值具有明確的歸屬性且是唯一的。依此思路,將△θps值除以80后,四舍五入取整處理,即可達到上述目的。取整數代號定義為ROU,其結果列入表1中,ROU表達式為:
ROU=ROUND(△θps/8°,0)
(7)
從表1中還可以看出,P信號區段編號i與角差轉化后取整數ROU,具備由ROU—i的唯一對應關系,并且取整數ROU還具備±40偏差的融合能力。如:實際狀態下的S信號可能存在一定偏差,會引起△θpsi,和△θps產生同量偏差,這些偏差均被控制在±4°之內,最終再被取整處理后,都歸屬于表1中的標準ROU整數。
4.2 角度測量游標算法
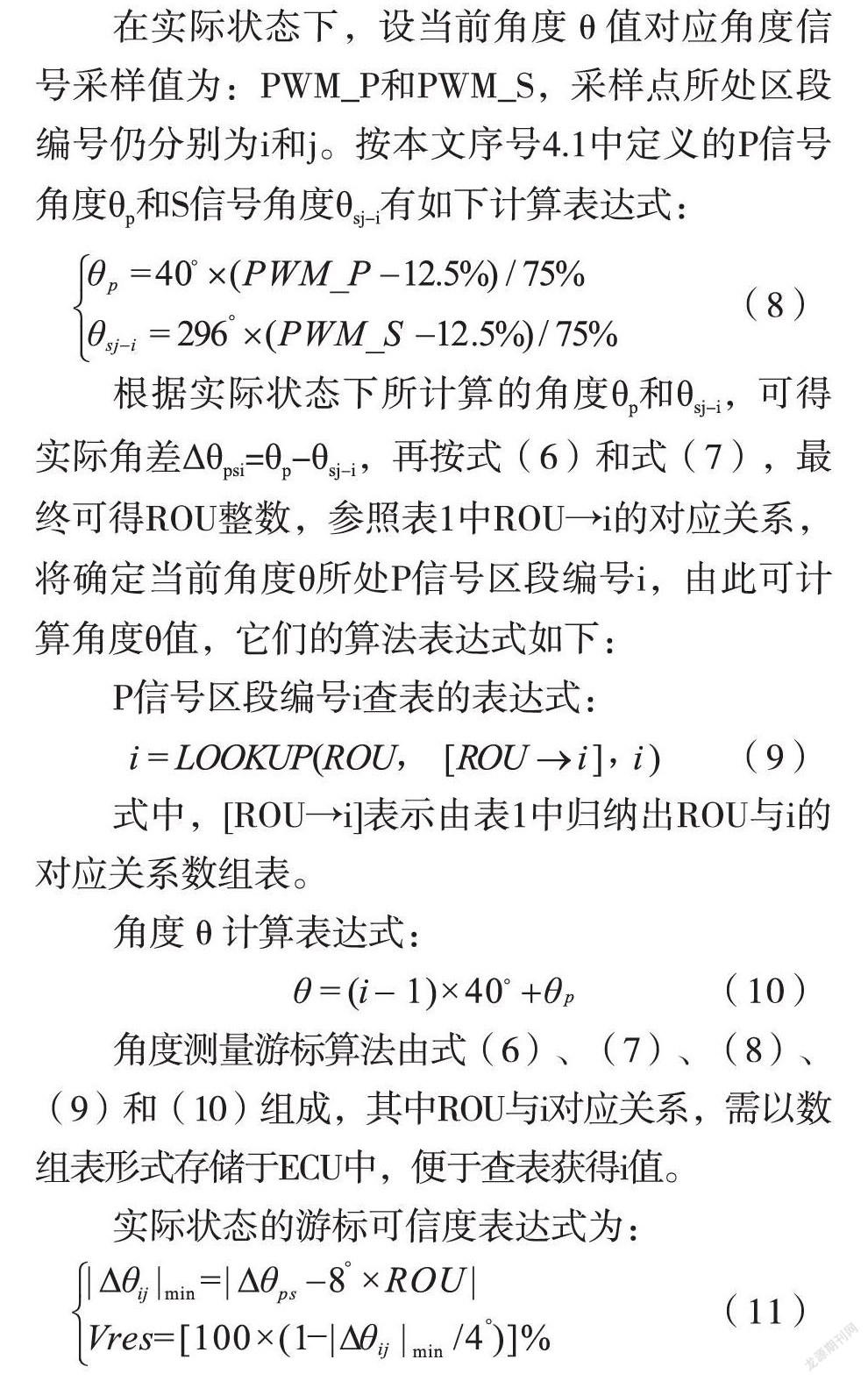
在實際狀態下,設當前角度θ值對應角度信號采樣值為:PWM_P和PWM_S,采樣點所處區段編號仍分別為i和j。按本文序號4.1中定義的P信號角度θp和S信號角度θsj-i.有如下計算表達式:
根據實際狀態下所計算的角度θp和θsj-i,可得實際角差△θpsi=θp-θsj-i再按式(6)和式(7),最終可得ROU整數,參照表1中ROU→i的對應關系,將確定當前角度θ所處P信號區段編號i,由此可計算角度e值,它們的算法表達式如下:
P信號區段編號i查表的表達式:
i=LOOKUP(ROU,[ROU→i],i)
(9)
式中,[ROU—i]表示由表1中歸納出ROU與i的對應關系數組表。
角度θ計算表達式:
θ=(i-1)×4°+θp
(10)
角度測量游標算法由式(6)、(7)、(8)、(9)和(10)組成,其中ROU與對應關系,需以數組表形式存儲于ECU中,便于查表獲得i值。
實際狀態的游標可信度表達式為:
(11)
5 算法驗證及改進
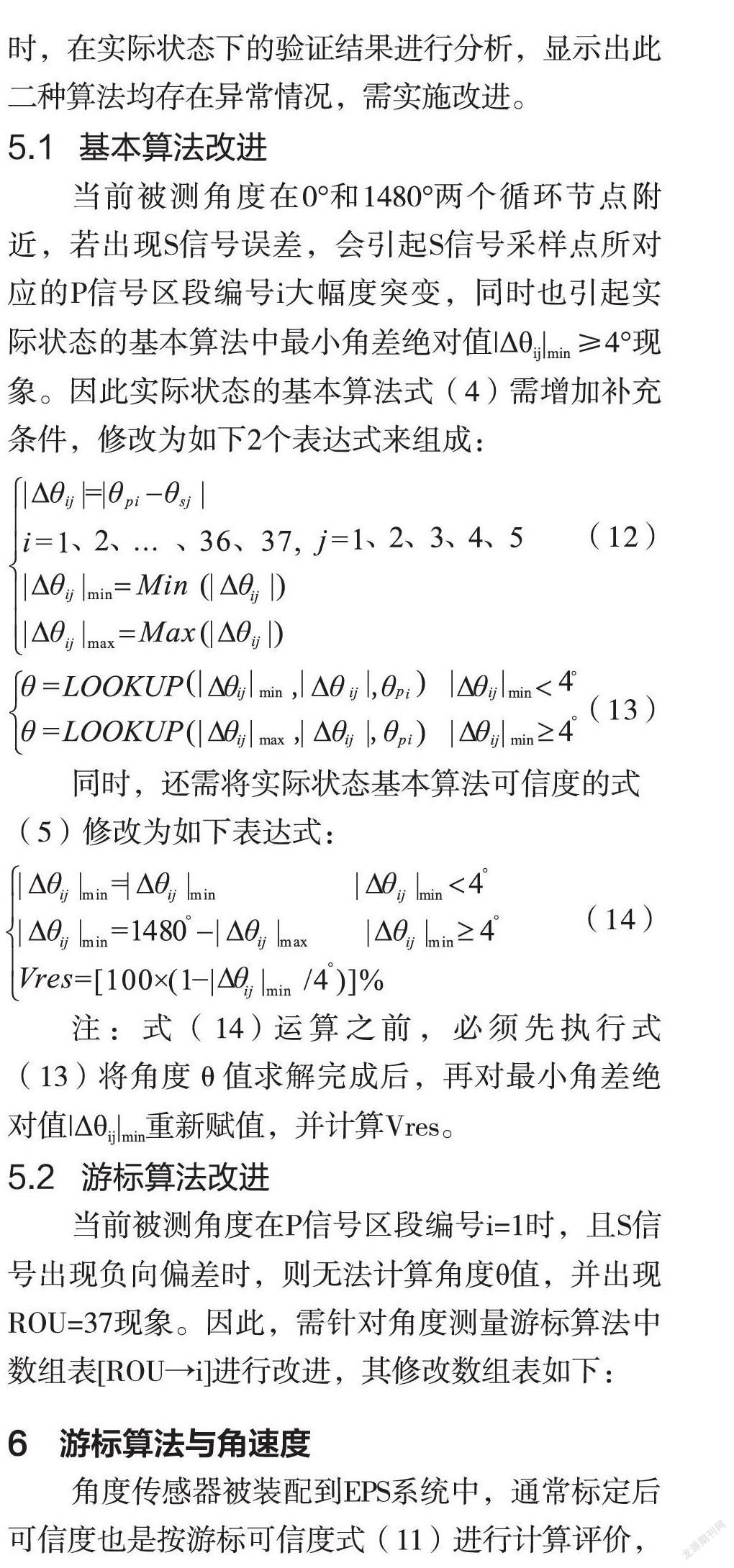
經驗證,在理想狀態下,角度測量的游標算法與基本算法所得結果完全吻合。而在在實際狀態下,當被測角度處于i編號為1、8、15、23、30、37這些特殊區段之外時,經驗證兩種算法所得結果也完全吻合。針對被測角度處于典型的特殊區段時,在實際狀態下的驗證結果進行分析,顯示出此二種算法均存在異常情況,需實施改進。
5.1 基本算法改進
當前被測角度在0°和1480°兩個循環節點附近,若出現S信號誤差,會引起S信號采樣點所對應的P信號區段編號i大幅度突變,同時也引起實際狀態的基本算法中最小角差絕對值|△θij|min≥4°現象。因此實際狀態的基本算法式(4)需增加補充條件,修改為如下2個表達式來組成:
(13)
同時,還需將實際狀態基本算法可信度的式(5)修改為如下表達式:
注:式(14)運算之前,必須先執行式(13)將角度θ值求解完成后,再對最小角差絕對值I△θij|min重新賦值,并計算Vres。
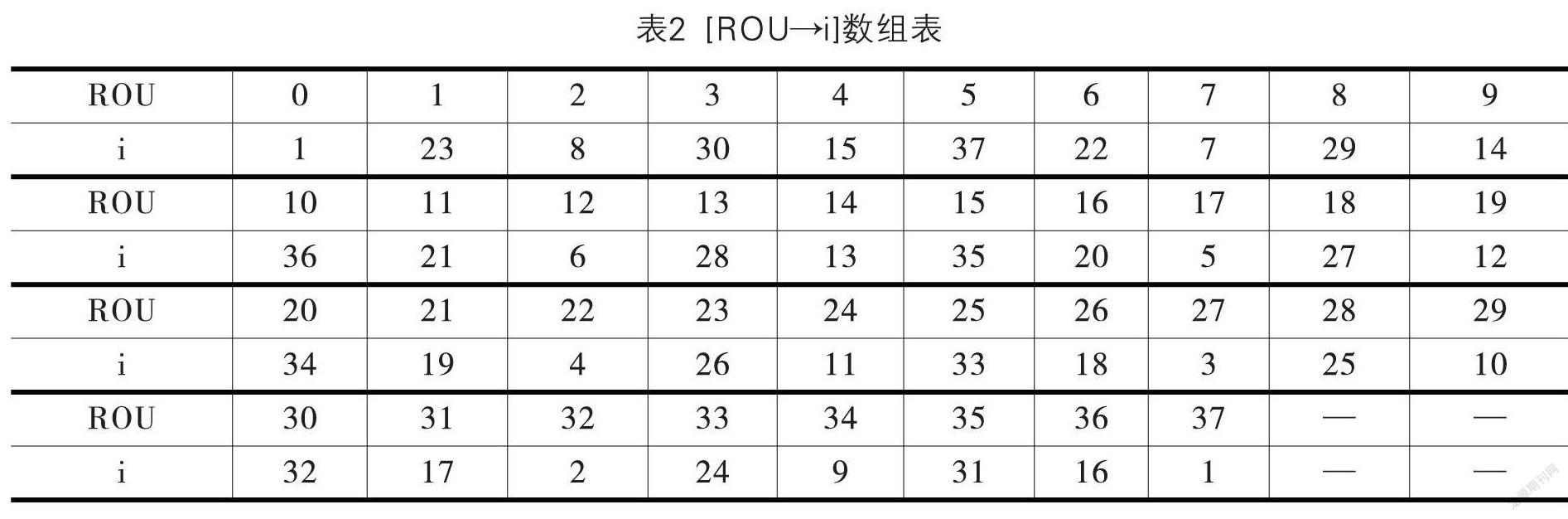
5.2 游標算法改進
當前被測角度在P信號區段編號i=1時,且S信號出現負向偏差時,則無法計算角度O值,并出現ROU=37現象。因此,需針對角度測量游標算法中數組表[ROU→i]進行改進,其修改數組表如下:
6 游標算法與角速度
角度傳感器被裝配到EPS系統中,通常標定后可信度也是按游標可信度式(11)進行計算評價,在實際產品靜態檢測中,通常Vres都達到了62.5%以上,說明S信號角度偏差均可控制在±1.50范圍內。P信號代表角度測量精度,通常PWM_-P靜態偏差為±0.03%,影響角度測量的靜態精度為:±0.016°。
以上指標均在靜態下進行評價,當EPS系統執行轉向動作時,必然使傳感器角度信號處于動態中,特別是方向盤轉動角速度,對游標算法可信度Vres和角度測量精度的指標,將產生極大影響。
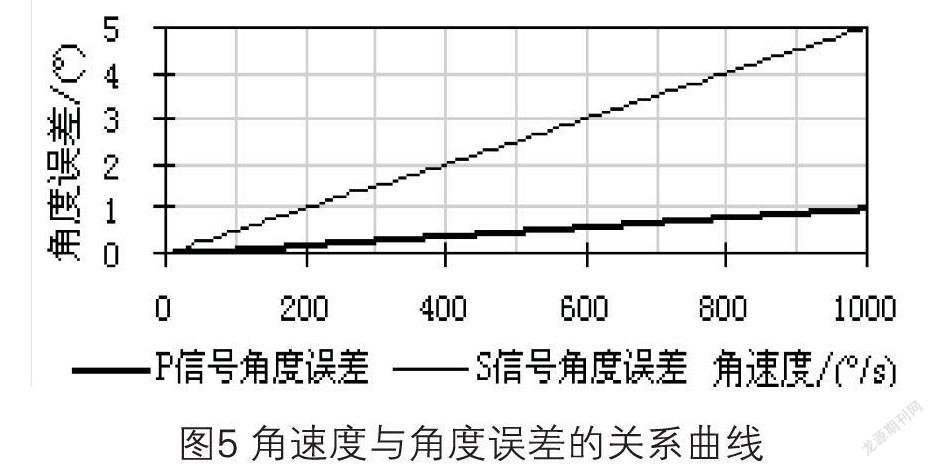
由于P信號頻率為IOOOHz,S信號頻率為200Hz,它們的信號周期不同。因此,當方向盤快速轉動,在他們各自的信號周期內將產生角度誤差,而不被角度信號所反映,其動態角度誤差與角速度關系如圖5所示:
對方向盤操作,人力極限轉角速度為10000/s,按圖5所示,P信號角度誤差為±1°,S信號為±5°。因此,選定P信號為主角度信號進行游標算法角度測量,是較可靠的,其角度測量的動態精度為±1°。
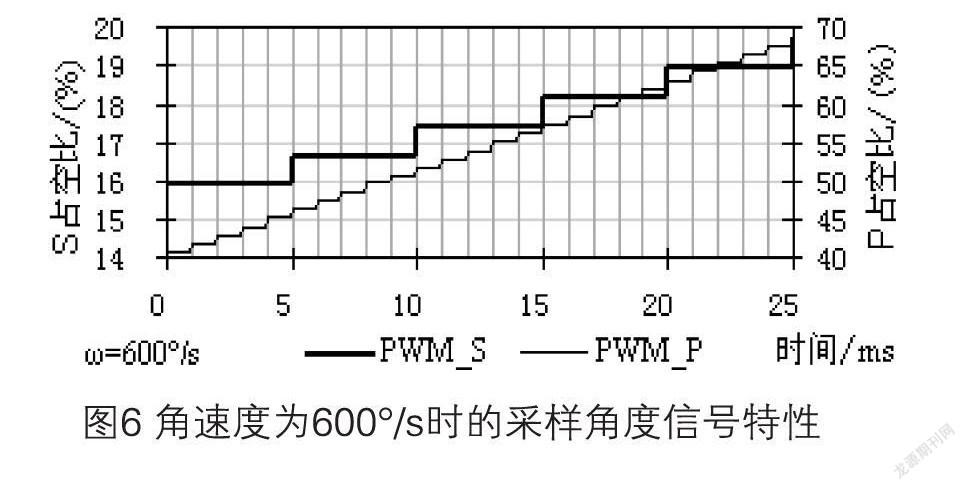
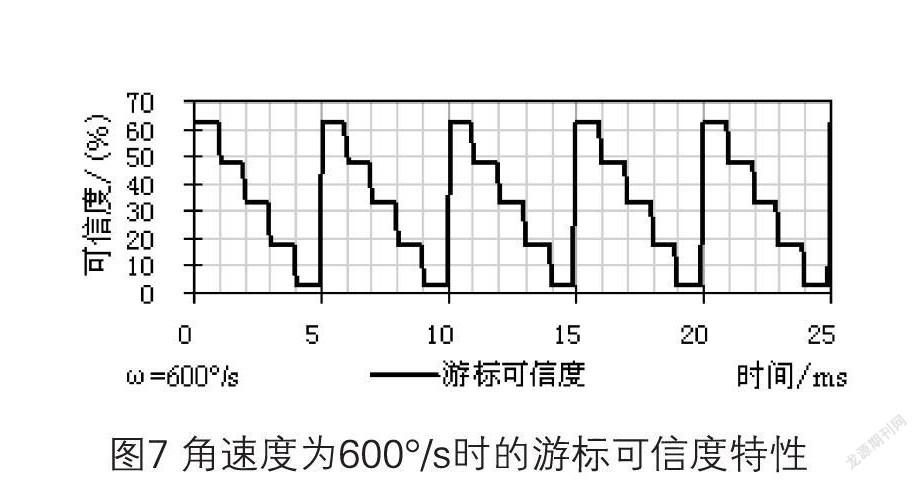
角度測量是根據1ms為周期的采樣值:PWM_P和PWM—S,再通過游標算法來獲得測量角度,但由于二種信號頻率不同,其中P信號每更新5次,S信號才更新1次,這樣就會引起可信度Vres降低,甚至出現角度測量錯誤。通常普通人轉動方向盤的角速度極限為800°/s,當駕駛車輛時,受安全意識壓力,一般不會超出600°/s,以此為例,利用可信度來分析角速度對游標算法的影響,如圖
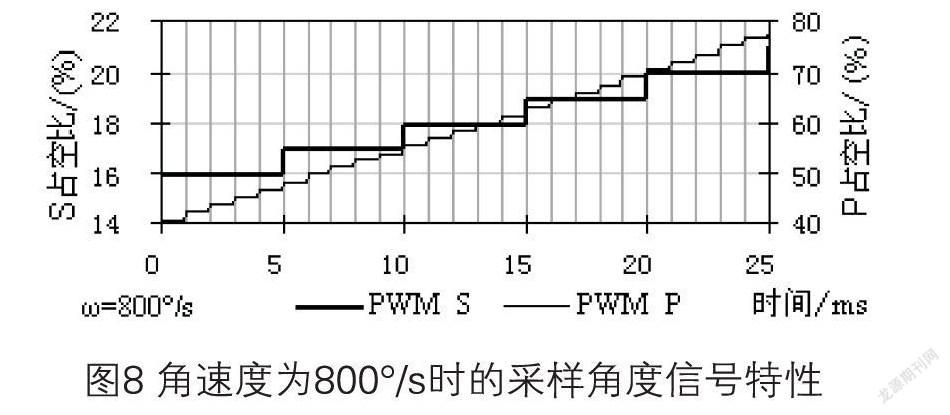
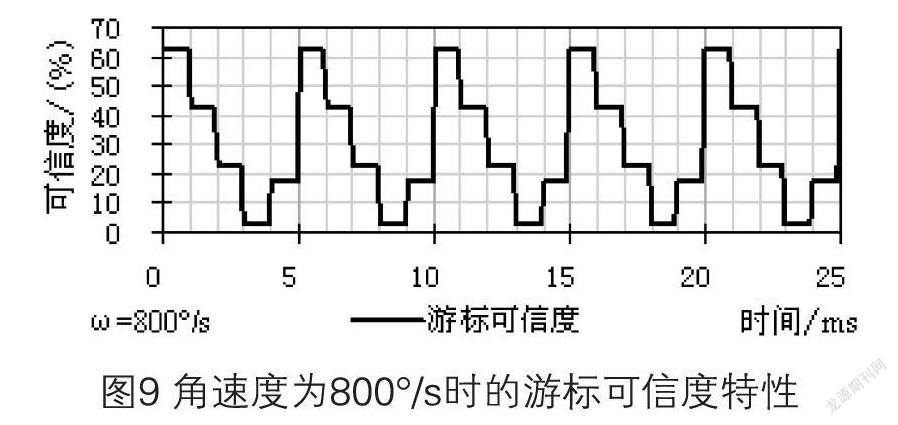
如圖8和圖9所示,可以看出,當角速度為800°/s時,游標算法的測量角度結果是不可信的,若角速度再提高,則會更頻繁地出現測量角度與實際角度不符,可信度Vres出現降至0%再提升的現象,這些測量結果均不可信。
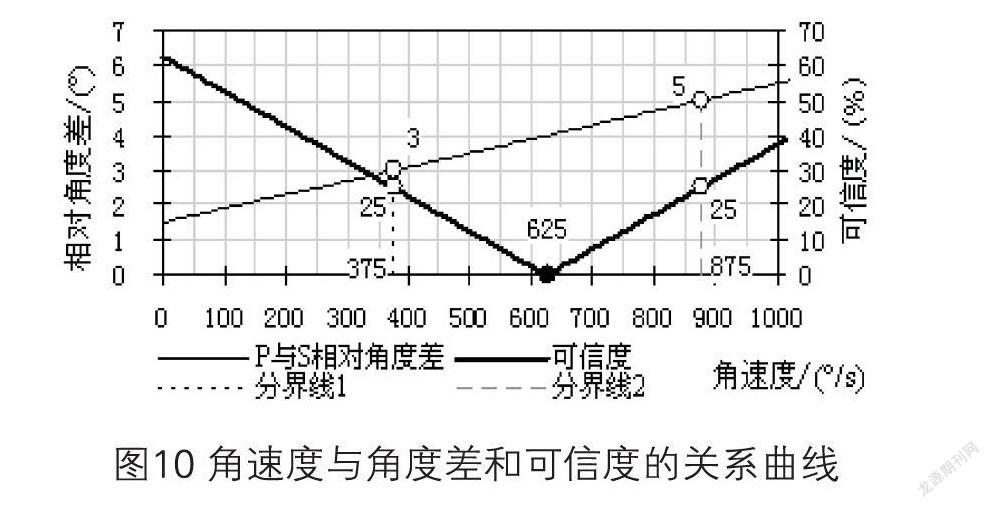
如圖6和圖7所示,當角速度為600°/s時,未出現上述錯誤,其角度測量結果與實際角度是基本吻合的,但可信度下降至2.50%,也有一定的測量風險。當角速度較高時,也就相當于采樣時刻的P信號和S信號有機會產生較大的相對角度誤差,如圖10所示,由此引起角度誤差超過了臨界極限時,計算所輸出的角度就變得不穩定[7]。在EPS系統實際工作中,需設定可信度Vres≥25%最低限值,符合該限值要求的角度測量結果才允許被ECU應用,否則本次測量結果將被禁用。
如圖10所示,在傳感器角度信號已存在最大靜態P和S相對角度誤差1.5°及當前可信度Vres=62.5%的情況下,隨著方向盤轉動角速度的提高,會出現以下三種情況。第一種:當角速度小于375°/s時,Vres均大于25%,所測量角度是可信的,可被ECU應用;第二種:當角速度大于3750/s而小于8750/s時,Vres均小于25%,所測量角度是不可信的,將被ECU禁用;第三種:當角速度大于875°/s時,Vres也大于25%,但所測量角度是錯誤的,也將被ECU禁用。
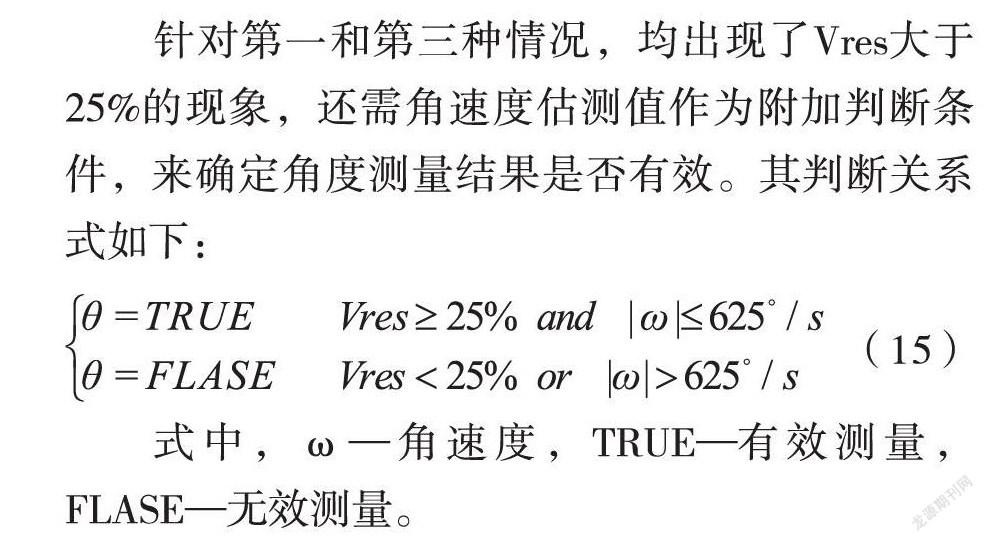
針對第一和第三種情況,均出現了Vres大于25%的現象,還需角速度估測值作為附加判斷條件,來確定角度測量結果是否有效。其判斷關系式如下:
式中,w一角速度,TRUE-有效測量,FLASE-無效測量。
當游標算法所測量角度由式( 15)判斷為無效時,不能被EPS系統應用,將由另一種跟隨算法所測量角度來提供,兩種算法需配合使用。跟隨算法是根據游標算法所確定的角度基準,以獨立P信號采樣值進行增量式的角度測量[8],避免了角速度對測量的影響,同時也可擴展角度測量范圍。
7 結束語
游標算法是利用EPS系統傳感器角度信號,通過ECU對相對轉向角度進行測量的一種方法,僅在0-1480°范圍內有效。當方向盤角速度較高時,游標算法會出現角度測量錯誤,將引起EPS系統回正等功能被錯誤啟動,而造成轉向不平順現象。本文提出了在游標算法中附加角速度條件,來確定所測量角度是否有效。在EPS系統實際應用中,因游標算法存在上述不足,需與另一種跟隨算法配合使用。
參考文獻:
[1]那少聃.用于EPS的非接觸電磁感應式角度傳感器研究[D].哈爾濱:東北林業大學,2015: 1-5.
[2]何磊,馬伯祥,宗長富,線控轉向汽車轉向盤轉角傳感器的容錯控制策略[J]汽車工程,2015,37(3):327-330+345.
[3]陳俐,李雄,程小宣,等,汽車線控轉向系統研究進展綜述U].汽車技術,2018(7):23-34.
[4]楊財,周艷霞,方向盤轉角傳感器研究進展[J]傳感器與微系統,2007( 11):1-4.
[5]宋昌平,侯訓波,劉曉文,等.EPS系統傳感器角度信號靜態標定及算法解析[J]汽車零部件,2021( 5):13-19.
[6]牛勃.非接觸式方向盤轉角檢測算法的研究[D].哈爾濱:哈爾濱工業大學2015: 22-25.
[7]羅蘭.蓋邁希,基于游標原理的轉向角度傳感器運行期穩定性監測:中國,201880088362.7[P].2018-02-02:1-10.
[8]侯訓波.基于傳感器P信號實現EPS補償控制策略和算法[J].汽車工程師,2020( 6):39-43.
專家推薦語
王坤
東風汽車集團技術中心
整車技術部副總工程師 高級工程師
本論文對基于EPS系統傳感器角度信號的游標算法進行了詳細的解析性研究,對單一的游標算法的特征和缺點進行了闡述,提出了需要追加組合算法的方案,并對組合算法的方案進行了分析扣闡述,提升了算法的容錯率。本文的方法和思路對于自主開發的控制器傳感器的信號處理提供了參考和借鑒,具有實用性和借鑒價值,有公開發表的價值。