基于EMD 與BP 神經(jīng)網(wǎng)絡(luò)的齒輪故障診斷
2021-01-21 06:22:10劉劍生王細(xì)洋
失效分析與預(yù)防 2020年6期
劉劍生 , 王細(xì)洋
(南昌航空大學(xué) 通航學(xué)院,南昌 330063)
0 引言
齒輪是機(jī)械設(shè)備中最常見的機(jī)械傳動零件,它擁有結(jié)構(gòu)緊湊、效率高、壽命長等優(yōu)點,因此廣泛應(yīng)用于機(jī)械傳動中。同時,由于工作在高速、重載等惡劣環(huán)境下,齒輪發(fā)生故障的概率大大增加。齒輪一旦出現(xiàn)故障,還會誘發(fā)其他機(jī)械零件故障,造成巨大的損失,甚至導(dǎo)致人員傷亡;因此,對齒輪故障診斷的研究至關(guān)重要。
近年來,由于BP 神經(jīng)網(wǎng)絡(luò)具有較強(qiáng)的模式識別能力、高度的自學(xué)習(xí)和自適應(yīng)的能力,一些專家學(xué)者已經(jīng)將其應(yīng)用到齒輪的故障診斷中,并且取得了一定的成果。王勇[1]、閆君杰[2]等通過計算故障信號的均值、峰值、峭度和裕度等特征指標(biāo),再將特征指標(biāo)歸一化后作為BP 神經(jīng)網(wǎng)絡(luò)的輸入,達(dá)到了對齒輪故障分類的效果,但是采用單一的BP 神經(jīng)網(wǎng)絡(luò)對齒輪故障進(jìn)行分類,誤差較大,網(wǎng)絡(luò)訓(xùn)練速度慢。龍泉等[3]采用粒子群優(yōu)化BP 神經(jīng)網(wǎng)絡(luò)方法減少了該算法易陷入局部最優(yōu)解的風(fēng)險,加快了網(wǎng)絡(luò)收斂速度,提高了效率。但是對于信號的預(yù)處理方面尚有欠缺。此外,陳學(xué)峰等[4]提出了雙譜?BP 神經(jīng)網(wǎng)絡(luò)的故障診斷方法,并以雙譜為BP 神經(jīng)網(wǎng)絡(luò)的輸入特征向量對齒輪進(jìn)行故障模式識別,該方法有一定的分類效果,但是其過程過于繁瑣,網(wǎng)絡(luò)的訓(xùn)練速度以及準(zhǔn)確率并不理想。
針對上述問題,本研究采用EMD 與BP 神經(jīng)網(wǎng)絡(luò)相結(jié)合的方法對齒輪故障進(jìn)行分類。使用EMD 方法對采集到的非平穩(wěn)信號進(jìn)行處理,提取出故障信號的若干IMF 分量,此時能夠?qū)π盘栠M(jìn)行比較直觀地分析。對分解出的各個IMF 分量的能量進(jìn)行計算,區(qū)分各類故障齒輪中各個分量的能量分布特點。這些由能量組成特征向量是神經(jīng)網(wǎng)絡(luò)訓(xùn)練的有效依據(jù)。將這些特征向量作為BP神經(jīng)網(wǎng)絡(luò)的輸入也較為合理;因此,采用EMD 與BP 神經(jīng)網(wǎng)絡(luò)相結(jié)合的方法以減小訓(xùn)練誤差和提高網(wǎng)絡(luò)訓(xùn)練速度。
1 EMD 與BP 神經(jīng)網(wǎng)絡(luò)基本原理
1.1 EMD 基本原理
EMD 是20 世紀(jì)90 年代Huang 等[5]提出的一種對非平穩(wěn)信號的處理方法,可將信號分解成平穩(wěn)的若干本征模式分量(IMF 分量)以及剩余分量。在時域信號中,以不同時間尺度為基準(zhǔn),分解出若干個本征模式函數(shù)IMF,其分解出的IMF 分量包含原始數(shù)據(jù)不同時間段的局部特征。其分解步驟如下所示:
1)從初始信號x(t)中取出其所有局部極大值點,在這些局部極大值點都大于相應(yīng)x(t)中的點前提下,將這些極大值點用3 次樣條曲線依次連接,得到極大值樣條曲線l(t)。然后以同樣的方法得到x(t)的極小值樣條曲線s(t)。取2 個樣條曲線的均值序列m(t):

2)在原始信號x(t)中,減去上、下2 個樣條曲線的均值序列m(t),得到:

以基本模式分量的2 個條件為標(biāo)準(zhǔn),判斷所得到的p(t)是否同時滿足該條件。如果不滿足,則將p(t)當(dāng)做初始信號x(t),重復(fù)步驟1、2 的操作,直至p(t)是一個基本模式分量,記為:

3)記剩余值序列為r1(t),則:

4)將r1(t)當(dāng)做初始信號x(t),重復(fù)步驟1~3 的操作,可得到n 個基本模式分量c1(t),c2(t),…,cn(t),最后剩下原始信號的余項rn(t)。此篩選過程設(shè)定停止準(zhǔn)則,最后初始信號x(t)被分解為若干基本模式分量ci(t)和一個剩余項rn(t),即:
1.2 BP 神經(jīng)網(wǎng)絡(luò)基本原理
BP 神經(jīng)網(wǎng)絡(luò)算法包括2 個步驟[6]:信號的前向傳播和誤差反向傳播。按結(jié)構(gòu)劃分,又分為輸入層、隱含層和輸出層。其中輸入層和隱含層、隱含層和輸出層之間采用全連接方式連接。隱含層可以有一層或多層。
1)信號的前向傳播。
隱含層第i 個節(jié)點輸出oi為:

其中:wi,j為連接隱含層中第i 個節(jié)點與輸入層中第j 個節(jié)點的權(quán)值;xj表示輸入層第j 個節(jié)點的輸入,j=1,…,M;ai為隱含層第i 個節(jié)點的閾值;ni為隱含層第i 個節(jié)點的輸入;f 為隱含層激活函數(shù)。
輸出層第k 個節(jié)點的輸出ok為:

其中:wk,i為連接輸出層中第k 個節(jié)點與隱含層中第i 個節(jié)點的權(quán)值,i=1,…,q;bk為輸出層第k 個節(jié)點的閾值;nk為輸出層第k 個節(jié)點的輸入;g 為輸出層激活函數(shù)。
2)先由輸出層的結(jié)果開始計算其與實際值之間的誤差,再以此為結(jié)果計算各層神經(jīng)元的誤差。然后通過這些誤差,根據(jù)梯度下降法來更新連接輸入層、隱含層、輸出層之間權(quán)值和閾值。
設(shè)定計算誤差的準(zhǔn)則函數(shù)Ep為:
根據(jù)梯度下降法依次更新輸入層、輸出層、隱含層的權(quán)值修正量和閾值修正量:

其中:Δwki為輸出層權(quán)值修正量;Δbk為輸出層閾值修正量;Δwij為隱含層權(quán)值修正量;Δai為隱含層閾值修正量;為預(yù)設(shè)輸出值;η 為學(xué)習(xí)率;yi為輸出層第i 個節(jié)點的值;為實際輸出值。
2 基于EMD 和BP 神經(jīng)網(wǎng)絡(luò)的故障診斷方法
2.1 EMD 方法特征量提取
根據(jù)EMD 方法對故障信號分解出的IMF 分量進(jìn)行分析,選取每個信號分解所得的前8 個分量。
分別求取前8 個分量的能量[7]:

計算信號的總能量:

構(gòu)造歸一化后的能量特征向量:

2.2 BP 神經(jīng)網(wǎng)絡(luò)建模
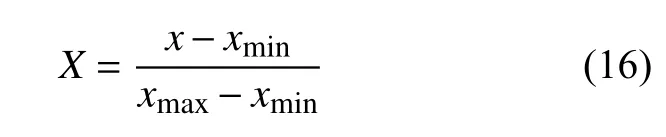
1)數(shù)據(jù)歸一化。盡管得出的能量特征向量已經(jīng)是歸一化后的值,但為了使特征指標(biāo)的數(shù)值都處于[0,1],還需對其進(jìn)行歸一化操作,歸一化公式為:
2)確定神經(jīng)網(wǎng)絡(luò)隱含層和輸出層節(jié)點數(shù)。EMD 方法所提取出的特征向量為8 維,因此,構(gòu)建的 BP 神經(jīng)網(wǎng)絡(luò)的輸入層為X1~X8 的8 個特征指標(biāo),即輸入層神經(jīng)元數(shù)目為8;輸出層節(jié)點數(shù)的選擇是以模型識別模式的數(shù)量為依據(jù),根據(jù)實驗要求,本研究有4 種工作狀態(tài)的齒輪,分別為正常、缺齒、齒根裂紋和齒面磨損,因此確定輸出層神經(jīng)元數(shù)目為 4。
定義神經(jīng)網(wǎng)絡(luò)的輸出值為四維向量,對輸出向量進(jìn)行編碼,如表1 所示。
計算神經(jīng)網(wǎng)絡(luò)隱含層節(jié)點數(shù)目[8-10]:

其中:m 為輸入層節(jié)點數(shù),m=8;N 為輸出層節(jié)點數(shù),n=4;l 為1~10 的整數(shù)。
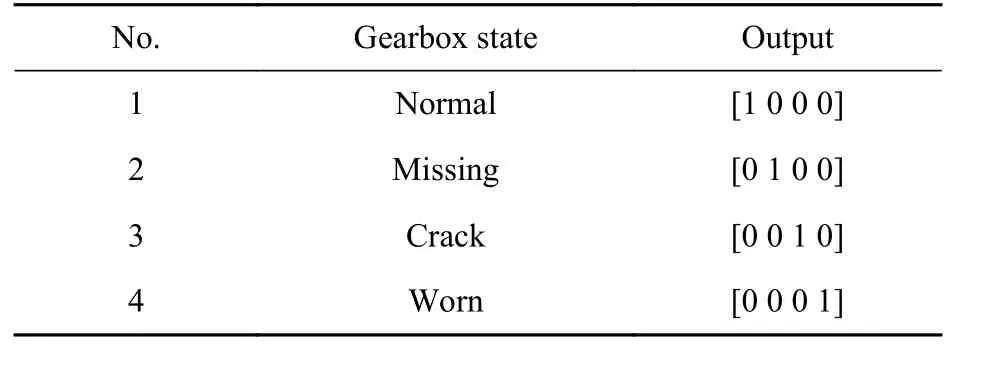
表1 齒輪狀態(tài)編碼Table 1 Gearbox status code
因此,可得網(wǎng)絡(luò)隱含層神經(jīng)元的取值空間[5,6,…,13],在集合空間內(nèi)嘗試對神經(jīng)網(wǎng)絡(luò)訓(xùn)練,結(jié)合實踐經(jīng)驗最終確定隱含層神經(jīng)元數(shù)為10。
3)神經(jīng)網(wǎng)絡(luò)模型,如圖1 所示。X1~X8 為輸入特征向量,W1、W2 為權(quán)重參數(shù),Y1~Y4 為決定4 種故障類型的向量。
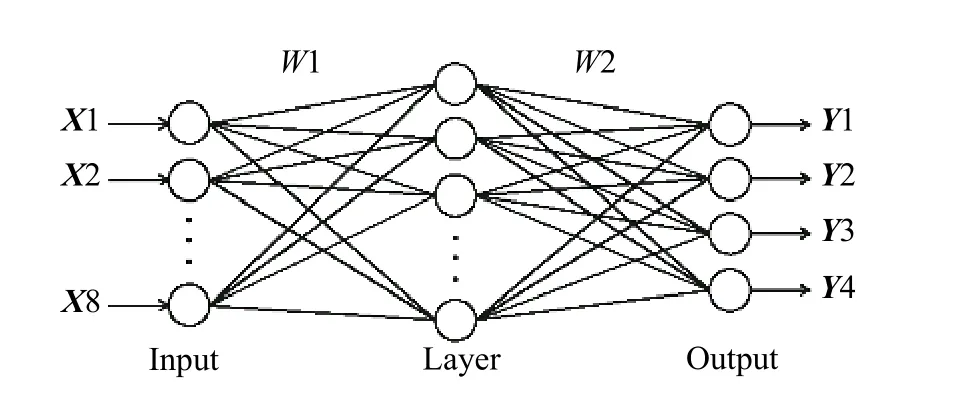
圖1 神經(jīng)網(wǎng)絡(luò)模型Fig.1 Neural network model
3 實驗驗證
3.1 齒輪傳動故障信號采集
實驗臺如圖2 所示。采樣頻率為20.48 kHz,電機(jī)轉(zhuǎn)速為1800 r/min。分別對正常、缺齒、齒根裂紋、齒面磨損的4 種類型齒輪(圖3)磨損進(jìn)行信號采集。每種故障采集16 組數(shù)據(jù),每組數(shù)據(jù)采樣點數(shù)為16 384,實驗一共獲取64 組采樣數(shù)據(jù)。

圖2 實驗臺Fig.2 Experiment rig
3.2 數(shù)據(jù)處理和網(wǎng)絡(luò)訓(xùn)練
對已采集的數(shù)據(jù)進(jìn)行整理分類,使用MATLAB軟件進(jìn)行EMD 方法編程,得出其各個IMF 分量圖,如圖4 所示。

圖3 4 種類型齒輪Fig.3 Gears of four states
按照EMD 方法對振動信號進(jìn)行分解之后,結(jié)合圖4 對分解出的各個分量進(jìn)行簡單分析,發(fā)現(xiàn)被測4 種類型波形圖有較大的區(qū)別。靠前的幾個IMF 分量的振幅相對較大,也是振動信號所蘊(yùn)含的能量主要集中的地方。圖5 所示為4 種信號分解出的前8 個分量能量圖,顯然,每種故障信號的能量分布有較為明顯的特點,以此作為BP 神經(jīng)網(wǎng)絡(luò)的輸入將會有良好的效果。
將得出的所有能量特征向量進(jìn)行歸一化操作,歸一化后的數(shù)據(jù)即可作為神經(jīng)網(wǎng)絡(luò)的輸入樣本數(shù)據(jù),其部分樣本數(shù)據(jù)和對應(yīng)的齒輪箱狀態(tài)如表2 所示。
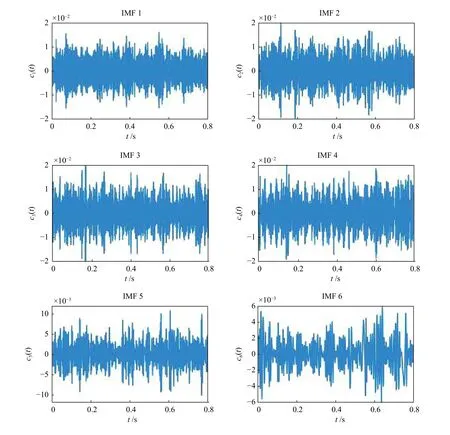

圖4 齒根裂紋EMD 波形圖Fig.4 EMD decomposition of root crack
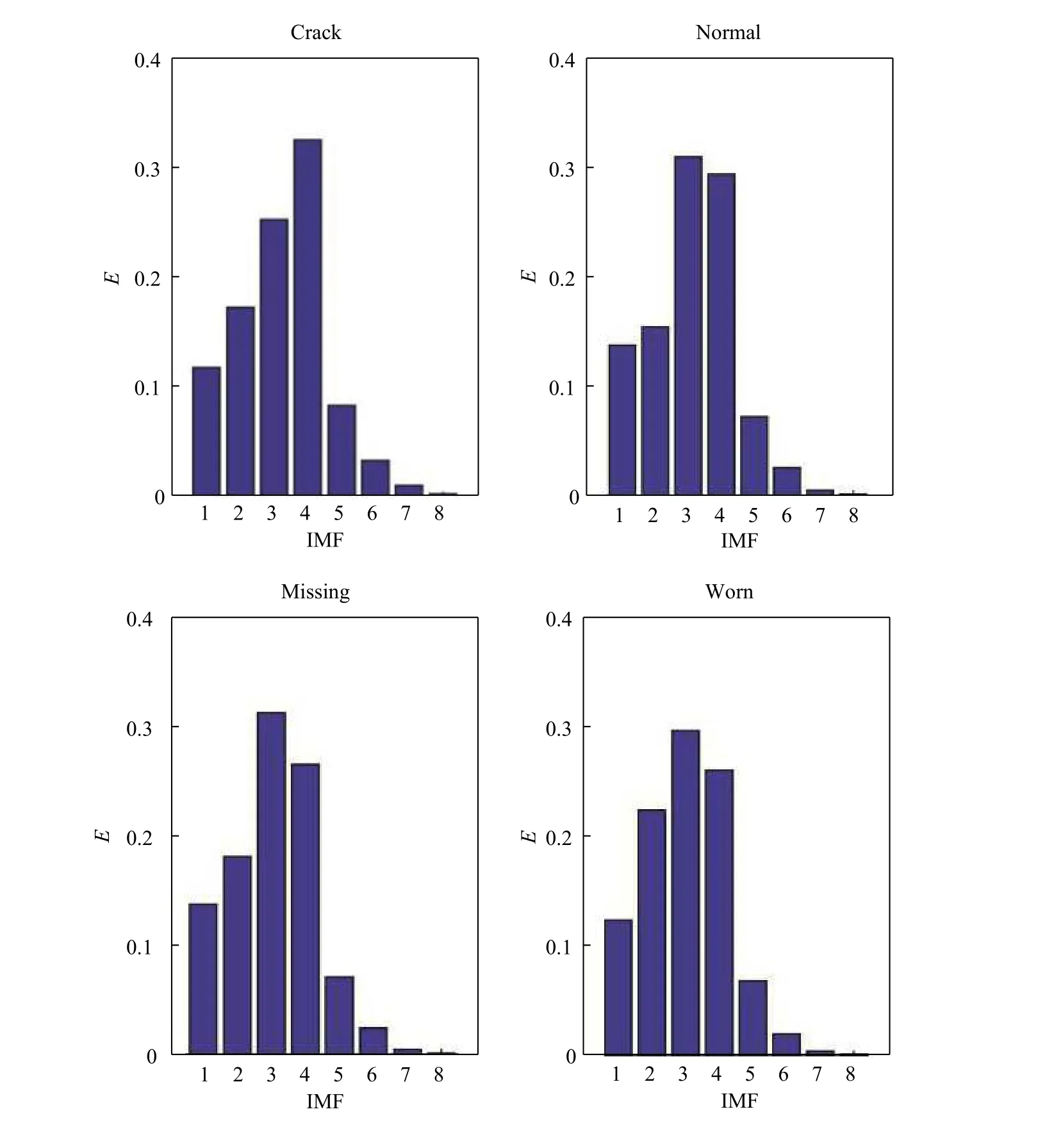
圖5 IMF 能量圖Fig.5 IMF energy
實驗所得樣本數(shù)據(jù)一共64 組,將這64 組樣本數(shù)據(jù)作為BP 神經(jīng)網(wǎng)絡(luò)的輸入,4 種模式的特征向量為輸出。其中,使用MATLAB 編程,隨機(jī)選取48 組數(shù)據(jù)作為訓(xùn)練集,另外16 組數(shù)據(jù)作為測試集。然后,設(shè)定神經(jīng)網(wǎng)絡(luò)參數(shù)。網(wǎng)絡(luò)隱含層和輸出層傳遞函數(shù)均選用Sigmoid 函數(shù),訓(xùn)練函數(shù)采用trainlm 函數(shù)[11-12],設(shè)定學(xué)習(xí)率為0.01,最大訓(xùn)練次數(shù)1000,期望誤差0.001。
3.3 診斷結(jié)果分析
圖6 為對傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練之后的誤差圖,圖7 為采用本研究所提出的EMD 與BP 神經(jīng)網(wǎng)絡(luò)方法進(jìn)行訓(xùn)練之后的誤差圖。通過誤差圖可了解到網(wǎng)絡(luò)迭代次數(shù)與均方誤差之間的關(guān)系。
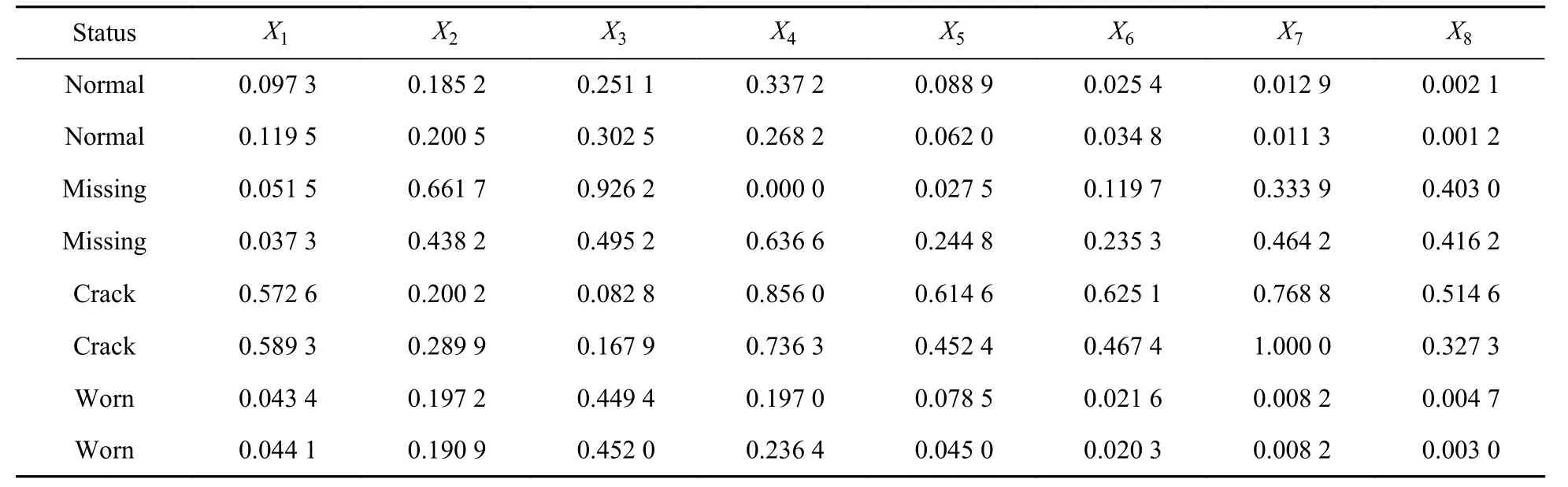
表2 輸入樣本數(shù)據(jù)Table 2 Input sample data
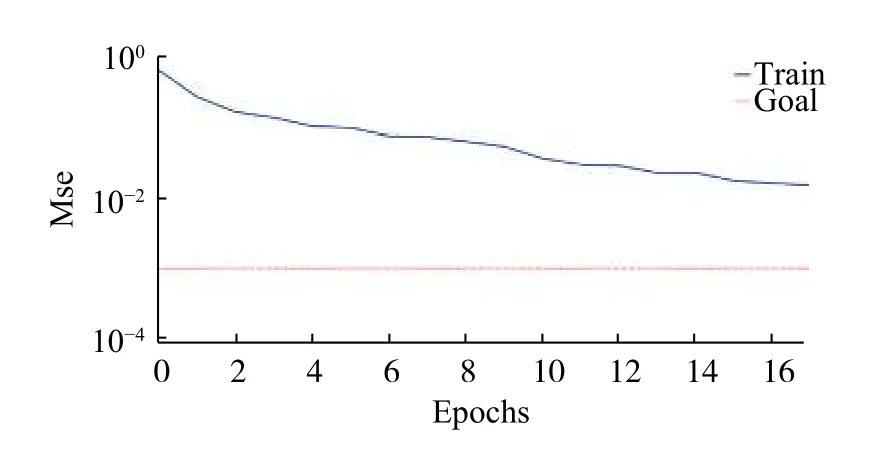
圖6 BP 神經(jīng)網(wǎng)絡(luò)誤差圖Fig.6 BP training error
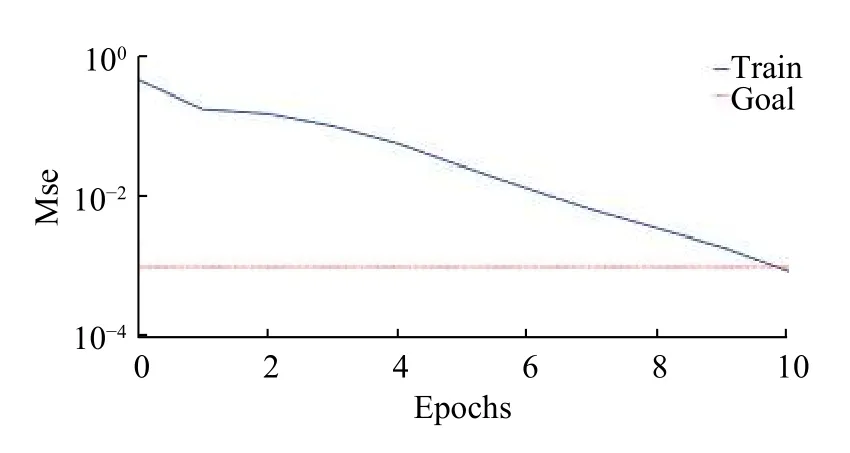
圖7 EMD 與BP 神經(jīng)網(wǎng)絡(luò)誤差圖Fig.7 EMD and BP training error
對比圖6、圖7 可以看出,相對于單一的BP神經(jīng)網(wǎng)絡(luò)診斷方法,結(jié)合了EMD 算法的BP 神經(jīng)網(wǎng)絡(luò)的方法誤差相對較小,達(dá)到了期望誤差0.001。圖7 僅經(jīng)過了10 次迭代便達(dá)到了預(yù)期效果,相比之下,提高了網(wǎng)絡(luò)訓(xùn)練速度。
為了進(jìn)一步對訓(xùn)練好的網(wǎng)絡(luò)進(jìn)行驗證,利用測試集的數(shù)據(jù)進(jìn)行測試。表3 為期望輸出和通過測試集仿真后的實際輸出部分?jǐn)?shù)據(jù),可以看出,實驗構(gòu)建的神經(jīng)網(wǎng)絡(luò)對齒輪各種故障狀態(tài)具有較高的識別率。
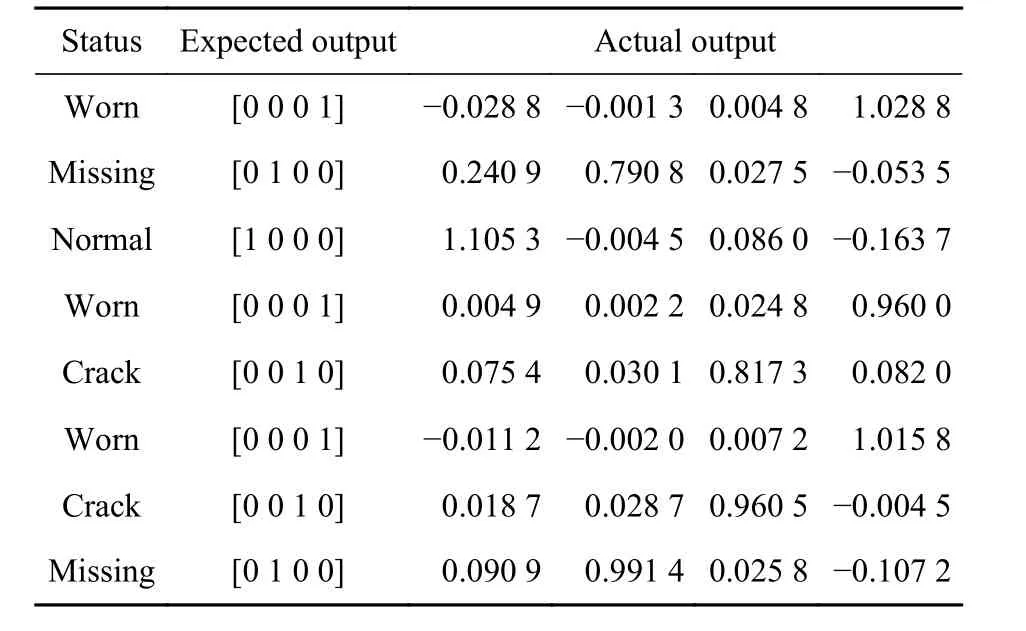
表3 預(yù)測輸出與實際輸出對比Table 3 Comparison table of expected output and actual output
4 結(jié)論
1)使用EMD 方法對采集到的信號進(jìn)行處理,提取出故障信號的若干IMF 分量,此時能夠?qū)π盘栠M(jìn)行比較直觀地分析。將提取出的故障特征參數(shù)作為BP 神經(jīng)網(wǎng)絡(luò)的輸入樣本進(jìn)行網(wǎng)絡(luò)訓(xùn)練和故障模式識別,該方法操作簡單,能夠識別多數(shù)常見故障齒輪。
2)基于EMD 和BP 神經(jīng)網(wǎng)絡(luò)的齒輪故障診斷方法,相比于傳統(tǒng)的單一BP 神經(jīng)網(wǎng)絡(luò),使其訓(xùn)練誤差從原來0.01 左右降低至0.001 左右,訓(xùn)練迭代次數(shù)可減小至10 次以內(nèi)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56