自平衡運輸車
2021-01-21 08:13:34湯先燦孫浩凱李曉燕紀光洋姜鑫
家園·電力與科技 2021年14期
湯先燦 孫浩凱 李曉燕 紀光洋 姜鑫

摘要:針對無電梯樓層間、室內外中短距離的場所及復雜地形的家電、藥品、生鮮類和易碎類物品運輸的問題設計出了自平衡運輸車。該運輸車主要由主控系統、載貨平臺升降機構、夾持貨物機構、行走機構、檢測模塊等組成。設計采用STM32F103作為主控核心,通過陀螺儀傳感器讀取角度,單片機接收到角度后通過PID計算將數值賦值給推桿電機,由推桿電機推動載貨平臺,使載貨平臺始終保持與地面平行。云臺下方裝有推桿電機,推桿電機具有自鎖功能,云臺裝有壓力傳感器,當有壓力產生就夠自動鎖緊貨物。GPS定位裝置、圖像傳輸功能以及光電開關,可以自主行走并躲避障礙以及準確定位。行走機構采用履帶式底盤,采用直流減速電機驅動;反應靈敏,耗能較低,電機采用差速方式轉向,在樓梯等復雜地形轉向更加靈活迅速。該設計有效解決了多地形搬運物品的問題,有效的提高了搬運的效率、貨物的安全以及大大節省了人力。
關鍵詞:運輸問題;自鎖;傳感器;躲避障礙;履帶式
引言:隨著科技的發展,機器人代替了人進行勞動,從而大大的解放了勞動力,但是在室內外貨物的搬運依舊還是需要大量勞動力。例如:在有很多城市內仍然有沒有安裝電梯的居民樓人們在運輸家電時將浪費大量的勞動力。在果蔬運輸時,一些大型的運輸車無法進入種植場地,只能由人力運輸到外部,再通過運輸車運輸到指定地方,加上種植場地道路復雜,在運輸過程中容易出現磕碰造成果蔬的損傷,這樣既浪費了大量的勞動力,又不能保證果蔬質量,工作效率低。在室內外運輸貨物時,搬運人員將會浪費大量勞動力去把貨物運輸到指定位置,再返回繼續搬運貨物,并且在運輸一些貴重物品、易碎物品時不能保重貨物的安全性。若能設計出一種自平衡調節平臺的運輸車,它完全可以作為人類搬運的替代工具,能夠在狹窄的樓梯、室內外復雜的環境下完成對家電、藥品、生鮮類和易碎類物品運輸,這樣能夠在運輸的過程中,保證貨物的安全性,不會造成需多損失,節省了大量的勞動力。在機器人這個科技領域中發展最快最為流行的就是服務機器人,服務機器人的出現解決了人們生活的需要勞動力的場所,服務機器人的產生大大減少了勞動力,提高了工作效率。所以,現在研究出的運輸車能夠適應多種復雜地形和運輸多種貨物并具有的智能化程度高將會是未來運輸車發展的走向。
1硬件系統設計
1.1控制系統
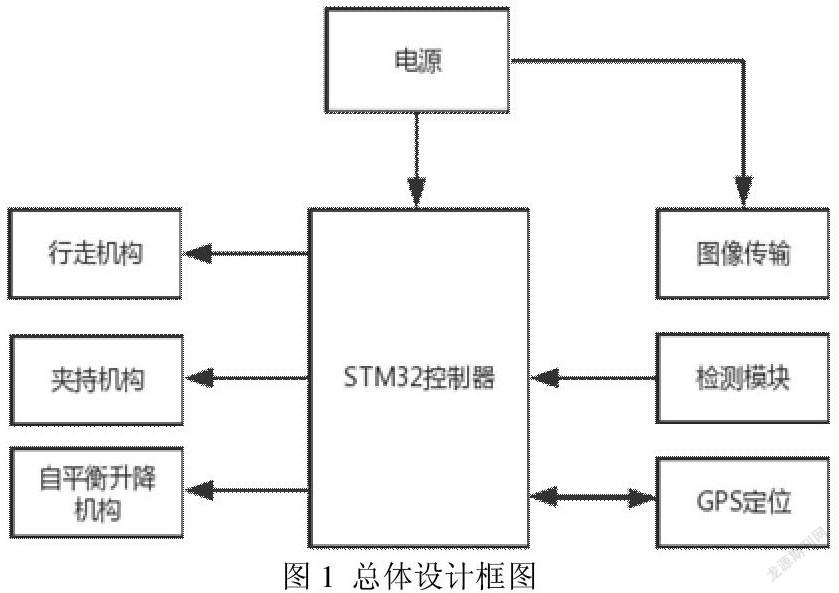
自平衡運輸車使用STM32單片機作為其主控系統。將32單片機的優點和自平衡車的設計進行結合,從而發揮最大的作用。比如STM32的CRL寄存器能夠修樹輸入、輸出形式,還能夠修樹輸出的最大速度。開漏形式和推挽形式:弱上拉和下拉電阻被禁止,開漏形式時,讀輸入數據寄存器時可取得I/O口狀況,推挽形式時,讀輸出數據寄存器時可取得最終一次寫的值,模仿輸入裝備。弱上拉和下拉電阻被禁止讀取輸入數據寄存器時數值為0。STM32和CRL相結合,可以很大程度上維持行走,圖像,以及檢測模塊的正常運行,并第一時間進行修復。給平衡車營造了一個較為安全的工作環境。系統組成如圖一所示。
1.2行走機構
關于平衡車的行走結構,我們采用了舵機帶動履帶的方式。在設計時我們收集了以往自平衡車的資料,發現當運輸車運輸貨物進過有坡度或者高低不平的道路時,運輸平臺會隨著路況變化發生傾斜,這時貨物的重心會發生前移或后移,這個現象會使運輸車上坡時需要更大的動力,爬坡的能能從而減弱,下坡時速度難易控制,抓地能力差。這種現象的產生不能保證貨物在運輸過程中的安全,從而造成貨物損傷。由此我們研究的重點便轉移到了,如何很好的保持平衡車的重心。我們針對于輪式結構和履帶式結構分別進行實驗。將兩種結構分別置于工作環境中,以及上下坡環境。最后經過實驗得出在平坦路段進行工作時,二者的工作能力沒有較大差距,但是在不平整崎嶇路段,以及上下坡路段進行工作時,履帶式結構更能保持平衡,更能發揮它的作用。因此我們采用履帶式結構作為它的行走機構。不僅如此我們還在原有基礎上,對履帶改進成了一種特制越野履帶底盤使其能夠轉向靈活適應多種復雜場。
1.3遙控器控制以及圖像傳輸
在它的行走上。我們還加入了藍牙裝置,并且配備了遙控器。在使用時打開藍牙,將遙控器與平衡車連接,就可以對遙控車進行遠程操控。不僅如此,在平衡車上添加了攝像頭,用來監控和傳輸平衡車的工作環境。使人們在使用時,可以根據攝像頭傳輸過來的影像,對平衡車的工作進行實時調整。無線遙控結合攝像頭的實時圖像傳輸,這種方式操作簡單,對復雜狹小的環境能夠做到較全面的了解,不需要程序控制,穩定性較高。同時在車身特定位置安裝光電傳感器來進行近距離的障礙物檢測。二者相互配合,既可以通過圖像傳輸完成復雜環境的了解和掌控,同時對于近處、易忽略的小型障礙物也可以采用光電傳感進行避讓。
1.4自平衡機構
本設計采用推桿電機與平行四桿機構的配合,平衡四桿機構是一種可伸縮的結構,通過折疊將它的伸縮桿放在兩側的固定桿之間,減小一定的空間。在使用時系統會通過判斷將伸縮桿進行伸展和縮緊。由此便提高了它的工作范圍,并且在一定程度上節約了能源。下面是它工作時系統識別與發出指令的詳細過程。工作時系統先判斷是否有角度的產生,當有角度產生時先通過單片機內部PID計算,將得到數值賦值PWM,驅動推桿電機動作,從而推動連接軸,帶動滑塊運動,當滑塊產生偏移時,四桿機構隨之變化使載貨平臺保持水平。采用推桿電機其推桿電機的自鎖能力和承載能力將會保證載貨平臺在運動過程中保持穩定不會發生滑動。
1.5夾持機構
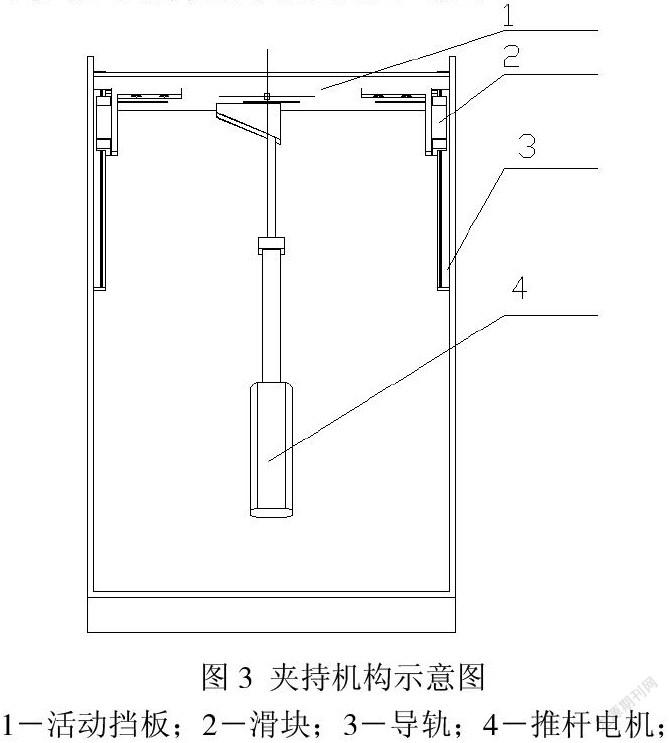
本設計為解決在運輸過程中夾緊貨物使貨物在平臺穩定,故搭載了夾持機構。夾持機構采用滑塊與推桿電機的配合,當單片機得到信號時將會驅動推桿電機動作,這時活動擋板隨之移動,滑塊在軌道上進行移動,與活動擋板同時移動。夾持機構示意圖見圖3所示。
1.6檢測裝置
我們在平衡車內部添加了幾種不同的傳感器,用來檢測它的工作環境。其中陀螺儀傳感器用來檢測和讀取角度,從而便于系統識別和下發指令。然后通過單片機的計算,將信息賦予推桿電機,從而使自平衡機構運作。壓力傳感器通過檢測運輸物體的大小和形狀,以及它的壓力大小,從而使夾持裝置做出調整。使物品的運輸更加安全,穩定。
2軟件系統設計
2.1技術路線
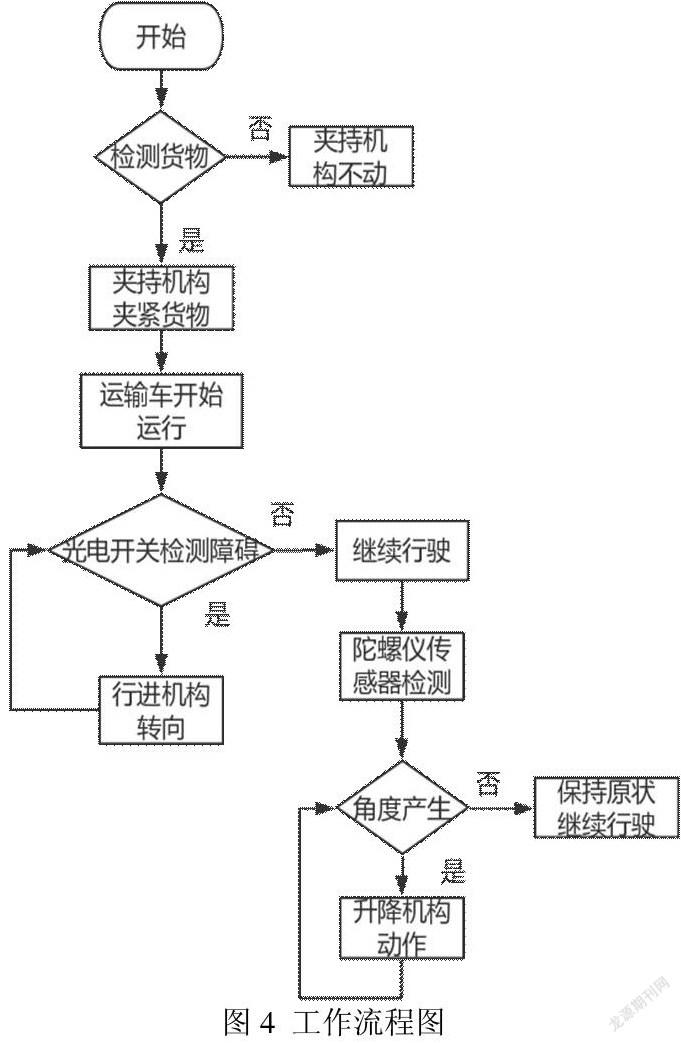
通上電時首先進行系統的初始化,當初始化串口、陀螺儀、時鐘、ADC采值、GPS完畢后進入main函數當中進行變量的初始化。程序開始先檢測壓力傳感器數值判斷是否有貨物,如果沒有貨物保持不動,否則進行下一步,運輸車開始運行,光電傳感器實時檢測控制電機避障,在運行過程中陀螺儀檢測是否有角度產生,將角度的數值經過處理,通過PID算法控制電機,使載貨平臺保持水平,然后再進行判斷角度,沒有角度產生則繼續運輸,有角度產生則再進行上一步電機的驅動,GPS在運輸中實時發送衛星位置。具體工作流程如下圖4所示。
2.2夾持貨物
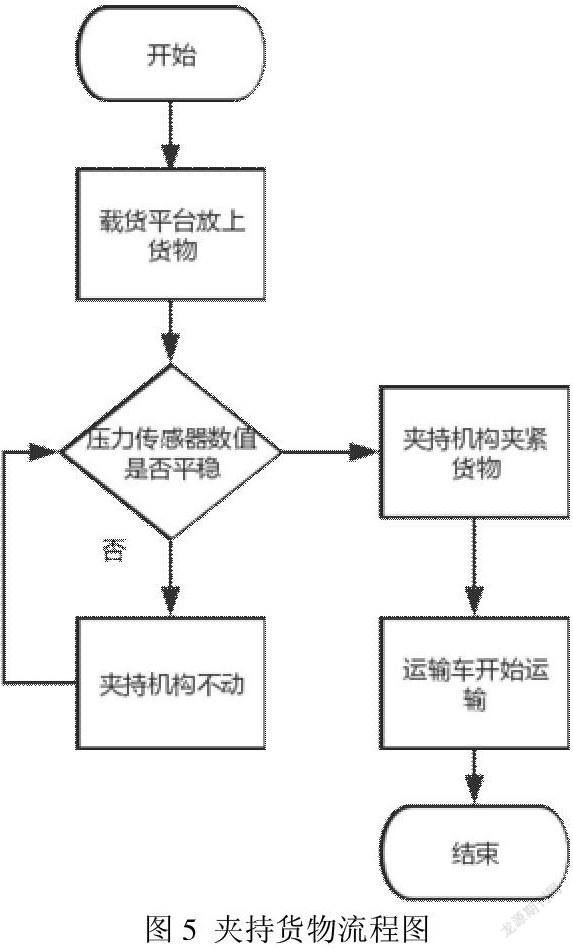
本設計采用HX711稱重模塊,當放上貨物時,程序用AD采集數值,采用均值濾波,設計連續間隔20us采集,把10次數值累加之后再除以10得到數值,連續得到均值濾波后的數值進行比較,判斷貨物是否已經平穩放上,當判斷數值偏差較小,則推桿電機進行貨物的夾緊,運輸車開始運輸動作;當數值偏大則運輸車保持不動。夾持貨物流程圖見圖5所示。
2.3載貨平臺自平衡
本設計采用電機與mpu6050陀螺儀的配合,單片機采集到的陀螺儀產生的角度,將采集的數值先進行冒泡排序和均值濾波,濾波之后的數值再根據角度PID算法程序得到電機需要轉動的方向和角度,并給推桿電機一個PWM信號使其到達平衡點,再采集到達平衡點后的運輸車的實時角度,再將該角度值反饋到單片機進行比較,從而形成閉環控制。載貨平臺自平衡的流程圖如圖6所示。
2.4基于SolidWorks軟件三維模型的設計
為了更全面充分的展示出自平衡運輸車的外觀效果,我們對其進行了SolidWorks建模設計。我們先對該作品的零件圖進行繪制。完成之后,對零件圖進行裝配。組成實物后對其進行composer動畫的制作,模擬它工作時的效果和運動狀態。從而驗證結構設計的可行性。一般在SolidWorks中會發現一些基本的結構設計不妥,或零件的選擇不當等問題,從而影響它后期的運動和工作。通過前期的SolidWorks建模,會給作品建立一個基本的結構模型,也給后期電路的制作以及實物的搭建建立一個良好的基礎。
3結論
自平衡運輸車由控制系統、自平衡機構、夾持機構、行走機構、檢測模塊、圖像傳輸及遙控等模塊組成。我們按照現如今,各行業,各人群對自平衡運輸車功能的需求進行設計。盡最大可能使其具有更全面的能力。控制系統STM32和CRL寄存器相結合,對其行走以及工作的程序進行快速的補漏,使其具有安全穩定的工作環境。行走機構利用履帶的設計,維持它工作以及崎嶇復雜路面的穩定行走。圖像傳輸模塊將平衡車工作時的影像進行實時的傳輸,和控制。檢測模塊通過傳感器的作用,測量其工作時的角度和指數,從而做出正確的判斷。幾個設計之間相互滲透,相輔相成共同完成自平衡運輸車的工作與運轉。不僅如此它還具有較高的工作效率和實用性。推廣之后,一定可以給社會和運輸行業帶來很大的實用價值與意義。
參考文獻
[1]石少健,陳燕慧.無線遠程操控果園自平衡運輸車設計[J].農機使用與維修,2019(01):11-13.
[2]乙金林,陳雯雯,張亞煒,沙春芳.基于dsPIC33EP16GS502的兩輪自平衡小車控制系統的設計[J].電子制作,2021(17):3-5.
[3]李冠奎,秦云翔.基于STM32的自平衡小車結構和系統設計[J].信息與電腦(理論版),2021,33(09):84-86.
[4]楊志強.基于STM32C8T6的智能二輪自平衡小車的設計[J].電子測試,2020(17):9-11+37.
[5]徐猛.基于STM32自平衡小車的設計與制作[J].計算機產品與流通,2019(09):110.
[6]丁汕汕. 基于模糊滑模控制的兩輪自平衡小車系統設計[D].安徽工業大學,2019.
[7]史策. 模糊滑模控制在兩輪自平衡小車中的應用研究[D].安徽工業大學,2019.
作者簡介:湯先燦(2002-),男,山東省濟寧市人,學士,研究方向:三維工程。
該項目由國家級創新創業訓練項目《自平衡運輸車》(S202113320045)支持。