無人機低空攝影測量技術在礦山地形測量數據采集中的應用
2021-01-24 07:57:16李文輝
世界有色金屬 2020年21期
李文輝
(吉林省恒基巖土勘測有限責任公司,吉林 長春 130015)
礦山地形測量數據采集是礦山地質勘查工作中一項重要工作內容,其不僅要求采集精度高,而且還要求礦山地質數據采集效率快。隨著礦產行業和科學技術的快速發展,對礦山地形測量數據采集提出了更高的要求,而目前礦山地形測量數據采集方法主要是依靠人工形式,采用簡單的測量儀器對礦山地形數據進行采集,這種傳統方法在實際應用中需要消耗大量的人力資源,并且受到礦山野外環境影響,采集時間耗時較長,已經無法滿足礦山地形測量數據采集需求,為此提出無人機低空攝影測量技術在礦山地形測量數據采集中的應用[1]。
1 基于無人機低空攝影測量技術的礦山地形測量數據采集方法
1.1 無人機低空攝影測量參數標定
在對礦山地形測量數據采集之前,首先需要對無人機低空攝影測量參數進行標定,標定的目標是為了保證無人機低空攝影測量精度,標定的無人機低空攝影測量參數包括攝像機平面坐標系橫軸與縱軸的縮放系數、攝像機平面坐標系橫軸與數軸的垂直因子等[2]。結合無人機低空攝影測量參數標定需求,采用棋盤格式標定法對其進行標定,其標定過程如下。
首先在BKS標定軟件中選取一個標定模板,該標定模板是由黑色和紅色正方形方格所組成,每個正方形方格的尺寸和大小相等,假設該標定模板上任意一點用Z(x,y,z)表示,代表任意一點在攝像機空間坐標系的三維空間坐標,則無人機低空攝影測量參數標定矩陣為:

公式(1)中,K表示為無人機低空攝影測量參數標定矩陣;w、s、e表示為無人機低空攝影平面坐標系橫軸、縱軸和豎軸的縮放系數;h、k、z表示為無人機低空攝影平面坐標系橫軸、縱軸和豎軸的垂直因子。
隨機選取標定模板一個點,將該點三維空間坐標帶入上述公式中,利用上述公式對無人機低空攝影測量參數進行標定。為了保證無人機低空攝影測量參數標定的有效性,需要選取至少六個標定模板空間坐標,進行多次標定,最終選取平均值作為參數值輸出,以此完成無人機低空攝影測量參數標定。
1.2 基于無人機低空攝影測量技術的礦山地形原始數據獲取
根據上述標定的低空攝影測量參數,結合互聯網技術在其中的應用,使用高承載量的引擎接口,進行相繼與飛行器的交互連接,此過程中,需要不斷調試連接處相機拍攝的指向方向,相機拍攝位置需要根據礦山地質勘察結果設定。為了拍攝到比較清晰的礦山地形原始數據,將無人機飛行高低控制在1000m~1200m即可,飛行高度不宜過高,否則會影響到礦山地形原始數據獲取質量。在利用無人機低空攝影測量技術進行數據獲取過程中,需要對當時的天氣情況進行評估,結合拍攝需求,應選擇晴朗的天氣進行拍攝。在完成高空無人機拍攝后,需要進一步檢測獲取圖像的質量,包括獲取的圖像是否清晰、多張圖像是否存在交叉、重影現象等問題。
無人機低空攝影測量技術獲取礦山地形原始數據步驟為:首先,利用計算機輔助工具,對地質礦山所屬材料類型進行劃分,對于偵查范圍較大的區域,為了避免消耗過多的人力物力資源,可通過gis獲取的信息,進行區域特征參數排列組合的重構。并根據拍攝實際需求,建設對應的規則集合,以此實現對拍攝影像與圖像的有效存儲。其次,對于無人機獲取的野外拍攝信息,可利用高程定位系統,直接獲取拍攝對象的位置信息。包括:經緯度信息、標高信息、定位信息等[3]。同時,結合被測量對象的特征與獲取信息的路徑,可采用計算機直接繪圖的方式,對無人機獲取的圖像信息進行自動化分類,病根數據類型及其的匹配對象,生成對應的高程數據模型,使用此模型對獲取圖像中不規范信息進行校正。在此基礎上,合理將拍攝圖像,存儲在計算機網盤中,避免信息丟失對無人機拍攝結果造成的影響。
1.3 礦山地形測繪
礦山地形原始數據獲取結束后,即轉入室內數據處理階段,通過對數據處理實現對礦山地形測繪。利用V8配套預處理程序對礦山地形三維坐標進行生成,再對圖像中個像素灰度值進行處理,保證圖像中各項數據的質量。同時,為保證將采集到的數據清晰的展現在圖像當中,還需要對其空間域進行合理規劃,其規劃公式如下:

公式(2)中,f(x,y,z)表示為原始圖像當中三維坐標具體數值;g(x,y,z)表示為經過規劃后的圖像三維坐標具體數值;T表示為原始圖像當中的操作系數。利用上述公式(2),對原始三維力圖礦山地形圖像的像素值進行強化,從而使其原始的像素灰度值發生改變,以此提升礦山地形測繪圖像的清晰度。最后,還需要將處理后的文件轉換為GBKV603.2軟件能夠有效識別的數據文件,并對其相關質量進行分析,對測量位置、礦山地形潑面圖以及礦山整體觀測質量進行分析,將其中不滿足標準測繪圖像要求的數據提出。
在上述操作基礎上,結合GBKV603.2軟件完成對礦山地形測繪圖像的生成。具體生成過程為:首先,將圖像當中所有的三維坐標數據轉換為數據文件格式,輸入到GBKV603.2軟件當中,完成對各個測量點的定位。其次,在GBKV603.2軟件中,銅鼓設置各個位置的三維圖像數據,構建包含礦山地形測量數據的整體三維坐標文件。再通過GBKV603.2軟件對礦山中具有一定特征的位置點進行規劃,以此區分不同地理位置下不同的地形測量點。從地形數據需求角度出發,將礦山基本輪廓進行描繪。最后,選擇原始三維坐標數據文件,通過對平面點展開的方式,繪制一個完整的礦山地形三維立體圖像,以此實現了礦山地形測量數據采集及可視化展現。
2 實驗
為驗證本文提出的基于無人機低空攝影測量技術的礦山地形測量數據采集方法在實際應用中的可行性,將其與傳統數據采集方法進行對比。以某礦山企業正在開采的礦山為例,隨機在礦山區域內標記八個已知礦山地形數據的位置,分 別 為 :A:(210.5m,152.5m)、B:(204.4m,173.5m)、C :(198.5m,165.4m)、D :(185.4m,143.4m)、E :(172.4m,132.5m)、F:(163.4m,135.5m)、G :(142.7m,112.4m)、H:(123.7m,101.5m)。分別利用本文提出的數據采集方法和傳統數據采集方法對八個已知礦山地形數據的區域進行測量,假設本文數據采集方法為實驗組,傳統數據采集方法為對照組。記錄實驗組與對對照組在得出實際礦山地形數據時消耗的時間,并繪制成如表2所示的實驗結果對比表。
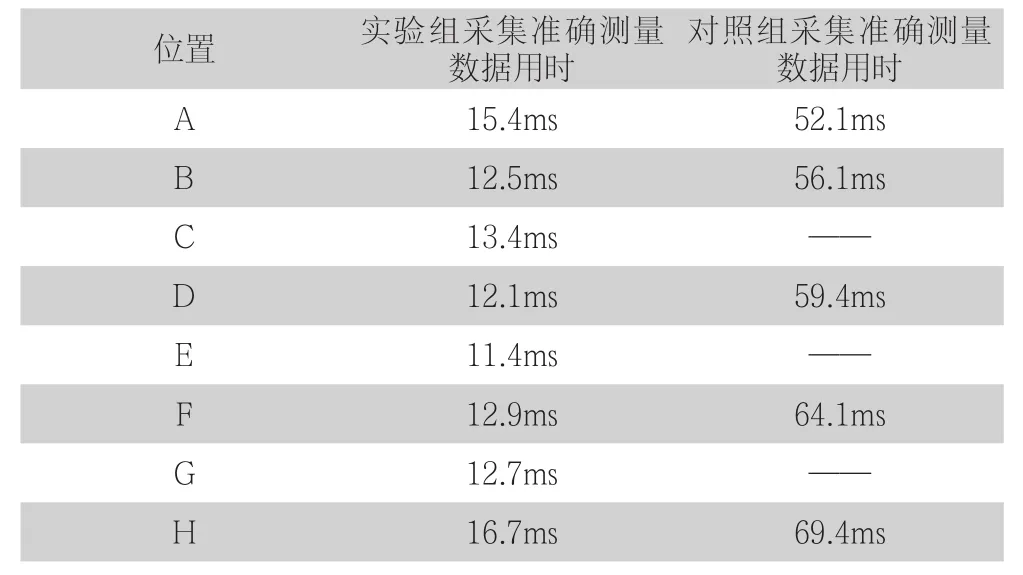
表1 實驗組與對照組實驗結果對比表
由表1可以看出,實驗組在采集到八個區域準確的定性測量數據時所消耗的時間明顯小于對照組,并且在對C區域、E區域和G區域進行數據采集時,對照組無法得到準確的測量數據,其主要原因是由于上述三個區域的地形相對復雜,傳統采集方法無法正常實施采集步驟,而本文提出的數據采集方法能夠在保證采集數據精準度的前提下,縮短采集數據用時。
因此,通過對比實驗證明,本文提出的基于無人機低空攝影測量技術的礦山地形測量數據采集方法具有更高的采集效率,并且針對復雜地形條件下的數據依然能夠保證其效率,具有更高的應用價值,值得在礦山企業得到廣泛應用和推廣。
3 結束語
本文將無人機低空攝影測量技術應用到礦山地形測量數據采集中,形成一種新的礦山地形測量數據采集方法,無人機低空攝影測量技術的應用有效提高了數據采集精度和效率,同時也提高了礦山地形測量數據采集技術水平。
猜你喜歡
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
