車(chē)聯(lián)網(wǎng)關(guān)鍵技術(shù)及其發(fā)展趨勢(shì)與挑戰(zhàn)*
2021-01-26 03:59:52劉會(huì)衡程曉紅
通信技術(shù) 2021年1期
關(guān)鍵詞:信息
肖 瑤,劉會(huì)衡,程曉紅
(1.湖北文理學(xué)院 物理與電子工程學(xué)院,湖北 襄陽(yáng) 441053;2.湖北文理學(xué)院 機(jī)械工程學(xué)院,湖北 襄陽(yáng) 441053;3.湖北文理學(xué)院 低維光電材料與器件湖北省重點(diǎn)實(shí)驗(yàn)室,湖北 襄陽(yáng) 441053)
0 引言
在高速發(fā)展的信息時(shí)代,汽車(chē)既是擴(kuò)大人類(lèi)出行半徑的交通工具,也是豐富日常生活的娛樂(lè)伴侶。截至2020 年9 月,我國(guó)機(jī)動(dòng)車(chē)保有量達(dá)到3.65 億輛,汽車(chē)在帶給人們便利出行的同時(shí)也給社會(huì)環(huán)境帶來(lái)了巨大的壓力。例如讓人頭疼的交通擁堵?tīng)顩r,車(chē)輛高密度時(shí)頻發(fā)的交通事故以及車(chē)輛尾氣排放引起的環(huán)境污染問(wèn)題等等。究其原因是現(xiàn)在大多數(shù)汽車(chē)只是單純地作為出行的輔助工具,還沒(méi)有足夠成熟的智能車(chē)聯(lián)網(wǎng)技術(shù)來(lái)實(shí)現(xiàn)車(chē)輛“聰明”的出行,就像現(xiàn)在“智慧”的手機(jī)一樣,可通過(guò)“車(chē)載電話”或是“車(chē)載視頻”解決通話問(wèn)題,通過(guò)種類(lèi)繁多的“車(chē)載App”來(lái)滿足人們?nèi)粘3鲂兄械谋姸嘈枨蟆?/p>
車(chē)聯(lián)網(wǎng)(Internet of Vehicles,IoV)是汽車(chē)、電子、通信、互聯(lián)網(wǎng)等多個(gè)領(lǐng)域交融的結(jié)合體。車(chē)聯(lián)網(wǎng)技術(shù)被認(rèn)為是未來(lái)智能交通系統(tǒng)的核心組成部分,也是5G 垂直應(yīng)用最具有前景的實(shí)用型技術(shù)之一,還是緩解現(xiàn)有交通堵塞,降低車(chē)禍發(fā)生概率最有效的智能技術(shù)之一,更是實(shí)現(xiàn)自動(dòng)駕駛甚至無(wú)人駕駛必不可少的技術(shù)支撐[1]。
1 車(chē)聯(lián)網(wǎng)國(guó)內(nèi)外發(fā)展與應(yīng)用現(xiàn)狀
1.1 國(guó)內(nèi)外發(fā)展現(xiàn)狀
自美國(guó)交通部2015 年發(fā)布《智能交通系統(tǒng)(Intelligent Transport System,ITS) 戰(zhàn)略規(guī)劃》以來(lái),車(chē)聯(lián)網(wǎng)技術(shù)圍繞智能化和信息共享化兩大主題蓬勃發(fā)展[2]。車(chē)聯(lián)網(wǎng)技術(shù)發(fā)展前期,美國(guó)只認(rèn)可專(zhuān)用短程通信技術(shù)(Dedicated Short Range Communications,DSRC)這一標(biāo)準(zhǔn),如今在世界車(chē)聯(lián)網(wǎng)標(biāo)準(zhǔn)改革創(chuàng)新的大趨勢(shì)下,美國(guó)先后對(duì)26 個(gè)州展開(kāi)V2X(Vehicle-to-everything)技術(shù)試點(diǎn)實(shí)驗(yàn),與此同時(shí)蜂窩車(chē)聯(lián)網(wǎng)通信技術(shù)(Cellular Vehicle-toeverything,C-V2X)實(shí)驗(yàn)也在全力推進(jìn),甚至將原來(lái)分配給DSRC 的5.9GHz 頻段重新分配給C-V2X,全力推進(jìn)車(chē)聯(lián)網(wǎng)技術(shù)的發(fā)展。
2019 年12 月,我國(guó)發(fā)布《車(chē)聯(lián)網(wǎng)知識(shí)產(chǎn)權(quán)白皮書(shū)》,從車(chē)聯(lián)網(wǎng)知識(shí)產(chǎn)權(quán)狀況、車(chē)聯(lián)網(wǎng)專(zhuān)利運(yùn)行機(jī)構(gòu)、車(chē)聯(lián)網(wǎng)知識(shí)產(chǎn)權(quán)訴訟三個(gè)方面對(duì)車(chē)聯(lián)網(wǎng)國(guó)內(nèi)外知識(shí)產(chǎn)權(quán)現(xiàn)狀及趨勢(shì)進(jìn)行分析,并為車(chē)聯(lián)網(wǎng)未來(lái)的發(fā)展指明了方向。2020 年1 月,我國(guó)工信部發(fā)表聲明,承認(rèn)C-V2X 技術(shù)是中國(guó)車(chē)聯(lián)網(wǎng)技術(shù)的唯一標(biāo)準(zhǔn)。
回顧LTE-V2X 標(biāo)準(zhǔn)的發(fā)展歷程,2017 年3 月3GPP 發(fā)布支持LTE-V2X 的Release-14 標(biāo)準(zhǔn),基本完成V2X 體系的框架研究。2018 年6 月LTE-V2X技術(shù)的增強(qiáng)版本——支持LTE-eV2X 的Release-15標(biāo)準(zhǔn)制定完成,此標(biāo)準(zhǔn)不僅增強(qiáng)了各接口之間的載波聚合和高階調(diào)制能力,還提高了直通模式下數(shù)據(jù)傳輸速率和可靠性。2020 年7 月,第一個(gè)支持5G-V2X(NR-V2X)標(biāo)準(zhǔn)的Release-16 版本落地,考慮5G-V2X 技術(shù)向垂直行業(yè)進(jìn)行擴(kuò)展,并且在移動(dòng)性和能耗等關(guān)鍵功能上有所增強(qiáng)。支持增強(qiáng)型的5G-V2X 的Release-17 標(biāo)準(zhǔn)制定工作也已于2019 年年底啟動(dòng),預(yù)計(jì)將在2021 年12 月底發(fā)布,其工作重點(diǎn)在于進(jìn)一步增強(qiáng)5G 系統(tǒng)的功能,達(dá)到時(shí)延更低、可靠性更高、傳輸速率更快的目標(biāo)。按照C-V2X 標(biāo)準(zhǔn)化工作的部署規(guī)劃,預(yù)計(jì)到2022 年C-V2X 將具備大規(guī)模部署的基礎(chǔ)。
2020 年11 月11 日,世界智能網(wǎng)聯(lián)汽車(chē)大會(huì)發(fā)布了《智能網(wǎng)聯(lián)汽車(chē)技術(shù)路線圖2.0》,提出了在2035 年之前智能網(wǎng)聯(lián)汽車(chē)的主要發(fā)展路線、發(fā)展愿景以及戰(zhàn)略目標(biāo),為智能車(chē)聯(lián)網(wǎng)的發(fā)展進(jìn)一步指明了方向[3]。它指出,未來(lái)車(chē)聯(lián)網(wǎng)技術(shù)發(fā)展包括四個(gè)時(shí)間節(jié)點(diǎn)。2020 年安全輔助駕駛系統(tǒng)和網(wǎng)聯(lián)輔助信息相結(jié)合,實(shí)現(xiàn)車(chē)輛的部分自動(dòng)駕駛功能,車(chē)輛具備初級(jí)網(wǎng)聯(lián)功能。2025 年左右,有條件自動(dòng)駕駛技術(shù)規(guī)模化應(yīng)用并向高度自動(dòng)化駕駛技術(shù)升級(jí)過(guò)渡[4]。2030 年實(shí)現(xiàn)高度自動(dòng)化駕駛技術(shù)的大范圍應(yīng)用,主要應(yīng)用場(chǎng)景為高速公路以及城市主要道路。2035 年徹底實(shí)現(xiàn)車(chē)輛的完全自動(dòng)駕駛。
1.2 產(chǎn)業(yè)發(fā)展情況
車(chē)聯(lián)網(wǎng)是信息領(lǐng)域、工業(yè)領(lǐng)域的深度融合,也是5G 垂直應(yīng)用的重要方向,具有巨大的發(fā)展?jié)摿妄嫶蟮氖袌?chǎng)空間。車(chē)聯(lián)網(wǎng)產(chǎn)業(yè)發(fā)展歷程可分為四個(gè)階段。
(1)第一階段(2009—2010),萌芽階段。車(chē)聯(lián)網(wǎng)的發(fā)展主要由零部件供應(yīng)商主導(dǎo),應(yīng)用多以商用為主,車(chē)聯(lián)網(wǎng)技術(shù)主要為基于傳感器的車(chē)載技術(shù)。
(2)第二階段(2011—2013),積累階段。國(guó)家“十二五”規(guī)劃將車(chē)聯(lián)網(wǎng)作為物聯(lián)網(wǎng)十大重點(diǎn)部署領(lǐng)域之一,并出臺(tái)了相關(guān)政策推動(dòng)智能網(wǎng)聯(lián)汽車(chē)發(fā)展。
(3)第三階段(2014—2015),摸索階段。各大互聯(lián)網(wǎng)公司紛紛加入車(chē)聯(lián)網(wǎng)體系中,爭(zhēng)先恐后推出各自車(chē)聯(lián)網(wǎng)產(chǎn)品,但以?shī)蕵?lè)型產(chǎn)品為主,自主研發(fā)創(chuàng)新能力還有待提升。
(4)第四階段(2016—2020),加速階段。車(chē)聯(lián)網(wǎng)產(chǎn)業(yè)進(jìn)入高速發(fā)展的新階段,“車(chē)—路—人—云”協(xié)同感知的“生態(tài)車(chē)聯(lián)網(wǎng)”體系受到廣泛關(guān)注,國(guó)內(nèi)外競(jìng)相展開(kāi)對(duì)車(chē)聯(lián)網(wǎng)技術(shù)的研究。
2 車(chē)聯(lián)網(wǎng)體系結(jié)構(gòu)
2.1 車(chē)聯(lián)網(wǎng)的由來(lái)
車(chē)聯(lián)網(wǎng)來(lái)源于對(duì)物聯(lián)網(wǎng)這一概念的延伸,物聯(lián)網(wǎng)的含義是以互聯(lián)網(wǎng)為核心,物物相連組成的通信網(wǎng)絡(luò)。車(chē)聯(lián)網(wǎng)意義與之相似,即在通信協(xié)議和數(shù)據(jù)交互標(biāo)準(zhǔn)之下,通過(guò)現(xiàn)代無(wú)線通信技術(shù),實(shí)現(xiàn)車(chē)—車(chē)(Vehicle-to-Vehicle,V2V)、車(chē)—人(Vehicleto-People,V2P)、車(chē)— 路邊單元(Vehicle-to-Infrastructure,V2I)及車(chē)—互聯(lián)網(wǎng)(Vehicle-to-Network,V2N)之間進(jìn)行信息交互,實(shí)現(xiàn)對(duì)交通的智能化管理,達(dá)到“車(chē)—路—人—云”的感知協(xié)同化發(fā)展[5]。
車(chē)聯(lián)網(wǎng)以車(chē)內(nèi)網(wǎng)、車(chē)際網(wǎng)、車(chē)載移動(dòng)網(wǎng)絡(luò)為基礎(chǔ),搭載先進(jìn)的車(chē)載傳感器、控制器和執(zhí)行器,融合定位技術(shù)、信息處理技術(shù)、無(wú)線通信技術(shù)和智能決策控制技術(shù)構(gòu)建高度協(xié)同的車(chē)聯(lián)網(wǎng)生態(tài)體系[6]。在V2V 通信中,車(chē)輛在向其他車(chē)輛發(fā)送自身速度、位置等信息的同時(shí),接收來(lái)自其他車(chē)輛的行駛狀態(tài)信息,同時(shí)結(jié)合傳感器、攝像頭等設(shè)備收集到的信息,實(shí)現(xiàn)對(duì)周?chē)h(huán)境狀況的感知,輔助駕駛員安全駕駛。V2V 通信將獨(dú)立駕駛的車(chē)輛緊密聯(lián)系在一起,形成信息交互共享的車(chē)輛自組織網(wǎng)絡(luò)(Vehicular Ad-hoc Network,VANET)。對(duì)于V2I 通信,車(chē)輛主要與路邊單元(Rode Side Unit,RSU)或基站進(jìn)行通信。在車(chē)輛密度較大的場(chǎng)景下,RSU 可為車(chē)輛進(jìn)行路徑規(guī)劃及速度建議。通過(guò)V2I 技術(shù),將“智慧”的車(chē)和“聰明”的路結(jié)合起來(lái)使出行更加快捷。在V2P 通信中,每個(gè)車(chē)載終端與行人攜帶的移動(dòng)終端設(shè)備進(jìn)行通信,一方面行人可獲知車(chē)輛運(yùn)行軌跡及速度大小,另一方面車(chē)輛也可提前減速規(guī)避人群,保障車(chē)聯(lián)網(wǎng)體系中弱勢(shì)群體行人的安全。除此之外,V2P 通信還可用于停車(chē)找車(chē)場(chǎng)景中,通過(guò)移動(dòng)終端設(shè)備定位車(chē)輛位置或者空余的車(chē)位。對(duì)于V2N 通信,車(chē)輛則主要與云端進(jìn)行信息交互,實(shí)現(xiàn)計(jì)算數(shù)據(jù)的靈活卸載、傳輸及存儲(chǔ)。云平臺(tái)對(duì)收集到的海量數(shù)據(jù)進(jìn)行處理分析后可為車(chē)輛提供定位、緊急救援、信息娛樂(lè)等服務(wù)。
2.2 車(chē)聯(lián)網(wǎng)架構(gòu)
按照網(wǎng)絡(luò)架構(gòu)劃分,車(chē)聯(lián)網(wǎng)的體系結(jié)構(gòu)可以劃分為三層:感知層、網(wǎng)絡(luò)層和應(yīng)用層[7],具體劃分如圖1 所示。
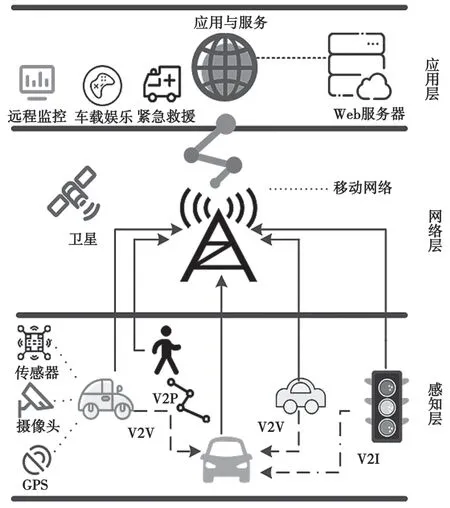
圖1 車(chē)聯(lián)網(wǎng)體系架構(gòu)
(1)感知層。感知層被稱(chēng)作車(chē)聯(lián)網(wǎng)的“神經(jīng)末梢”,通過(guò)車(chē)載傳感器、雷達(dá)以及定位系統(tǒng)的協(xié)同感知,將收集到的車(chē)內(nèi)外行駛狀態(tài)信息、交通狀況信息和道路環(huán)境信息反饋給駕駛員,駕駛員根據(jù)收到的反饋信息作出行駛決策,實(shí)現(xiàn)感知數(shù)據(jù)輔助駕駛的功能[8]。例如車(chē)輛前方防撞預(yù)警技術(shù),根據(jù)傳感器接收到的前方障礙物感知信息,行車(chē)人員可以預(yù)先作出下一步的行駛決策,防止撞上前方車(chē)輛。
(2)網(wǎng)絡(luò)層。網(wǎng)絡(luò)層充當(dāng)車(chē)聯(lián)網(wǎng)的“大腦”,主要通過(guò)車(chē)載網(wǎng)絡(luò)、互聯(lián)網(wǎng)以及無(wú)線通信網(wǎng)絡(luò)分析處理感知層所收集到的數(shù)據(jù),實(shí)現(xiàn)車(chē)聯(lián)網(wǎng)網(wǎng)絡(luò)接入、數(shù)據(jù)分析、數(shù)據(jù)傳輸以及車(chē)輛節(jié)點(diǎn)管理等功能[9]。網(wǎng)絡(luò)層還為終端用戶提供實(shí)時(shí)的信息交互以及無(wú)線資源的分配,達(dá)到信息負(fù)載的平衡以及異構(gòu)網(wǎng)絡(luò)的無(wú)縫銜接訪問(wèn)功能。
(3)應(yīng)用層。應(yīng)用層是車(chē)聯(lián)網(wǎng)體系架構(gòu)的最高層,主要為用戶提供不同的服務(wù)。根據(jù)不同用戶的需求提供不同的應(yīng)用程序,例如車(chē)載娛樂(lè)、遠(yuǎn)程監(jiān)控以及緊急救援等功能。
從功能上看,車(chē)聯(lián)網(wǎng)主要由端系統(tǒng)和管系統(tǒng)兩大部分組成。如圖2 所示,系統(tǒng)包括了人、車(chē)、路、云和V2X 五個(gè)功能實(shí)體。
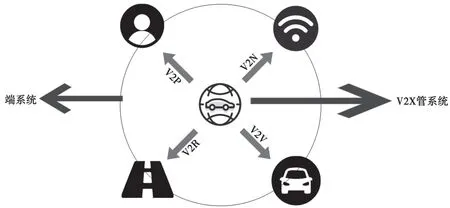
圖2 車(chē)聯(lián)網(wǎng)端、管系統(tǒng)
(1)端系統(tǒng)。行人端、車(chē)端、路端和云端組成端系統(tǒng)。行人因其在車(chē)聯(lián)網(wǎng)環(huán)境中安全隱患最大而處于弱勢(shì)地位,只能通過(guò)自身攜帶的移動(dòng)終端設(shè)備經(jīng)V2X 管道收發(fā)信息,以此來(lái)感知周?chē)煌顩r進(jìn)行行駛路線調(diào)整,保障自身安全[10]。車(chē)端是整個(gè)車(chē)聯(lián)網(wǎng)的核心,V2X 的含義是以車(chē)為主體,與“X”即行人端、路端以及云端進(jìn)行通信。路端主要通過(guò)智能路側(cè)單元為車(chē)端、云端和行人端傳送交通路況信息,提供輔助交通的數(shù)據(jù)支持。云端在車(chē)聯(lián)網(wǎng)中承擔(dān)數(shù)據(jù)存儲(chǔ)、分析和智能決策的任務(wù),承載不同用戶的業(yè)務(wù)需求和數(shù)據(jù)需求。
(2)管系統(tǒng)。V2X 被稱(chēng)作是車(chē)聯(lián)網(wǎng)的“管”,是各個(gè)終端進(jìn)行通信連接、車(chē)輛自組織網(wǎng)絡(luò)與異構(gòu)網(wǎng)絡(luò)有效銜接的管道,保證各端之間信息交互的實(shí)時(shí)性、可服務(wù)性以及網(wǎng)絡(luò)泛在性。目前應(yīng)用廣泛的是LTE-V2X 和DSRC 兩種典型的無(wú)線通信技術(shù)。前者可以實(shí)現(xiàn)網(wǎng)關(guān)或基站覆蓋范圍內(nèi)所有端之間的通信連接,后者只能實(shí)現(xiàn)小范圍內(nèi)車(chē)與路端或車(chē)端之間的通信連接[11]。
3 車(chē)聯(lián)網(wǎng)關(guān)鍵技術(shù)
3.1 車(chē)內(nèi)網(wǎng)
車(chē)內(nèi)網(wǎng)主要是指車(chē)內(nèi)的通信網(wǎng)絡(luò),例如CAN總線控制的區(qū)域網(wǎng)絡(luò),涉及車(chē)聯(lián)網(wǎng)體系中的單車(chē)關(guān)鍵技術(shù)主要有傳感器感知技術(shù)、定位技術(shù)以及語(yǔ)音識(shí)別技術(shù)等。
3.1.1 整體感知技術(shù)
整體感知技術(shù)主要分為兩個(gè)部分,一是車(chē)輛自身狀態(tài)感知,主要通過(guò)里程計(jì)數(shù)器、車(chē)輛電機(jī)來(lái)實(shí)現(xiàn)對(duì)車(chē)輛行駛速度、方向、車(chē)輪轉(zhuǎn)向等狀態(tài)信息的采集。二是車(chē)輛對(duì)環(huán)境的感知,利用雷達(dá)技術(shù)、攝像機(jī)等電子設(shè)備完成對(duì)車(chē)輛周?chē)煌ㄐ畔顩r的采集,相當(dāng)于車(chē)輛的“眼睛”和“耳朵”[12]。感知技術(shù)為車(chē)輛智能決策提供數(shù)據(jù)支持,使得車(chē)輛對(duì)環(huán)境的適應(yīng)能力進(jìn)一步增強(qiáng)。
3.1.2 定位技術(shù)
只有準(zhǔn)確知道車(chē)輛的具體位置,才能進(jìn)一步實(shí)現(xiàn)車(chē)輛的遠(yuǎn)程監(jiān)控和輔助駕駛等功能。現(xiàn)有智能汽車(chē)主要采用全球定位系統(tǒng)(Global Positioning System,GPS)或北斗導(dǎo)航系統(tǒng)進(jìn)行定位或?qū)Ш剑瑫r(shí)車(chē)聯(lián)網(wǎng)還可采用其他定位技術(shù),例如微波雷達(dá)定位技術(shù)。在天氣惡劣的情況下,微波雷達(dá)定位技術(shù)的性能仍能保持在比較穩(wěn)定的狀態(tài),它可通過(guò)無(wú)線電波直接測(cè)量車(chē)與車(chē)之間的距離,準(zhǔn)確獲知車(chē)輛速度、方位等信息[13]。在未來(lái)智能網(wǎng)聯(lián)汽車(chē)的發(fā)展過(guò)程中,多傳感器協(xié)同工作提高車(chē)輛定位精度的方式將成為趨勢(shì),因?yàn)閱蝹€(gè)傳感器進(jìn)行數(shù)據(jù)采集,必然會(huì)在空間或時(shí)間上出現(xiàn)信息采集的空缺,數(shù)據(jù)的可靠性無(wú)法得到保證,多傳感器協(xié)同工作互補(bǔ)彼此在性能上的不足,進(jìn)一步提升定位精準(zhǔn)度。
3.1.3 語(yǔ)音識(shí)別技術(shù)
駕駛?cè)藛T在行車(chē)途中要求注意力高度集中,但路途中難免有點(diǎn)擊屏幕、接聽(tīng)電話等需要將手離開(kāi)方向盤(pán)的操作,這種不安全的駕駛行為危險(xiǎn)系數(shù)極高。如果車(chē)載裝置也擁有和智能手機(jī)相同的“語(yǔ)音助手”,駕駛員只需要發(fā)出語(yǔ)音指令,車(chē)載系統(tǒng)便能利用“語(yǔ)音助手”識(shí)別并執(zhí)行指令,這將在便利駕駛員通信的同時(shí),大大降低交通事故的發(fā)生概率[14]。語(yǔ)音識(shí)別技術(shù)就是通過(guò)車(chē)載智能設(shè)備對(duì)駕駛?cè)藛T發(fā)出的語(yǔ)音指令進(jìn)行識(shí)別,進(jìn)而翻譯為相應(yīng)的機(jī)器指令,最終完成語(yǔ)音撥號(hào)、語(yǔ)音在線導(dǎo)航以及語(yǔ)言轉(zhuǎn)換等功能,徹底解放駕駛員雙手,保障行車(chē)安全。
3.2 車(chē)際網(wǎng)
車(chē)際網(wǎng)相對(duì)于車(chē)內(nèi)網(wǎng)而言,即為車(chē)輛的外部網(wǎng)絡(luò),主要包括V2V、V2I 以及車(chē)輛自組織網(wǎng)絡(luò)。
3.2.1 無(wú)線通信技術(shù)
(1)DSRC。DSRC 工作在5.9 GHz 頻帶上,帶寬范圍為75MHz,通信距離在1000m 左右。DSRC 的標(biāo)準(zhǔn)是IEEE802.11,它使用的MAC 協(xié)議簡(jiǎn)單且特征明顯,可實(shí)現(xiàn)分布式操作,主要應(yīng)用于ad-hoc(點(diǎn)對(duì)點(diǎn))通信模式,目前美國(guó)在該技術(shù)的發(fā)展上相對(duì)成熟。根據(jù)需要提供的V2X 應(yīng)用程序類(lèi)型和支持通信標(biāo)準(zhǔn)的不同,每個(gè)DSRC 頻段可以以單個(gè)頻道進(jìn)行使用,也可以分成多個(gè)通道進(jìn)行使用[15]。
DSRC 主要應(yīng)用于V2V 場(chǎng)景。該場(chǎng)景下消息類(lèi)型多為緊急事故,例如前方車(chē)輛發(fā)生車(chē)禍,需要緊急告知后方車(chē)輛提前減速防止二次車(chē)禍的發(fā)生,因此對(duì)通信連接的時(shí)延和可靠性要求極高,而DSRC技術(shù)的短程通信特點(diǎn)正好滿足了車(chē)輛之間通信的這兩大需求[16]。在實(shí)際應(yīng)用中,車(chē)輛必須處于路邊部署的網(wǎng)關(guān)(RSU)覆蓋范圍之內(nèi),車(chē)載網(wǎng)絡(luò)訪問(wèn)才能順利進(jìn)行。但是,在高速移動(dòng)場(chǎng)景下,車(chē)輛與路邊網(wǎng)關(guān)RSU 的連接時(shí)間極短,車(chē)輛不斷進(jìn)行網(wǎng)絡(luò)的水平切換,極有可能出現(xiàn)通信中斷的情況。當(dāng)車(chē)輛密度很大時(shí),盡管采取以周?chē)?chē)輛作為中繼站的方法來(lái)擴(kuò)大通信范圍,也無(wú)法保證車(chē)與網(wǎng)關(guān)之間時(shí)刻存在網(wǎng)絡(luò)路徑。同時(shí)在這種車(chē)輛高速移動(dòng)和高密度場(chǎng)景下,數(shù)據(jù)的高傳輸率和高時(shí)延沖突使得車(chē)輛之間的信道競(jìng)爭(zhēng)會(huì)變得更加激烈,結(jié)果導(dǎo)致IEEE 802.11 性能減弱,V2V 通信質(zhì)量大打折扣。
(2)C-V2X。C-V2X 技術(shù)是指基于蜂窩網(wǎng)絡(luò)的V2X 技術(shù),包括LTE-V2X 以及正在發(fā)展的5G-V2X 技術(shù)。LTE-V2X 是指基于LTE 移動(dòng)通信技術(shù)演變形成的V2X 車(chē)聯(lián)網(wǎng)無(wú)線通信技術(shù),包括蜂窩通信和直接通信兩種工作模式。蜂窩通信借助已有的LTE 蜂窩網(wǎng)絡(luò),支持網(wǎng)絡(luò)覆蓋范圍廣、帶寬需求大的通信連接;直接通信則不經(jīng)過(guò)基站,兩個(gè)用戶節(jié)點(diǎn)直接進(jìn)行通信,即D2D(device to device)通信模式。
相比DSRC 技術(shù),C-V2X 技術(shù)有以下幾點(diǎn)優(yōu)勢(shì)。首先是其高網(wǎng)絡(luò)容量,可支持高帶寬和大數(shù)據(jù)量需求。其次,蜂窩網(wǎng)絡(luò)的通信覆蓋范圍要遠(yuǎn)大于DSRC 的通信范圍,車(chē)輛與基站連接申請(qǐng)網(wǎng)絡(luò)訪問(wèn)的時(shí)間充足,降低了水平切換網(wǎng)絡(luò)的頻率,在保證通信質(zhì)量的情況下減少了網(wǎng)絡(luò)控制信令開(kāi)銷(xiāo)[17]。此外,C-V2X 不必重新部署網(wǎng)關(guān)設(shè)施,可對(duì)現(xiàn)有基站設(shè)施進(jìn)行改造即可投入使用,節(jié)約了成本。
同時(shí),從技術(shù)角度上看,C-V2X 的通信可靠性和穩(wěn)定性均優(yōu)于DSRC 系統(tǒng);但從商業(yè)應(yīng)用上看,目前DSRC 的產(chǎn)業(yè)鏈相對(duì)更成熟。
3.2.2 移動(dòng)邊緣計(jì)算技術(shù)
針對(duì)車(chē)聯(lián)網(wǎng)發(fā)展過(guò)程中數(shù)據(jù)傳輸量大,傳輸時(shí)延高的問(wèn)題,在5G-WANET 的框架中提出MECcell 框架,其關(guān)鍵技術(shù)就是移動(dòng)邊緣計(jì)算(Mobile Edge Computing,MEC)。MEC 服務(wù)器部署在接近終端的本地區(qū)域內(nèi),解決云端空間不足、計(jì)算能力受限的問(wèn)題[18]。引入MEC 技術(shù),可實(shí)時(shí)感知網(wǎng)絡(luò)下文信息,根據(jù)用戶發(fā)起服務(wù)請(qǐng)求的應(yīng)用類(lèi)型選擇數(shù)據(jù)卸載方式。對(duì)于時(shí)延要求高的業(yè)務(wù),路由管理器優(yōu)先分配其在本地或本區(qū)域內(nèi)MEC 服務(wù)器上進(jìn)行卸載處理;對(duì)于時(shí)延要求寬松的應(yīng)用,可匯聚至云端進(jìn)行計(jì)算。
3.2.3 軟件定義網(wǎng)絡(luò)技術(shù)
軟件定義網(wǎng)絡(luò)(Software Defined Network,SDN)將傳統(tǒng)網(wǎng)絡(luò)的數(shù)據(jù)平面和控制平面分離,在數(shù)據(jù)發(fā)送到網(wǎng)絡(luò)設(shè)備之前,SDN 控制器創(chuàng)建任務(wù)規(guī)則,同時(shí)指示網(wǎng)絡(luò)行為邏輯,通過(guò)集中控制器中的軟件平臺(tái)實(shí)現(xiàn)對(duì)底層應(yīng)用的可編程化[19]。SDN 應(yīng)用在VANET 環(huán)境中,實(shí)現(xiàn)從主網(wǎng)絡(luò)中導(dǎo)出網(wǎng)絡(luò)基礎(chǔ)結(jié)構(gòu)的功能,使得VANET 網(wǎng)絡(luò)獲得高適應(yīng)性、高靈活性以及可編程性。
現(xiàn)有的集成SDN 的VANET 中,數(shù)據(jù)平面由固定組件RSU 和主要組件車(chē)輛組成,SDN 控制器會(huì)根據(jù)車(chē)輛需求來(lái)對(duì)不同車(chē)輛進(jìn)行配置,車(chē)輛自身運(yùn)行信息又發(fā)送至SDN 控制器來(lái)增強(qiáng)網(wǎng)絡(luò)配置,這些信息將被放置在已經(jīng)建立OF(OpenFlow)流表的RSU 中。控制平面主要對(duì)數(shù)據(jù)平面中所有車(chē)輛和RSU 信息進(jìn)行調(diào)控,對(duì)SDN 控制器收集到的車(chē)輛信息進(jìn)行存儲(chǔ)和處理,最后利用收集到的信息定位轉(zhuǎn)發(fā)決策,找到轉(zhuǎn)發(fā)數(shù)據(jù)包到達(dá)目的地址最合適的路由[20]。SDN 控制器通過(guò)北向接口提供網(wǎng)絡(luò)應(yīng)用程序,然后經(jīng)南向接口注入數(shù)據(jù)轉(zhuǎn)發(fā)規(guī)則,最終實(shí)現(xiàn)底層應(yīng)用的可編程化,增強(qiáng)VANET 網(wǎng)絡(luò)的自適應(yīng)性,優(yōu)化無(wú)線資源分配和網(wǎng)絡(luò)選擇問(wèn)題。
3.2.4 網(wǎng)絡(luò)切片技術(shù)
網(wǎng)絡(luò)切片技術(shù)就是根據(jù)用戶對(duì)時(shí)延、帶寬、消息可靠性等功能的不同需求,將物理網(wǎng)絡(luò)切分為多個(gè)端到端的虛擬網(wǎng)絡(luò),每個(gè)虛擬切片以性能指標(biāo)的差異來(lái)適應(yīng)不同的場(chǎng)景[21]。這種虛擬網(wǎng)絡(luò)劃分方式不僅避免了為每一個(gè)服務(wù)建設(shè)一個(gè)專(zhuān)用物理網(wǎng)絡(luò)的問(wèn)題,而且為不同的應(yīng)用場(chǎng)景提供相對(duì)隔離的網(wǎng)絡(luò)環(huán)境。切片之間互不干擾,每個(gè)用戶根據(jù)自身需求定制網(wǎng)絡(luò)切片。
在未來(lái)5G 網(wǎng)絡(luò)場(chǎng)景下,網(wǎng)絡(luò)切片技術(shù)主要應(yīng)用在三類(lèi)服務(wù)場(chǎng)景中,一是需要高寬帶容量的移動(dòng)寬帶場(chǎng)景,二是在測(cè)量、農(nóng)業(yè)、物流以及醫(yī)療中部署海量傳感器的物聯(lián)網(wǎng)場(chǎng)景,三是有著低時(shí)延、高可靠的自動(dòng)駕駛場(chǎng)景中。車(chē)聯(lián)網(wǎng)中V2X 服務(wù)和應(yīng)用程序多種多樣,同一輛車(chē)中,駕駛員可能需要低時(shí)延、高可靠的網(wǎng)絡(luò)切片與外界進(jìn)行通信,而乘客可能需要高帶寬、大容量的網(wǎng)絡(luò)切片來(lái)觀看視頻,因此車(chē)聯(lián)網(wǎng)中網(wǎng)絡(luò)切片的設(shè)計(jì)將比其他垂直產(chǎn)業(yè)更復(fù)雜。
3.2.5 區(qū)塊鏈技術(shù)
車(chē)輛安全包括行駛安全和信息安全,在復(fù)雜多變的無(wú)線通信環(huán)境中,車(chē)輛的行駛信息很容易被黑客攻擊截獲甚至用來(lái)控制車(chē)輛的行駛,造成不可估量的后果。因此需要對(duì)車(chē)輛的行駛軌跡等隱私信息進(jìn)行保護(hù),區(qū)塊鏈技術(shù)的去中心化和不可偽造性為車(chē)聯(lián)網(wǎng)環(huán)境中的安全通信提供了一個(gè)可行的解決方案[22]。區(qū)塊鏈技術(shù)又名賬本技術(shù),以車(chē)聯(lián)網(wǎng)環(huán)境中的終端設(shè)備和車(chē)輛管理中心為節(jié)點(diǎn)組成區(qū)塊鏈網(wǎng)絡(luò)。“賬本”為記錄整個(gè)車(chē)聯(lián)網(wǎng)信息交互的數(shù)據(jù)庫(kù),“去中心化”體現(xiàn)在每輛車(chē)都可以參與數(shù)據(jù)庫(kù)的記錄,并且當(dāng)車(chē)輛進(jìn)行V2X 通信訪問(wèn)操作改變了賬本的狀態(tài)時(shí),新的記錄會(huì)被添加在賬本中。“區(qū)塊”負(fù)責(zé)記錄一段時(shí)間內(nèi)賬本的動(dòng)態(tài)變化情況,“鏈”則是各個(gè)區(qū)塊以狀態(tài)改變的時(shí)間順序串聯(lián)起來(lái)形成整個(gè)車(chē)聯(lián)網(wǎng)體系中的狀態(tài)變化線。實(shí)際應(yīng)用通常將區(qū)塊鏈技術(shù)結(jié)合某些匿名認(rèn)證方案,進(jìn)行車(chē)輛注冊(cè)、消息簽名、消息驗(yàn)證三個(gè)步驟,驗(yàn)證通過(guò)為安全的車(chē)輛方可與其他車(chē)輛進(jìn)行通信。區(qū)塊鏈技術(shù)賦能車(chē)聯(lián)網(wǎng)技術(shù),共同構(gòu)建安全的智能交通體系。
4 車(chē)聯(lián)網(wǎng)發(fā)展趨勢(shì)與挑戰(zhàn)
4.1 車(chē)聯(lián)網(wǎng)未來(lái)發(fā)展的趨勢(shì)
(1)5G 關(guān)鍵技術(shù)與車(chē)聯(lián)網(wǎng)技術(shù)深度融合。2019 年6 月,中國(guó)正式進(jìn)入5G 時(shí)代,車(chē)聯(lián)網(wǎng)技術(shù)也在5G 技術(shù)的推動(dòng)下迎來(lái)了發(fā)展的黃金時(shí)代。DSRC 技術(shù)已經(jīng)相對(duì)成熟,但因其固有的短程通信特點(diǎn)以及對(duì)路側(cè)單元等基礎(chǔ)設(shè)施的依賴(lài)而在應(yīng)用中受限,其在V2V 場(chǎng)景表現(xiàn)出的低時(shí)延、高可靠特點(diǎn)賦予車(chē)輛超高的環(huán)境感知力。目前基于蜂窩網(wǎng)的V2X 技術(shù)占據(jù)世界車(chē)聯(lián)網(wǎng)技術(shù)發(fā)展趨勢(shì)的主流地位,但C-V2X 尚未成熟,技術(shù)標(biāo)準(zhǔn)也在不停的修改和完善之中,應(yīng)用實(shí)例也不多見(jiàn),使得車(chē)聯(lián)網(wǎng)技術(shù)的發(fā)展又一次受到限制。5G 網(wǎng)絡(luò)“更高”“更快”的技術(shù)特點(diǎn)正好滿足車(chē)聯(lián)網(wǎng)中用戶需求多樣性、數(shù)據(jù)傳輸高速率、信號(hào)時(shí)延低的要求,解決了車(chē)聯(lián)網(wǎng)的核心問(wèn)題。同時(shí)5G 的關(guān)鍵技術(shù),如SDN、MEC以及網(wǎng)絡(luò)虛擬化技術(shù)將更好地運(yùn)用在車(chē)聯(lián)網(wǎng)中,解決DSRC 技術(shù)與C-V2X 技術(shù)交相融合后版本不兼容的問(wèn)題。在5G 移動(dòng)通信技術(shù)的助力下,車(chē)聯(lián)網(wǎng)生態(tài)系統(tǒng)將變得更加智能、更具彈性。
(2)車(chē)車(chē)/車(chē)路協(xié)同控制與駕駛輔助系統(tǒng)結(jié)合更加緊密。
當(dāng)前智能汽車(chē)不僅在網(wǎng)聯(lián)方面發(fā)展迅速,而且單車(chē)關(guān)鍵技術(shù)也在不斷改革之中。例如,自動(dòng)泊車(chē)技術(shù)、自適應(yīng)巡航系統(tǒng)都在實(shí)際生活中運(yùn)用廣泛。但未來(lái)自動(dòng)駕駛場(chǎng)景的實(shí)現(xiàn),單一的網(wǎng)聯(lián)技術(shù)需要傳感技術(shù)、定位技術(shù)的數(shù)據(jù)輔助作為支撐,毫無(wú)聯(lián)系的車(chē)輛需要網(wǎng)聯(lián)技術(shù)將它們聯(lián)絡(luò)起來(lái),形成實(shí)時(shí)交互的信息網(wǎng)。車(chē)聯(lián)網(wǎng)單車(chē)關(guān)鍵技術(shù)必須與網(wǎng)聯(lián)關(guān)鍵技術(shù)緊密結(jié)合、有效銜接,結(jié)合汽車(chē)本身特點(diǎn),研究生產(chǎn)兩種技術(shù)相結(jié)合的一體化汽車(chē)產(chǎn)品,才能真正達(dá)到車(chē)路協(xié)同控制與駕駛輔助系統(tǒng)的完美融合,智能網(wǎng)聯(lián)汽車(chē)才能更具溫度、更加智慧。
4.2 面臨的挑戰(zhàn)
(1)多版本兼容問(wèn)題。目前,車(chē)聯(lián)網(wǎng)C-V2X標(biāo)準(zhǔn)主要有基于R14 的LTE-V2X 版本以及增強(qiáng)型R15 版本,基于5G-V2X 標(biāo)準(zhǔn)的R16 版本也已于2020 年7 月完成,它支持V2V 和V2I 的直連通信,能實(shí)現(xiàn)基于V2X 的車(chē)輛編隊(duì)和半自動(dòng)駕駛等應(yīng)用。未來(lái)車(chē)聯(lián)網(wǎng)將在很長(zhǎng)一段時(shí)間內(nèi)出現(xiàn)LTE-V2X 和5G-V2X 兩個(gè)版本共存的情況。類(lèi)似于4G 與5G 將長(zhǎng)期共存的狀況,LTE-V2X 需要考慮后向兼容5G版本,5G 版本需要前向兼容LTE-V2X。除了需要滿足兩種不同版本車(chē)輛之間無(wú)障礙通信條件外,還需要升級(jí)支持LTE-V2X 車(chē)輛的硬件,使用戶便利快捷地享受5G 娛樂(lè)服務(wù)。
(2)投資規(guī)模大。根據(jù)規(guī)劃,中國(guó)將在2035年實(shí)現(xiàn)高度自動(dòng)駕駛。為了實(shí)現(xiàn)我國(guó)車(chē)聯(lián)網(wǎng)技術(shù)發(fā)展的這一總體目標(biāo),不僅需要在技術(shù)上有重大創(chuàng)新,還需要有巨大的資金投入。截至2020 年9 月,我國(guó)機(jī)動(dòng)車(chē)保有量達(dá)3.65 億輛,高速公路里程14.26萬(wàn)公里,無(wú)論是DSRC 還是C-V2X 作為我國(guó)車(chē)聯(lián)網(wǎng)商用技術(shù)的標(biāo)準(zhǔn),對(duì)于車(chē)載終端的安裝和路側(cè)單元的部署都是必不可少的,還有大量傳感設(shè)備的安裝,例如攝像頭、定位雷達(dá)以及環(huán)境感知設(shè)備等,這些都需要成本和投入。
(3)海量接入數(shù)據(jù)價(jià)值難以挖掘。未來(lái)“車(chē)—路—人—云”感知高度協(xié)同統(tǒng)一的車(chē)聯(lián)網(wǎng)生態(tài)體系,必將是網(wǎng)絡(luò)體系中各個(gè)終端節(jié)點(diǎn)的數(shù)據(jù)交互在一起,而龐大的數(shù)據(jù)接入量不僅給存儲(chǔ)空間帶來(lái)挑戰(zhàn),數(shù)據(jù)的處理也將是一大難題。隨著車(chē)聯(lián)網(wǎng)業(yè)務(wù)應(yīng)用功能的不斷增加,例如視頻通話、車(chē)載遠(yuǎn)程會(huì)議以及遠(yuǎn)程車(chē)輛控制等新應(yīng)用,既對(duì)數(shù)據(jù)傳輸速率有很高的要求,同時(shí)也要求有很強(qiáng)的數(shù)據(jù)處理能力。此外,哪些應(yīng)用優(yōu)先運(yùn)行,哪些數(shù)據(jù)優(yōu)先處理,如何進(jìn)行無(wú)線資源分配,如何優(yōu)化系統(tǒng)性能等,這些都是需要解決的問(wèn)題。
5 結(jié)語(yǔ)
面向第五代移動(dòng)通信技術(shù)的車(chē)聯(lián)網(wǎng)系統(tǒng),正在通過(guò)車(chē)內(nèi)網(wǎng)絡(luò)的整體感知、定位等關(guān)鍵技術(shù),把傳統(tǒng)的作為代步工具的汽車(chē)發(fā)展成為智慧的出行助手。車(chē)聯(lián)網(wǎng)通過(guò)DSRC、C-V2X 等無(wú)線通信技術(shù)的不斷革新,把汽車(chē)這一個(gè)又一個(gè)獨(dú)立的個(gè)體緊密地組織成為統(tǒng)一的網(wǎng)絡(luò)體系。智慧車(chē)聯(lián)網(wǎng)絡(luò)通過(guò)SDN、MEC、網(wǎng)絡(luò)切片等5G 關(guān)鍵技術(shù)與車(chē)聯(lián)網(wǎng)技術(shù)的深度融合,把車(chē)、路、人、云這些各自在交通系統(tǒng)中扮演不同角色的參與者結(jié)合起來(lái),將車(chē)聯(lián)網(wǎng)體系發(fā)展成“車(chē)—路—人—云”高度協(xié)同統(tǒng)一的智能生態(tài)體系。
智能交通生態(tài)體系的完善,自動(dòng)駕駛時(shí)代的全面到來(lái),都離不開(kāi)車(chē)聯(lián)網(wǎng)技術(shù)的創(chuàng)新和突破。現(xiàn)有車(chē)聯(lián)網(wǎng)系統(tǒng)中技術(shù)不夠完備、用戶需求小以及相關(guān)法律法規(guī)有待完善等問(wèn)題還急需解決。車(chē)聯(lián)網(wǎng)產(chǎn)業(yè)正蓄勢(shì)待發(fā),在看到機(jī)遇的同時(shí)也要積極主動(dòng)地面對(duì)所遇到的問(wèn)題。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
