基于物聯網感知的草莓采摘機器人設計
2021-01-27 03:49:06李澤宇解迎剛曹滿鑫張子軒
物聯網技術 2020年12期
關鍵詞:設計
李澤宇,解迎剛,曹滿鑫,羅 萌,張子軒
(北京信息科技大學 信息與通信工程學院,北京 100101)
0 引 言
據不完全統計,全世界草莓總產量約為5 000萬噸/年,而我國則占到了約700萬噸/年。草莓采摘作業是當前果蔬生產過程中比較費時和費力的環節。目前,草莓采摘主要依賴于人工作業,由果農直接將草莓從植株上采摘下來。然而人工采摘作業存在成本偏高、勞動強度大、采摘不及時等弊端。同時,當前我國人口老齡化現象較嚴重,農業勞動人口驟減。而隨著自動化技術的發展,自動采摘作業將逐漸代替人類進行作業,可以大大降低采摘人員的勞動強度。因此,進行草莓采摘作業自動化的研究對于社會具有重要的現實意義。
然而,草莓的大小和顏色呈現非規則、非一致等特性,其生長環境的復雜性和農田環境的非結構化等特點共同決定了采摘設備的開發有一定的難度;而且由于草莓果實生長環境復雜,加之草莓果實生長密集,果實之間的遮擋問題很嚴重,給圖像處理帶來許多困難。雖然目前已有學者進行基于機器視覺方面的研究,但目前大多停留在某一方面理論層次的研究,如單純的雙目定位、機械手采摘路徑優化等,而進行實際應用開發的研究很少。當前極個別的物化的應用研究均利用了基于PC上位機的OpenCV,即首先利用計算機視覺庫進行圖像處理,然后進一步通過控制采摘機械手對果實進行采摘。此舉導致采摘設備開發成本高、體積大和功耗高,給自動化采摘作業的推廣應用帶來新問題。
針對上述問題,本文設計了一套基于DSP的低功耗、小體積、低成本的草莓采摘機器人。實踐表明,該機器人對提高草莓采摘勞動生產率、降低農民的勞動強度和采摘成本,提高我國精準農業設施的現代化和智能化水平、加快農業科學進步具有重要的現實意義。
1 系統設計
本文設計的采摘機器人主要包括上位機模塊和下位機模塊。
上位機模塊主要包括:TMS320DM642圖像處理模塊、圖像采集模塊、視頻解碼模塊、電源模塊、視頻編碼模塊、顯示模塊和串行通信模塊等。
下位機模塊主要包括:STM32F103主控模塊、電源模塊、串行通信模塊、三維滑臺、采摘機械手、傳感器模塊、滑臺驅動器、舵機驅動器和燈光補償模塊等。
上位機和下位機主要通過RS 232串行通信模塊進行數據傳輸。上位機中的圖像采集模塊采集待采摘區域的圖像后,通過視頻解碼模塊將視頻的模擬信號轉換為數字信號送入TMS320DM642圖像處理模塊。TMS320DM642圖像處理模塊一方面通過對數字信號進行處理和分析,實現對草莓果實進行提取輪廓、形心位置確定、立體匹配和計算草莓果實的三維空間坐標等處理和將計算后的數字信號傳輸至視頻編碼模塊。視頻編碼模塊將處理后的草莓果實圖像再次轉換為模擬信號并送至顯示器進行顯示,以便開發人員調試。另一方面,TMS320DM642圖像處理模塊將計算出的草莓果實的空間三維坐標的數據通過串行通信發送至下位機STM32F103主控模塊。在這個過程中,電源模塊為上位機子模塊提供電能。
下位機中的STM32F103主控模塊通過串行通信口接收到來自TMS320DM642發送的草莓果實三維空間坐標數據后提取坐標的有效值;然后通過滑臺驅動器驅動三維滑臺運動至帶采摘草莓果實的正前方位置;之后,STM32F103主控模塊控制舵機驅動器驅動采摘機械手對草莓果實進行準確抓取和采摘;最后將草莓果實送入集果箱中。在下位機工作過程中,電源模塊為下位機系統提供電能,同時碰撞傳感器和觸碰傳感器實時檢測三維滑臺是否到達端點,觸碰傳感器實時檢測采摘機械手在對草莓果實進行抓取時,機械手的兩個手掌是否已經接觸到草莓果實。燈光補償模塊能夠使使TMS320DM642圖像處理模塊更好地對外界圖像進行處理,減少外界光源對系統的干擾。
本文設計的草莓采摘機器人的整體結構框圖如圖1所示。
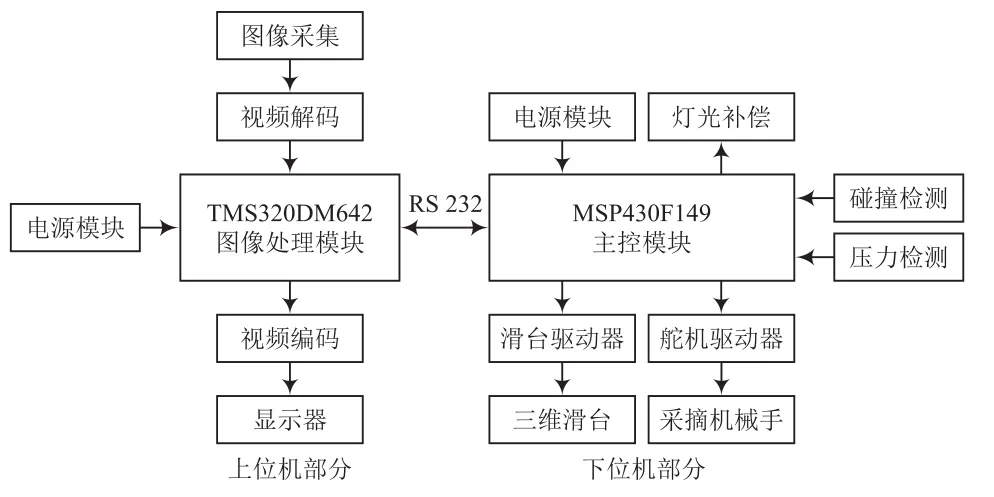
圖1 草莓采摘機器人的整體結構框圖
基于圖像處理的采摘機器人的設計流程如圖2所示。主要步驟包括上下位機的硬件搭建、雙目攝像機內外參數的標定等。其中,硬件搭建還包括DSP與STM32F103之間的串行通信,數字圖像采集還包括將采集的模擬信號轉換為數字信號送入DSP中。
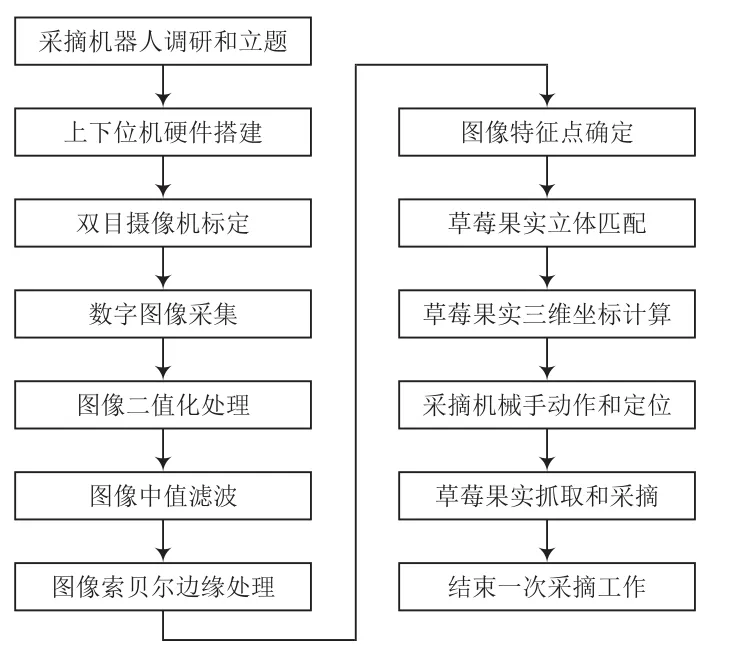
圖2 基于圖像處理的采摘機器人的設計流程
2 實驗結果
本設計通過使用DSP代替原有的需要依賴OpenCV進行圖像處理的計算機,利用低成本、小體積的數字信號處理器實現了雙目攝像機圖像采集。
本設計完成的主要工作有:
(1)進行了系統整體的硬件方案的選擇和設計;
(2)通過VC實現了對雙目攝像機進行內部參數的獲取和校正;
(3)利用DSP控制雙目攝像機進行雙路視頻采集并對采集的圖像進行了閾值分割、索貝爾邊緣處理、中值濾波等操作,并通過處理后的圖像找到了形心;
(4)實現了利用DSP對特征點的簡單匹配及三維重建處理,并能簡單的進行三維坐標的計算和將計算結果輸送至控制器;
(5)實現了DSP與控制器之間的通信,下位機能根據通信數據實現對三維滑臺和機械手的控制;
(6)實現了DSP和控制器能協調工作,完成對某一區域內草莓的采摘工作。
本系統在選型的時候就考慮到了農業工作環境的復雜性,并且盡可能提高系統的穩定性能和工作效率。
3 結 語
本文針對現有草莓采摘設備存在開發成本高、體積大和功耗高等問題,設計了一套基于DSP的草莓采摘機器人。實驗結果表明,該設計達到了預期目標,其對提高草莓采摘率,降低農民的勞動強度和采摘成本,提高我國精準農業設施的現代化和智能化水平,加快農業科學進步具有重要的現實意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
